芯片拾取头旋转精度测量方法研究
2016-11-23侯一雪曹国斌田志峰
侯一雪,曹国斌,田志峰
(中国电子科技集团公司第二研究所,山西太原030024)
芯片拾取头旋转精度测量方法研究
侯一雪,曹国斌,田志峰
(中国电子科技集团公司第二研究所,山西太原030024)
在全自动贴片设备中,采用吸头吸取芯片的方式是常用功能之一。由于对位高精度要求,吸头通常具有旋转功能,旋转精度是非常重要的技术指标,如何判定显得尤为重要,因此吸头旋转精度的测量方法成为关键技术之一。以精密组装系统的吸附机构为例,采用5种方法测量芯片拾取头的旋转精度,通过实际测量与数据分析,比较了几种方法的优缺点,推荐了较为可信的测试方法,可为类似结构的测试提供理论与实践依据。
芯片拾放;旋转精度;测量方法。
先进微组装设备要满足微小芯片高精度贴片对位要求,芯片吸附机构的旋转功能是必要选项。由于吸附机构与工作平面的垂直度存在实际偏差,造成旋转时吸头在工作平面x、y方向的偏差,这个偏差会影响贴片精度。通常高精度的贴装要求旋转重复定位精度要达到±0.01°,通过正确的测量方法,可以拟合出旋转曲线,从而提高贴放精度。而旋转系统精度能否达到要求,需通过科学的测量方法来验证。本文以精密组装系统的芯片吸附机构为实物模型,采用了5种旋转重复定位精度的测量方法,通过理论研究与实测数据分析,说明了这些方法的优缺点与可行性,指出符合精度要求的最佳测量方法,为类似结构的设计与验证提供了可借鉴的经验。
1 芯片吸附结构特点
精密组装系统的芯片吸附结构如图1所示,芯片吸附结构是一套八转塔头组件,与俯视相机并列安装在Z轴上,Z轴、θ轴与Y轴动子相连,Y轴悬臂结构通过斜拉支架固定在X轴上,X轴稳定在钢结构与蜂窝板支撑的平台上,在本结构中Y轴选用悬臂结构。此结构使吸头与相机稳定、灵巧地运动于工作平台上方。
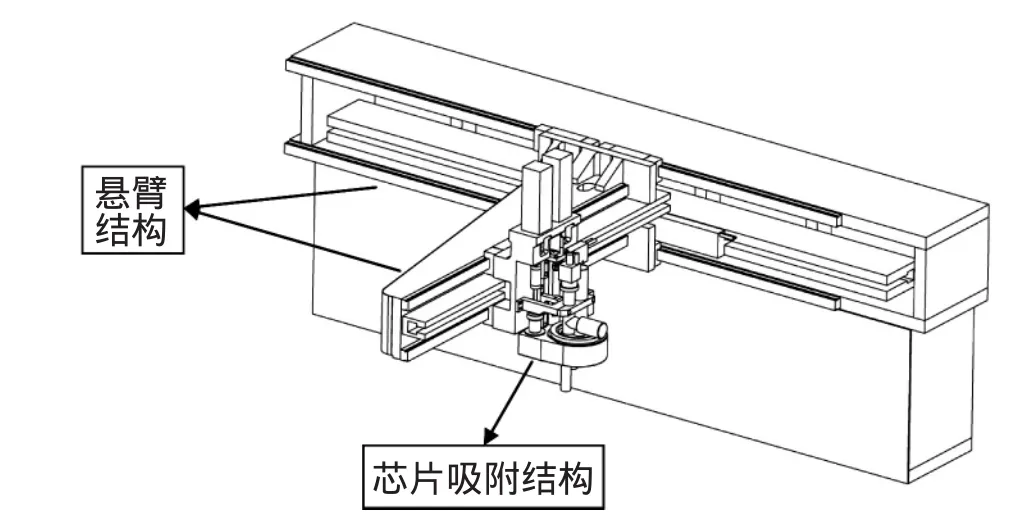
图1 芯片吸附机构示意图
图1所示的芯片吸附旋转机构由伺服电机控制,安装有高精度圆光栅;上位机实时读取定位信号,采用闭环控制。
2 芯片吸附结构旋转精度测量方法
2.1采用激光干涉的测量方法
本方法采用的测试仪器为激光干涉仪。具体是在旋转轴上选取一位置固定辅助测量块,其角度定义为A角。调试激光干涉仪测量元件,旋转轴以1°为行程,往返转动5次,记录每次到位后的旋转度数,计算出定位精度;旋转轴转动大角度(几十度)到另外任选的两个位置B、C,再按上述方法测量这两个位置的定位精度,最终的旋转重复定位精度取A、B、C三点测量结果的最大值。测试点示意图如图2所示。
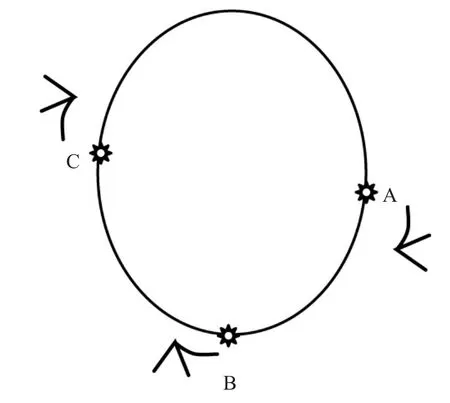
图2 测试点选取的位置示意图
此结构中旋转轴选取圆光栅的精度是2.06",也就是0.000572°,从光栅实时返馈回的数据显示,系统控制步距0.001°是可行的,这比目标指标要求的0.01°高一个数量级,也就是说无论从分辨率、控制方式还是执行机构上考虑,如果旋转大角度时有累积误差,由于光栅的精度和控制方式的作用,最终的定位与重复定位误差都能控制在小于0.01°的范围内。换句话说,这种测量方式是可以指征旋转轴的旋转精度的。
这种测试方法的优点是非接触测量,直接指征了设备旋转轴的重复定位精度。
2.2采用关节臂测量机拟合线的测量方法
本方法采用的测试仪器为关节臂测量机。关节臂测量机是接触式测量,可采用不同的测量头采集数据。把测试点设定在靠近旋转中心的位置,减少接触测量时轴向推力造成的误差。
此方法为了验证关节臂测量机是否能胜任旋转轴的精度测量,设定旋转轴不动,用关节臂测量仪采集数据,采用两点拟合一线(两个点是固定不变的),线线之间的角度应为0度。每个点采集5次,拟合10条线;换用关节臂提供的3个测量头测量相同的点;实际测量数据结果如表1~3所示。
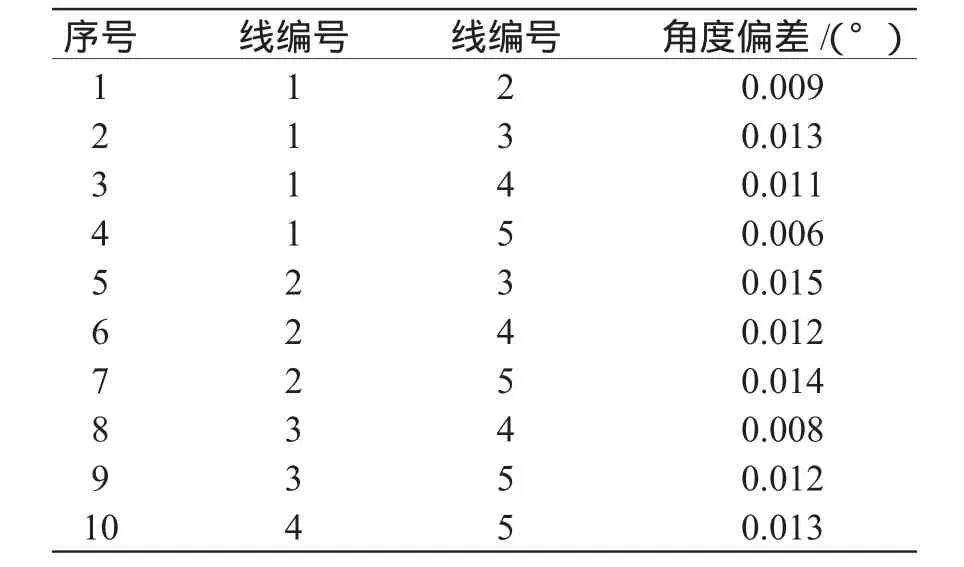
表1 采用直径为3 mm红宝石测量头的测量结果
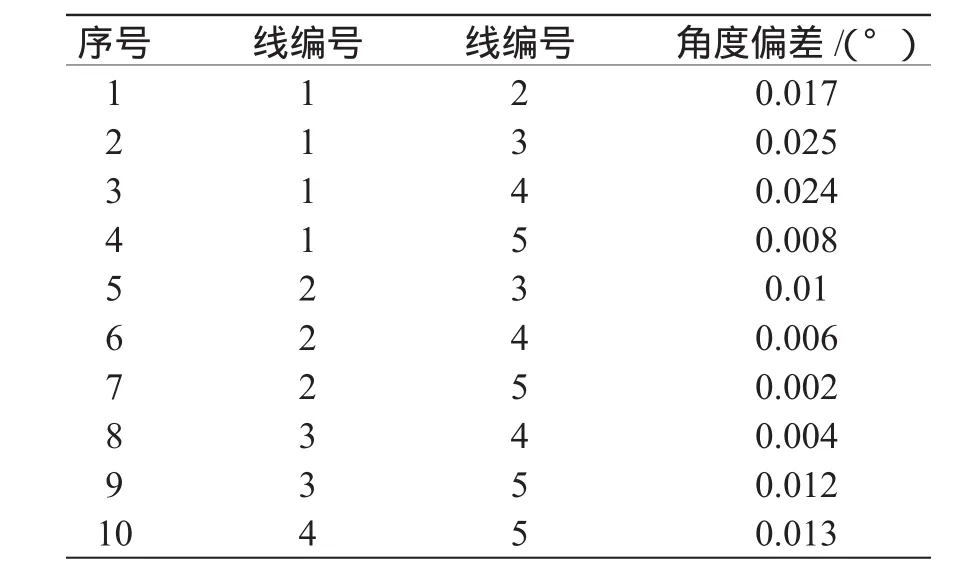
表2 采用直径6 mm红宝石测量头的测量结果
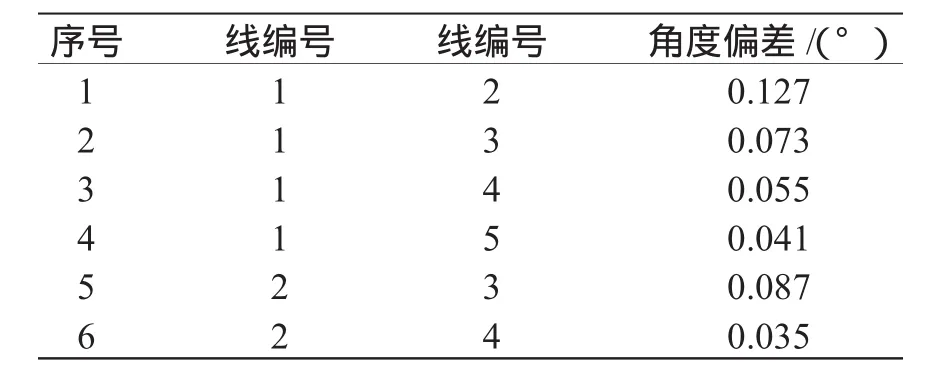
表3 采用不锈钢测量头的测量结果
从以上数据可以得出结论:用这种测量方式不能满足旋转精度±0.01°的要求。
从理论上也能证明这种测试方法不可行,如图4模型分析图所示。当拟合的线与旋转轴面完全平行时,以上方法是可行的;但当其间存在一定角度时,就不能验证。如下面的模型,当测试的线与旋转轴面有1°的夹角时(这个角度在设定测量点是无法控制的,1°已经是尽量小了。)利用模型模拟,测量结果如表4所示。
以上数据表明,当测试线与旋转面成一定角度时,测量误差与旋转角度形成正态分布曲线,如图3所示。
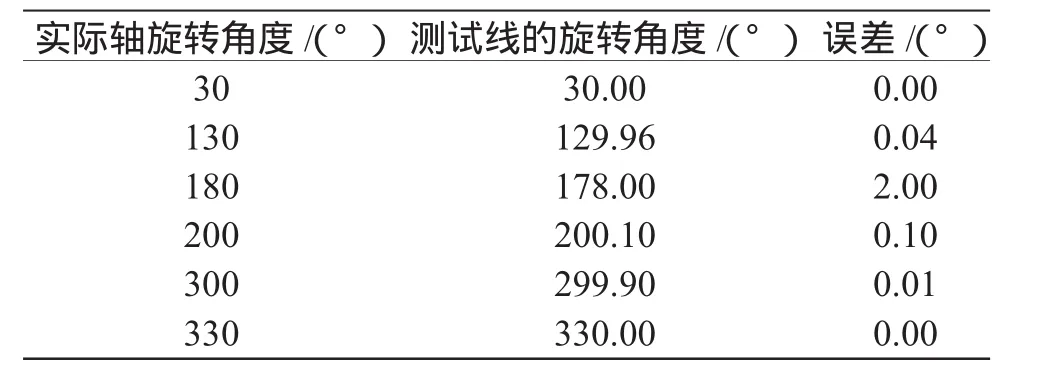
表4 线与旋转面的夹角为1°时的数据
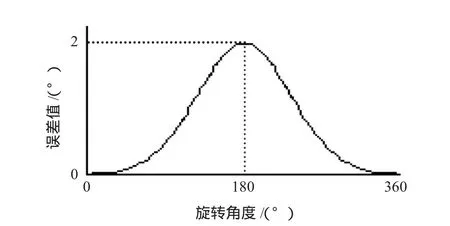
图3 当选取的测试线与旋转轴面存在1°夹角时的正态分布图
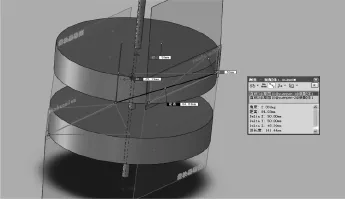
图4 测试线与旋转面的夹角为1°时模型分析图
结论:在实际测量时,不可能选择的测试线与旋转面完全平行,且旋转角度不同时,误差在360°内成正态分布,180°时最大;测试线和旋转面的夹角越大,误差越大。
2.3采用关节臂测量机拟合面的测量方法
测试仪器仍为关节臂测量仪,采用线拟合成面,测量面与面间的角度。用这种测量方式,需要把标准量块固定在旋转轴上,同线测量一样,安装量块的平面与旋转轴面必然存在一定夹角,当夹角为1°时,模型旋转后模拟数据如表5所示。
表5中数据表明,当量块安装面与旋转面成一定角度时(或者说量块安装面与旋转轴向面不平行时),测量误差与旋转角度形成正态分布曲线,同图3所示。模型分析如图5所示。
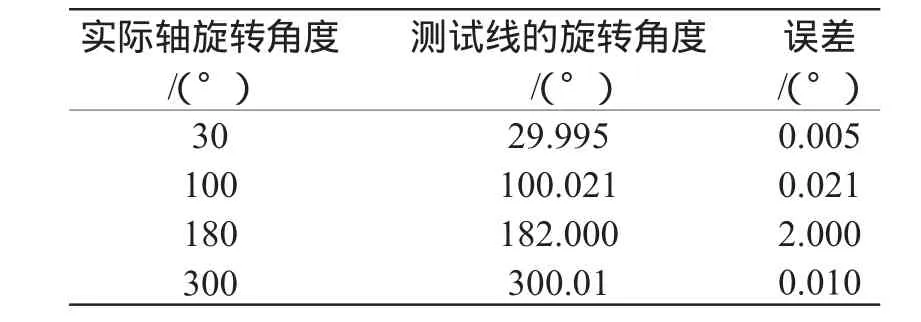
表5 量块安装面与旋转面的夹角为1°时的数据
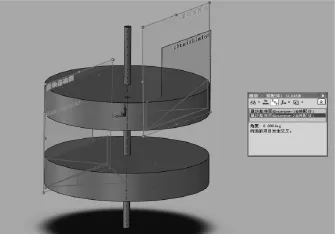
图5 量块安装面与旋转轴向面的夹角为1°时模型分析图
结论:选择的安装标准量块的方式也无法指征旋转精度。现象同线拟合的方式相同。实际上,面的平面度还会影响面的拟合,夹角同样的情况下,比线拟合的误差会更大。只是在做模型时没有考虑平面度的问题,看起来误差规律与线拟合是一致的。
另外接触式测量方式因为是手持式的,还存在操作时的人为误差。
2.4采用拾放校验片的测量方法
利用拾放玻璃校验片的方式,间接验证旋转角度精度。
之所以选择玻璃材料的校验片,是因为验证需采用3D图像测量仪,材料必须有透视特性。
用这种方式指征旋转精度,必然要引入两个因素直接影响最终的测量结果:
(1)视场的角度误差。因为拾放需要视觉定位,首先玻璃校验片的放置就存在角度,视觉定位又加入一个角度误差,这时已不能单纯的指征旋转精度了。
(2)拾放误差。在拾放过程中,x、y向的误差不是单独存在的,尤其在拾起和放下的动作过程中,不可避免地存在角度的旋转,尽管这个误差很小,但是是不确定因素。
基于以上两点的原因,这种测量方式也是不可行的。
2.5采用设备自装圆光栅的测量方法
利用设备上的圆光栅进行测量,通过光栅返馈读数计算定位精度。圆光栅的精度根据出厂证明可得到。直接从系统软件界面可读取实时位置反馈。但测量依据为设备自带圆光栅及控制系统,不符合第三方测量的原则。
3 结论
芯片拾取头旋转是目前全自动设备需具备的主要功能,本文通过5种方法的比较与实际检测结果分析,第一种方法为非接触测量,通过第三方测量仪器检测,可减少误差源,能最好地指征芯片拾取头旋转精度的测量结果,认为这种方法较为合理、可信。其他4种方法都有各自不确定性,存在采点特殊要求及累积误差,当旋转重复定位精度指标为±0.01°时,不易采用。
[1]李兵,何正嘉,陈雪峰.ANSYSWorkbench设计、仿真与优化[M].北京:清华大学出版社.2008.
[2]沈海宁.高精度全视觉贴片机的系统软件设计与实现[J].机械设计与制造2010(06):85-87.
[3]张世浩.贴片机视觉系统校正技术研究[C].哈尔滨:哈尔滨工业大学,2014.
Study of The Circumrotation Accuracy Measure of Chip Picking And Placing Machine
HOU Yixue,CAO Guobin,TIAN ZhiFeng
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
In the fully automatic equipment,the use of suction head picking and placing chip is one of the commonly used functions.Due to the high alignment accuracy requirements,suction head usually has function of rotation,rotation accuracy is very important technical indicators,to determine how to appear particularly important.Therefore,the head rotation accuracy measurement method has become the key technology.The adsorption mechanism of the precision assembly system for example,by 5 kinds of method for measuring the chip pickup head rotation accuracy,through the actual measurement and data analysis,comparing the advantages and disadvantages of several methods and more reliable testing method is recommended,a more reliable test method is recommended,which can provide theoretical and practical basis for the test of similar structure.
Picking and placing chip;Rotation accuracy;Measure method
TN305
A
1004-4507(2016)10-0022-04
2016-09-14
侯一雪(1972-),女,高级工程师,主要从事微组装电子专用设备及工艺技术的研发工作。