基于虚拟样机技术的摊铺机振捣器动力学特性研究
2016-11-23黄传辉李付星
孙 健, 黄传辉, 李付星
(徐州工程学院 机电工程学院,江苏 徐州 221111)
基于虚拟样机技术的摊铺机振捣器动力学特性研究
孙 健, 黄传辉, 李付星
(徐州工程学院 机电工程学院,江苏 徐州 221111)
摊铺机振捣机构工作时,振捣梁的复合运动会对熨平板箱体产生冲击,直接影响了路面的摊铺质量。以9.0 m熨平板双振捣机构为研究对象,采用多体机械系统仿真软件ADAMS建立了熨平板振捣器的动力学模型,通过仿真分析,得到了振捣频率、振幅及各段间相位角对振捣梁惯性力和惯性力矩的影响规律。结果表明:主振捣振幅为5 mm,副振捣振幅调整为3或6 mm时,振捣器产生的惯性力和惯性力矩较小;随着振捣转速的增加,振捣装置的惯性力增加幅度较大,且均匀性变差;各加长段间的相位角调整为60°时,双振捣机构对熨平板框架产生的影响较小。
摊铺机;振捣机构;虚拟样机;动力学特性
摊铺机是一种主要用于高速公路上基层和面层各种材料摊铺作业的施工设备。熨平板是摊铺机的主要工作装置,其工作性能的好坏对施工质量起十分重要的作用,实现了对摊铺路面整型、整平和压实。熨平装置的主要工作机构是振捣压实机构,具有双振捣压实机构的熨平板因具有高平整度、高密实度以及较高的作业效率等特点而在市场上得到了广泛的应用[1]。
传统的产品开发要经过理论设计、样机试制、性能试验、改进定型和批量生产等步骤,对于熨平板的结构设计分析较多采用的经验设计,使得设计的产品振动平稳性较差,严重影响路面的施工质量。运用CAE仿真的方式,能够对设计好的机械进行多种力学性能分析,可以快速检验设计方案,并进行多参数分析研究,达到提高产品性能,获得最大经济效益的目的[2-3]。在理论研究方面,现有对熨平板振捣器的部分研究过于简化,将双振捣机构简化成简谐振动进行计算,没有考虑振捣梁摆动的影响[4]。文献[5]基于复数矢量法对双振捣机构进行了理论计算,分析过程较为繁琐,且仅计算了振捣机构的运动学参数。本文通过对双振捣机构结构和原理的分析,依据机构的实物模型,采用多体机械系统仿真软件建立9.0 m熨平板振捣机构的虚拟样机模型并进行动力学仿真分析, 研究了振捣频率、振幅以及相位角对摊铺质量的影响规律。研究结果为摊铺机的设计与施工参数的调整提供了参考。
1 双振捣机构结构与理论分析
1.1 结构分析
振捣装置为板-梁结构,梁的上部为栅板,将梁悬挂在偏心轴上。偏心轴通常由液压马达或电机驱动旋转,使振捣梁作上下垂直振动,对摊铺物料进行预捣实,以达到摊铺层的预压实度要求[6]。目前,国内外高端摊铺机都采用了双振捣机构的结构型式,如图1所示。图1中只表示了双振捣机构的一个加长部分,由多个图中所示的加长部分联接在一起构成了9.0 m摊铺机双振捣机构。
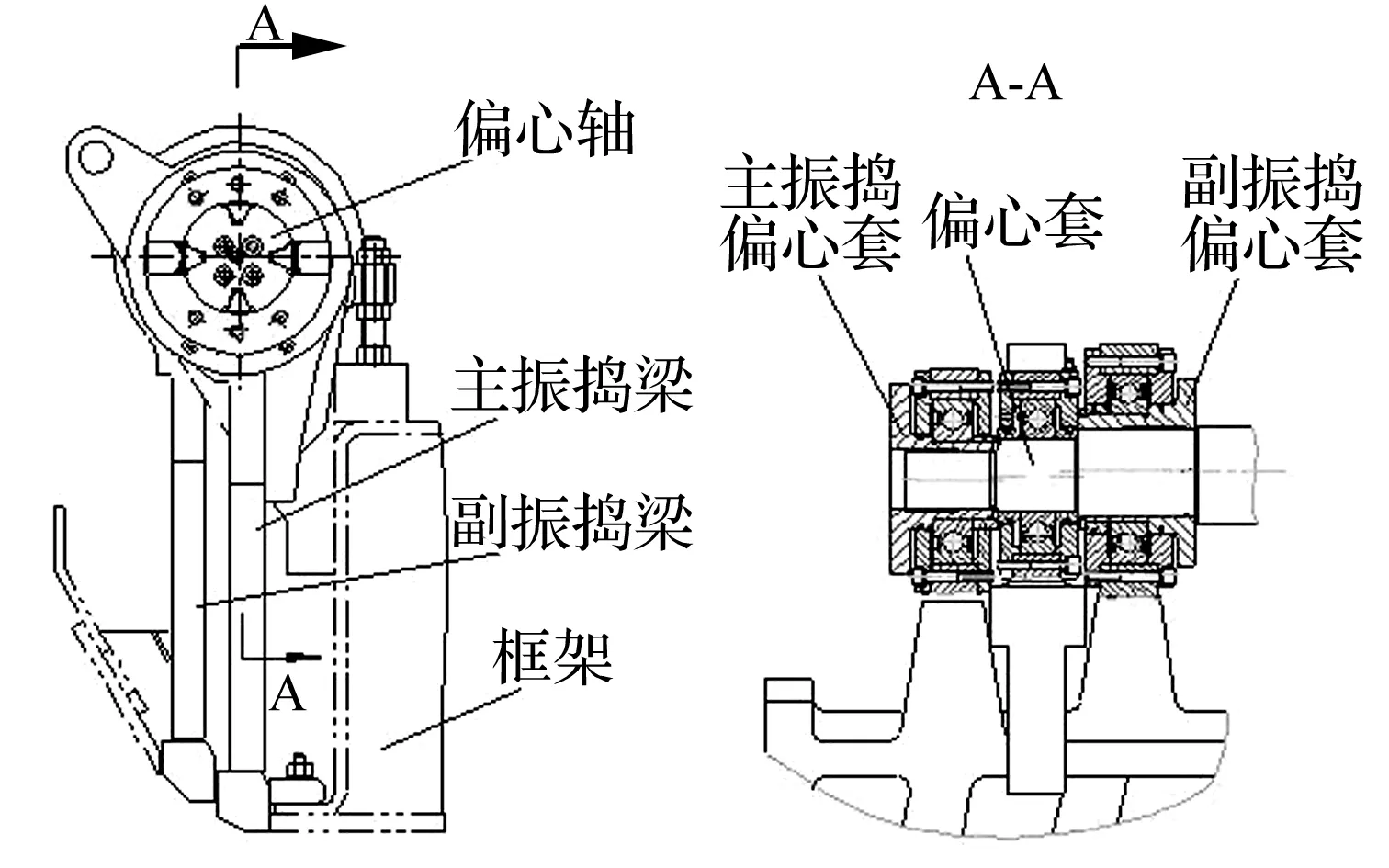
图1 双振捣机构结构型式Fig.1 Structure of double-tamper mechanism
摊铺机双振捣机构主要由偏心轴、偏心套以及主副振捣梁组成。振捣器偏心轴固定在熨平板框架上,偏心轴上偏心部分与机构旋转中心的偏心量为e1,偏心轴上安装有偏心套,偏心套外圆相对于偏心套内孔中心的偏心量为e2,旋转角为a,调幅分析简图参见文献[1]。总的偏心量e为轴和套偏心量的向量和,振捣行程H用下式计算。
(1)
通过调节偏心轴与偏心套的偏心量,可以得到多种不同的振捣振幅组合,也可以实现振捣梁间的不同的相位关系,从而使作用于熨平板的惯性力达到较优的结果[7]。
1.2 理论建模
摊铺机双振捣机构工作时,由于主副振捣梁运动产生的不平衡惯性力将会造成熨平板框架振动不均匀和变形,对摊铺作业产生影响。早期对振捣机构进行研究时,把振捣机构简化成简谐振动,虽然可以研究其振幅和频率的变化,但未能实际应用。本文将双振捣机构视作两套并联的曲柄滑块机构进行分析,建立如图2所示的计算模型。
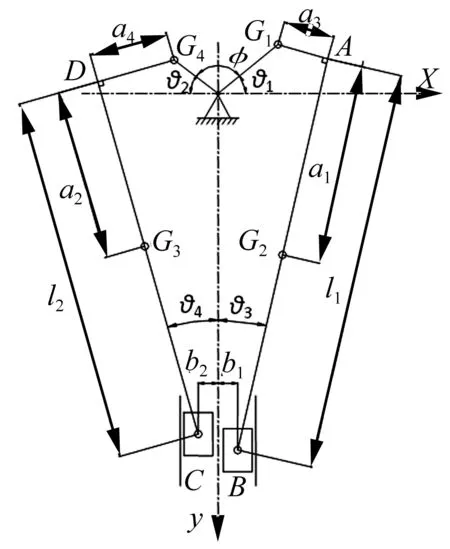
图2 单段双振捣机构动力学模型Fig.2 Dynamic model of double-tamper mechanism
可将单段振捣机构看做4个刚体组成,分别为左右两个偏心套和主副振捣压实梁。左右两个偏心套随偏心轴等速旋转,仅产生惯性力;主副振捣压实梁为刚体平面运动,在旋转过程中即产生惯性力,也产生惯性力矩。各构件质心的位移方程如下:
(2)
(3)
(4)
(5)
约束方程如下:
(6)
式中:x1~x4表示各构件x方向的位移;y1~y4表示各构件y方向的位移;θ1~θ4为各构件的初始相位角;a1为主振捣梁的质心到机构偏心中心的距离;a2为副振捣梁的质心到机构偏心中心的距离;a3为主振捣梁质心对称面到机构偏心中心的距离;a4为副振捣梁质心对称面到机构偏心中心的距离;r1表示主振捣梁连接处偏心量;r2为副振捣梁连接处偏心量。
求式(2)~式(5)的微分,可得各质心速度方程:
(7)
约束方程用矩阵表示为:
(8)
式中:

求式(7)的微分,可得各质心加速度方程:
(i=1,2,3,4)
(9)
约束方程用矩阵表示为:
(10)
式中:

单段双振捣机构的总的惯性力和惯性力矩可用下式计算。
(11)
式中:Fsx表示水平方向的惯性力;Fsy表示竖直方向的惯性力;Ms为总的惯性力矩;mi表示各构件的质量;ji为各构件的转动惯量。
实际工作中,熨平板由多段拼接而成,进行不同宽度的摊铺作业,各段的拼接方式和相位关系有多种不同的选择,下面以施工中常用的9.0 m工作状态来分析振捣机构的惯性力。此时振捣装置由8段拼接而成,包括中间2段1.5 m长的基础段和左右两侧各3段1.0 m长的加长段,结构简图如图3。
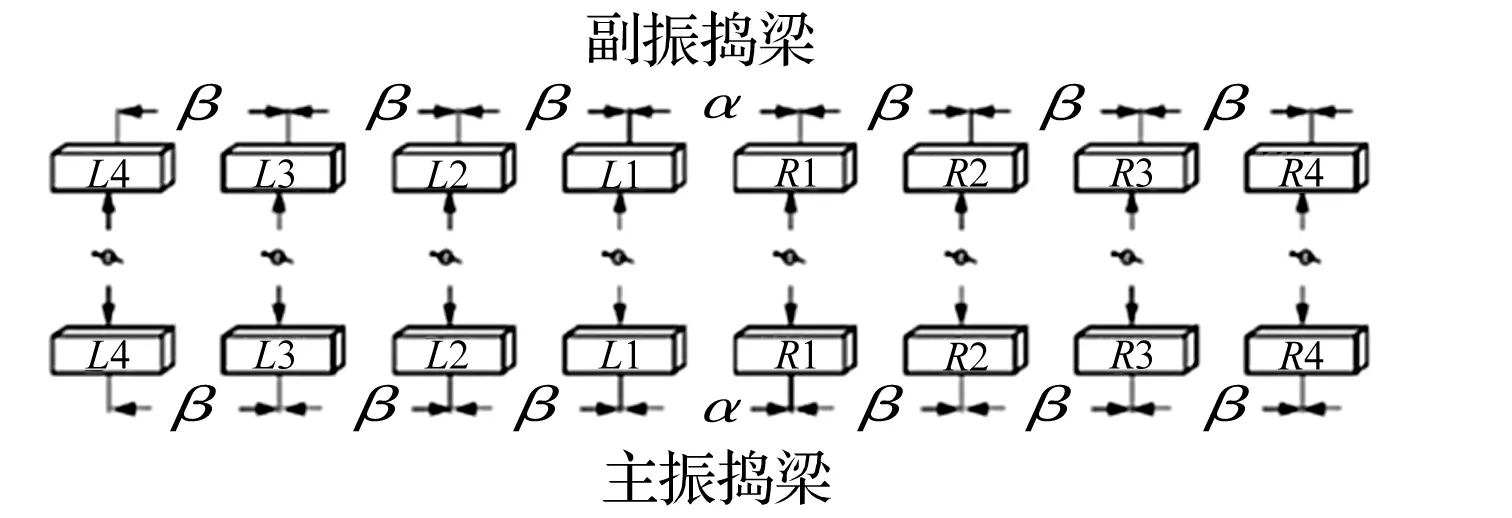
图3 9.0 m双振捣机构结构简图Fig.3 Structure diagram of 9.0 m double-tamper mechanism
图3中,α表示左右基础段振捣梁间相位差;β加长段间相位差;φ为主副振捣梁间相位角。
根据上述对双振捣机构的动力学模型分析,及参照图4所示9.0 m熨平板连接关系,可得到各段双振捣机构的惯性力以及惯性力矩表达式。
i=1,2,3,4
(12)
式中:PZi表示左侧各段振捣梁的力和力矩,PYi表示右侧各段振捣梁的力和力矩。
2 虚拟样机模型建立
本文采用ADAMS(Automatic Dynamic Analysis of Mechanical System)分析软件建立9.0 m双振捣机构的虚拟样机模型进行仿真分析。ADAMS软件目前在机械系统仿真分析中应用广泛,包含有功能强大的约束库、力库和零件库,并具有强有力数值分析功能的求解器,可基于多体系统动力学理论中的拉格朗日方程,自动建立机械系统的动力学方程,快速、精确的求解机械系统的各种运动学和动力学问题,且能以曲线和图形的方式显示仿真分析结果[8]。
2.1 基本理论

(13)
式中:q为广义坐标,u为各广义坐标的微分,f为系统外力及约束。
令y=[q,u]T为状态矢量,则系统的方程可表示为

(14)
2.2 模型建立
本文采用Pro/E建立双振捣机构的三维数字模型及实体装配关系,各构件质量参数见表1。
将建立的三维数字模型通过x_t格式文件导入到 ADAMS 中施加约束[10],给整个机构施加重力约束,在偏心轴和主副振捣梁间添加旋转约束,共建立旋转约束48个;各段双振捣机构间施加Bushing约束来连接,整个机构建立Bushing约束7个;由于在实际工作中主副振捣梁的前后有护板,在模型中将其简化为2个板条,与大地固结。主副振捣梁与面板之间施加Contact约束[11],共建立Contact约束24个。
表1 双振捣机构参数
碰撞力接触算法采用基于 Hertz 理论的 Impact 函数模型,它将实际物体的碰撞过程等效为基于穿透深度的非线性弹簧-阻尼模型,其计算表达式为
(15)
式中:k为接触刚度系数;x1为位移开关量;x为接触物体之间的实测位移变量;x为穿透系数;s为非线性弹簧力指数;d为阻尼最大时两接触物体的穿深度;c为最大接触阻尼。
接触部分需要定义相互之间的摩擦力,摩擦力使用Coulomb 法进行计算。其数值如表2所示。
表2 ADAMS中Impact 函数参数设定
利用ADAMS软件建立的9.0 m振捣机构动力学仿真模型如图4。
图4 9.0 m双振捣机构仿真模型Fig.4 Simulation model of 9.0 m double-tamper mechanism
3 虚拟样机仿真
3.1 振捣频率的影响
实际工作中,双振捣机构由安装在熨平板基础段上的液压马达驱动旋转。在右基础段偏心轴与框架连接处的旋转约束上添加驱动。由于各段双振捣机构通过轴承座与熨平板框架连接,可通过测量偏心轴和轴承座间的旋转约束上的力和力矩来分析双振捣机构所产生的惯性力与惯性力矩。取主振捣振幅为5 mm,副振捣振幅为6 mm,设置不同的振捣转速5,10,15,20,25 Hz,对系统进行分析。取各段双振捣机构的惯性力的有效值绘制图形,如图5所示。L4至R4表示从左到右排列的各段双振捣机构。
图5 惯性力随频率变化曲线Fig.5 Inertia force with different frequency
图5表明,随着振捣转速的增加,振捣装置的惯性力增加幅度较大,且均匀性变差。通过计算,在10 Hz时,惯性力的标准差为5.98, 25 Hz时,标准差为25.11。故在摊铺机施工时,应该在满足路面压实密实度的条件下,合理选择双振捣频率。频率低时,熨平板箱体受振捣机构的影响波动小;频率高时,熨平板受影响波动大。
3.2 振捣振幅的影响
以右基础段双振捣机构为研究对象,取主振捣振幅为5 mm,副振捣振幅分别为0,3,6,9,12 mm,设置振捣转速分别为5,10,15,20,25 Hz,对系统进行仿真,取各次仿真的惯性力和惯性力矩的有效值绘制图形,结果如下。
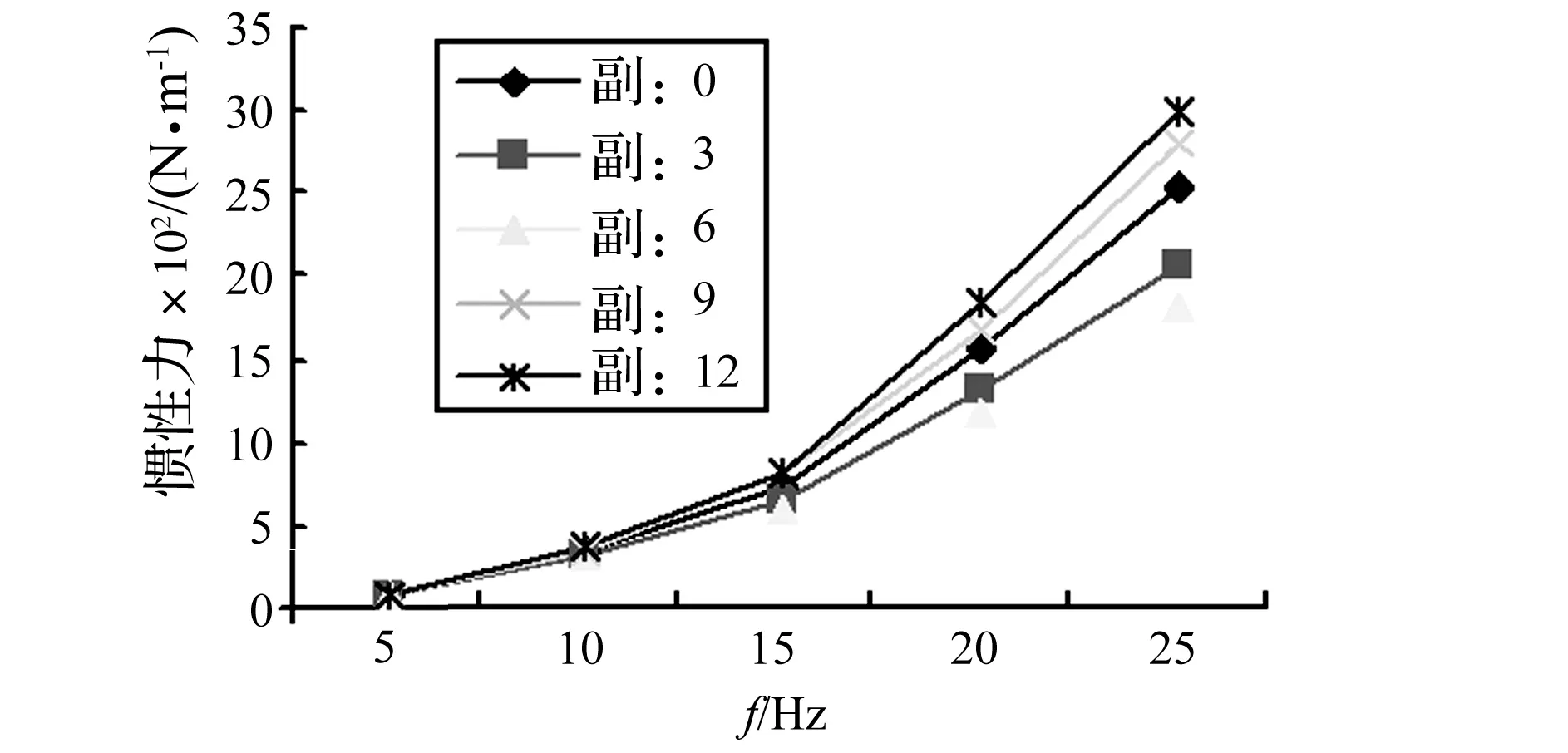
图6 不同振幅下右基础段双振捣机构惯性力Fig.6 Inertia force of right foundation section with differentamplitude
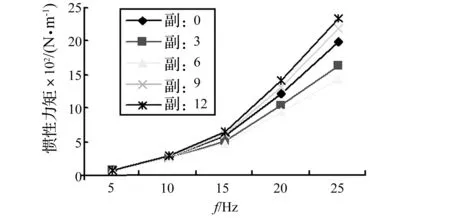
图7 不同振幅下右基础段双振捣机构惯性力矩Fig.7 Inertia moment of right foundation section with differentamplitude
图6和图7表明,主振捣振幅为5 mm,副振捣振幅调到3 mm和6 mm时,惯性力和惯性力矩较小,副振捣振幅为0 mm时,惯性力和惯性力矩变大,而副振捣振幅为9 mm和12 mm时,惯性力和惯性力矩较大。说明主副振捣梁振幅相差不大时,在同一频率旋转下,由于相位差接近180°,所以产生的惯性力基本被抵消了。振幅相差过大时,振幅小的振捣梁只能抵消部分惯性力,总的惯性力较大。
3.3 相邻振捣梁间相位角的影响
各段振捣梁间相位角是振捣装置的重要工作参数,直接影响机构惯性力的大小和分布。设置左右基础段振捣梁间相位角为施工常用的60°,基础段与加长段间及各加长段间的相位角分别为0°、60°、90°、150°、180°,取振捣转速为15 Hz,对系统进行分析。取各段双振捣机构惯性力的有效值绘制图形,结果如图8所示。
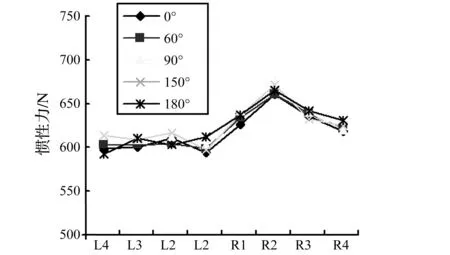
图8 不同相位角下各段双振捣机构惯性力Fig.8 Inertia force with different phase
各段双振捣机构惯性力有效值的均值和标准差见表3。

表3 均值和标准差
通过测量所加驱动上的力矩,可测得维持9.0 m双振动机构运转所需要的驱动力矩。
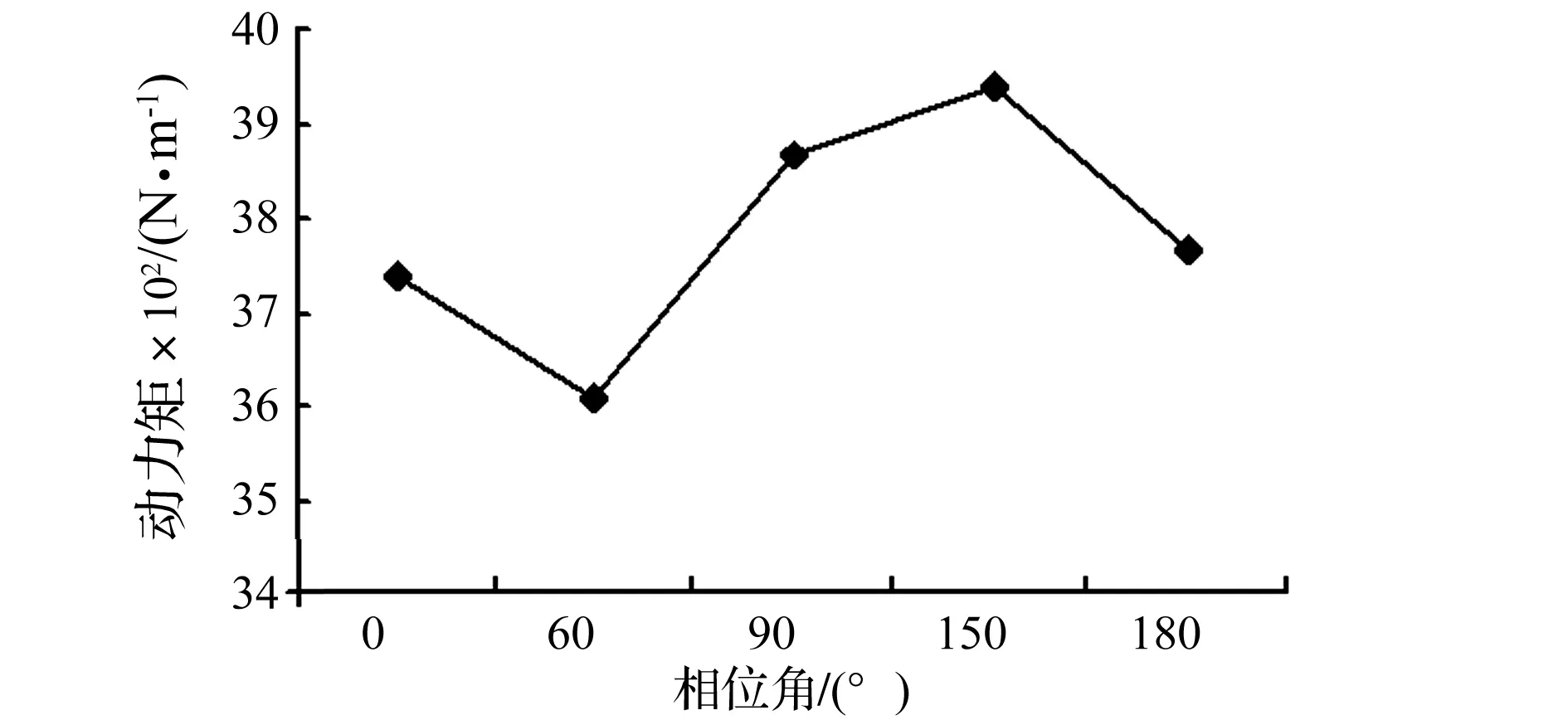
图9 不同相位角下机构驱动力矩Fig.9 Driving moment with different phase
由图8和表3可得,相位角调整为0°和60°时,惯性力较小,在90°、150°和180°时,惯性力变大,且相差不大。相位角为60°时,惯性力标准差最小,双振捣机构产生的惯性力比较均匀,而相位角为90°和180°时,均匀性变差。从图9可以看出,相位角为60°时,维持机构运转所需的驱动力矩较小,而相位角为90°和150°时,所需驱动力矩较大。因此,在施工过程中将基础段与加长段间及各加长段间的相位角调整为60°时,双振捣机构对熨平板框架产生的影响较小。
3.4 双振捣机构对熨平板的影响
以熨平板整体为研究对象,分析双振动机构在不同频率运转下,对各段熨平板质心振动的影响。取振捣频率为10,15,20,25 Hz,各段熨平板质心的加速度有效值结果如图10所示。YL4至YR4表示从左到右排列的各段熨平板。
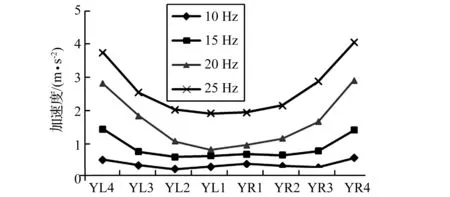
图10 不同相位角下各段双振捣机构惯性力Fig.10 Inertia force with different phase
图10表明,在各段熨平板的质心处,随着振捣频率的增加,熨平板的加速度有效值逐渐增大,且在低频时加速度有效值的波动平稳,在高频时加速度的有效值波动剧烈。在各个振捣频率下,熨平板两端的测点处更容易产生波动,与实际熨平板的工作状态吻合。
4 实验验证
为验证仿真结果,对9.0 m熨平板双振捣机构进行了实验测试,测试时熨平板固定,主副振捣梁悬空,给双振捣机构施加驱动。设置主振捣振幅为5 mm,副振捣振幅为6 mm,振捣频率分别为10 Hz、15 Hz、20 Hz和25 Hz,调整基础段与加长段间及各加长段间的相位角β分别为60°、90°、150°、180°,测定振捣机构在稳定工作下的液压系统功率,如图11所示。
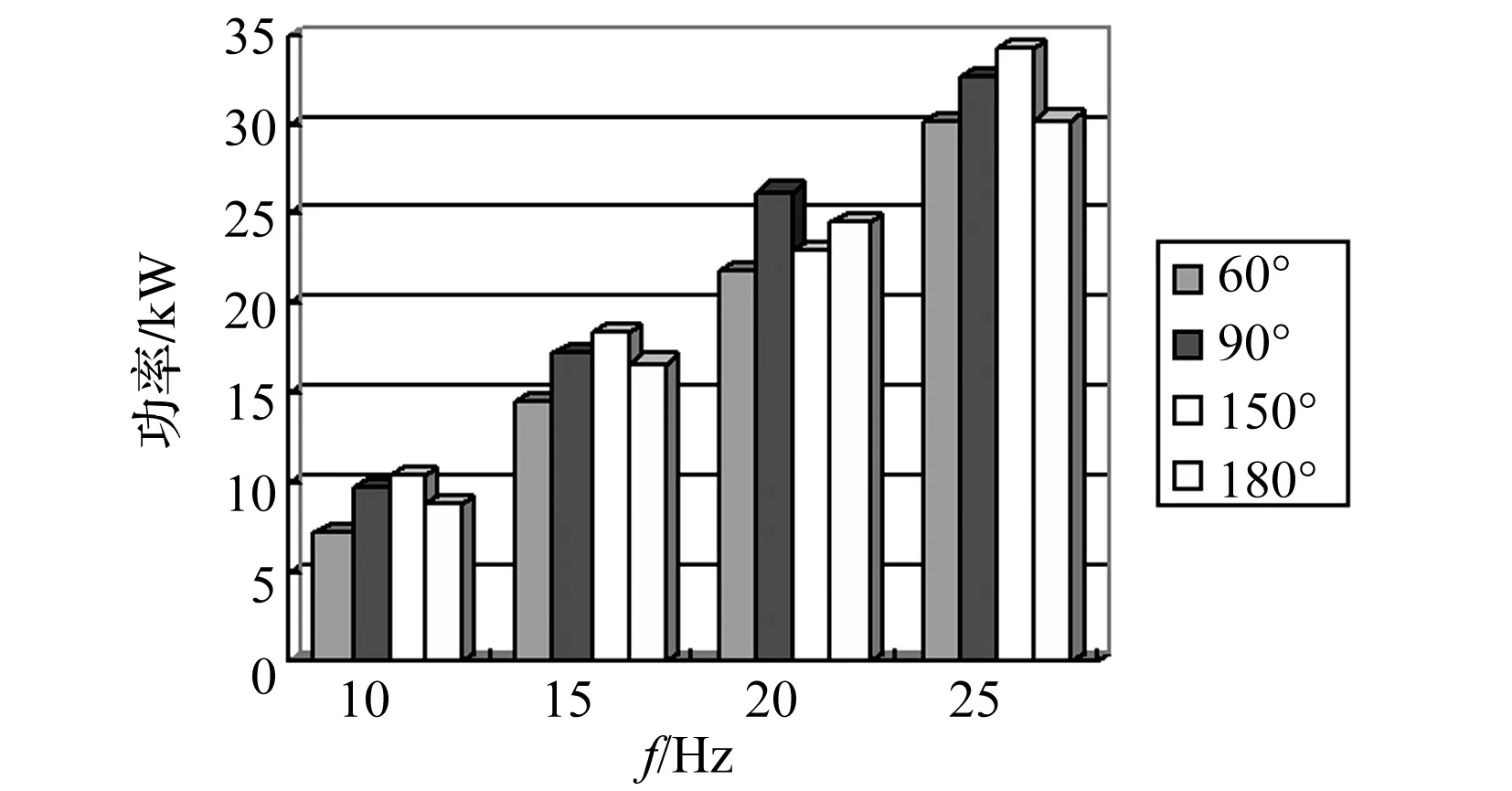
图11 不同频率和相位角下液压系统功率Fig.11 Hydraulic power with different frequency and phase
由图11可以看出,在同一相位角下,随着振捣频率的增加,双振捣机构液压系统消耗的功率也在增加,说明双振捣机构在旋转过程中产生的惯性力和惯性力矩也随振捣频率的增加而增加。在同一频率下,液压系统消耗功率随着相位角不同而改变,相位角为60°时,振捣机构 消耗功率最小,除频率20 Hz外,相位角为180°时次之,而相位角为90°和150°时,消耗功率较大,说明相位角为60°时所需驱动力矩较小。对比试验结果和仿真分析结果可知,仿真结果与实验结果基本一致,说明建立的动力学模型可以用来模拟实物的动态特性,具有一定的参考价值。
5 结 论
(1) 本文基于Pro/E和ADAMS软件建立了9.0 m摊铺机双振捣机构的多体动力学仿真模型,模拟并研究了系统的动力学特性。本文的研究为摊铺机双振捣机构的设计及施工参数的调整提供了参考依据。
(2) 与以往的简化计算模型相比,虚拟样机模型的建立完全参照实物原型机建造,考虑了各构件的空间结构与质量分布,同时可以方便的调整模型各参数进行分析实验,避免了多次建造实物样机进行实验,非常适用于复杂机械机构的分析研究。
[1] 夏锦阳.振幅可调式摊铺机熨平板振捣结构分析及调节方法[J].工程机械, 2004(8):13-15.
XIA Jinyang. An analysis and adjustment method of tampering mechanism on paver screed with adjustable amplitude[J]. Construction Machinery and Equipment, 2004(8):13-15.
[2] 任云鹏,韩清凯,张天侠. 基于虚拟样机技术的锻造操作机的动力学仿真[J]. 东北大学学报(自然科学版),2010,31(8):1170-1173.
REN Yunpeng, HAN Qingkai, ZHANG Tianxia. Dynamic simulation of forging manipulator based on virtual prototyping[J]. Journal of Northeastern University(Natural Science), 2010,31(8):1170-1173.
[3] 沈岗,向东,牟鹏,等. 风电装备整体式动力学建模与仿真分析[J]. 振动与冲击,2015,34(14):129-134.
SHEN Gang,XIANG Dong,MU Peng, et al. Integral dynamic modeling and simulation of wind turbine[J]. Journal of Vibration and Shock, 2015,34(14):129-134.
[4] 刘刚,田晋跃, 肖中宇. 摊铺机压实机构动态特性仿真[J].农业机械学报,2005,36(11):34-37.
LIU Gang, TIAN Jinyue, XIAO Zhongyu. Simulation of dynamic character of compacting mechanism of paver[J]. Journal of Agricultural Machinery, 2005,36(11):34-37.
[5] 许庆.摊铺机振捣机构的运动学分析[J]. 筑路机械与施工机械化,2006,23(3):15-19
XU Qing. Kinematic analysis of tamper mechanism for paver[J].Road Machinery & Construction Mechanization, 2006,23(3):15-19.
[6] 张新荣,赵国普,孙祖望. 沥青混凝土摊铺机熨平装置的动力学分析[J]. 西安公路交通大学学报,2001,12(1):95-98.
ZHANG Xinrong, ZHAO Guopu, SUN Zuwang. Dynamics analysis of screeding unit for asphalt paver[J]. Journal of Xi’an Highway University, 2001,12(1):95-98.
[7] LUO Tianhong, GAN Xinfu, LUO Wenjun. Nonlinear dynamics simulation of compacting mechanism with double-eccentric vibrator of asphalt-paver[C]//2010 IEEE ICICTA.2010:800-803.
[8] 葛正浩,等.ADAMS2007虚拟样机技术[M].北京:化学工业出版社,2010.
[9] 周驰,丁炜琦,桂良进,等. 一种驱动桥齿轮传动系统动力学建模与分析方法[J]. 振动与冲击,2015,34(15):188-194.
ZHOU Chi,DING Weiqi,GUI Liangjin,et al. Dynamic modeling and analysis for a drive axle gear transmission system[J]. Journal of Vibration and Shock, 2015,34(15): 188-194.
[10] 杜岳峰,朱忠祥,毛恩荣,等. 基于ADAMS的丘陵山地小型玉米收获机仿真[J]. 农业机械学报, 2011,42(11): 1-5.
DU Yuefeng, ZHU Zhongxiang, MAO Enrong. Simulation on small-scale corn harvester for hilly area based on ADAMS[J]. Journal of agricultural machinery, 2011,42(11): 1-5.
[11] 赵满全,张宁,杨铁军,等. 双圆盘割草机切割器虚拟样机设计与试验[J]. 农业机械学报,2014,45(8):101-105.
ZHAO Manquan, ZHANG Ning, YANG Tiejun, et al. Design and experiment of virtual prototype of double disc mower cutter[J]. Journal of Agricultural Machinery, 2014,45(8):101-105.
Dynamic characteristics of a paver tamper mechanism based on virtual prototyping technology
SUN Jian, HUANG Chuanhui, LI Fuxing
(Mechanical and Electronic Department, Xuzhou Institute of Technology, Xuzhou 221111, China)
When the tamper mechanism of a paver is working, the composite motion of its beam produces an impact on its flation box to herm the paving quality of road,surface. The virtual prototype model of a 9.0 m double-tamper mechanism was established and simulated with the software ADAMS .The effeit laws of vibration frequency, vibration amplitude and phase on the inertial force and inertial moment of the tamper beam were deduced.The results showed that the inertial force of the tamper beam increases greatly with increase in vibration speed, and its uniformity becomes worse; the double-tamper mechanism has a little effect on the frame of its flatiron-box when the phase angle is taken as 60°.
paver;double-tamper mechanism; virtual prototyping technology; dynamic characteristics
江苏省前瞻性联合研究项目(BY2016027-02);江苏省现代教育技术研究课题(2016-R-48399)
2015-10-28 修改稿收到日期:2016-02-04
孙健 男,博士,高级工程师,1975年生
TH
A
10.13465/j.cnki.jvs.2016.19.035
