西门子跟随误差补偿功能在数控龙门镗铣床上的应用
2016-11-23刘翔云邵振廷
刘翔云 邵振廷
(济南二机床集团有限公司,山东 济南 250022)
西门子跟随误差补偿功能在数控龙门镗铣床上的应用
刘翔云 邵振廷
(济南二机床集团有限公司,山东 济南 250022)
介绍了西门子跟随误差补偿功能的工作原理、参数设置,以及利用伺服轨迹、圆度测试等调整、优化跟随误差补偿相关参数的方法。利用跟随误差补偿功能,最大限度地减小轮廓偏差,改善加工质量,达到增大位置环增益同样的效果。
跟随误差补偿;轮廓误差;伺服轨迹;圆度测试
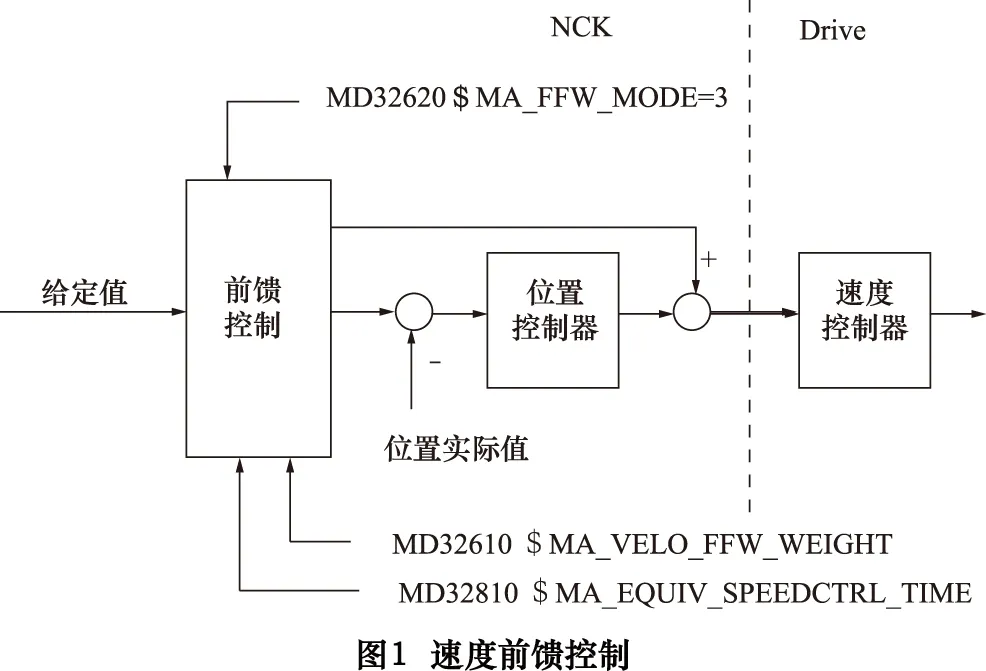
当数控龙门镗铣床的位置环增益(Kv)因各种原因无法增大时,在高速加工、圆弧插补时,会产生一个较大的跟随误差和圆度误差,影响工件的加工精度。在不增加位置环增益(Kv)的情况下,为减小加工误差,我们使用了西门子跟随误差补偿功能,又称前馈控制,提高机床加工精度。本文主要讲述速度前馈控制。
1 工作原理
西门子系统的跟随误差(following error)一般是指位置环的位置编程值和实际值之间的差值,它反映了机床动态跟随精度和静态定位精度。跟随误差和位置环增益之间关系如下:
E=V/Kv
式中:E为跟随误差;V为运动速度;Kv为位置环增益。
由上式可见,当位置环增益(Kv)确定后,跟随误差与运动速度成正比,即速度越大误差越大。数控龙门镗铣床由于受机床传动刚性、固有频率等因素的影响,其位置环增益(Kv)无法达到较大值,因此当高速加工时会产生较大的跟随误差,降低机床加工精度。在不增大位置环增益的情况下,为减小上述误差,西门子提供了跟随误差补偿功能(Fllowing error compensation),又称前馈控制(Feedforward control),通过该功能可将跟随误差降到接近于零,达到增大位置环增益同样的效果。西门子前馈控制有两种,一种是扭矩前馈控制,一种是速度前馈控制,大部分是采用速度前馈控制,本文主要阐述速度前馈的调试及优化。其工作原理如图1。
2 跟随误差补偿功能的生效方式
跟随误差补偿的生效方式,可以通过参数 MYMMA_FFW_ACTIVATION_MODE,设为总是有效或者通过程序指令选择有效,通常选择通过编程指令选择有效。
跟随误差补偿生效方式:
MD32630 MYMMA_FFW_ACTIVATION_MODE = 0 ;前馈控制总是有效
= 1 ;在程序中用指令选择是否有效
编程指令: FFWON/FFWOFF 跟随误差补偿生效/无效;
MD20150【23】=2 通道复位后生效
3 跟随误差补偿功能的参数设置及优化
注:在使用跟随误差补偿功能之前,各机床轴的位置环、速度环、电流环需经过优化。
3.1 跟随误差补偿功能的相关参数
MD32610 VELO_FFW_WEIGHT
MD32620 MYMMA_FFW_MODE;前馈控制方式 3:速度前馈 4:扭矩前馈
MD32630 MYMMA_FFW_ACTIVATION_MODE;前馈生效方式
MD32810 MYMMA_EQUIV_SPEEDCTRL_TIME;速度环等效时间常数
3.2 速度环等效时间常数的调整与优化
速度前馈控制中唯一需要优化调整的参数是速度环等效时间常数MD32810 MYMMA_EQUIV_SPEEDCTRL_TIME。调整、优化该参数最简便的方法就是做位置环阶跃响应的特性,利用伺服轨迹测量位置给定值和位置实际值之间的差值(特别是在位置实际值到达目标值前20 μm的特性),根据轴的定位特性,将其调整、优化至最佳值。为获得良好的补偿效果,必须将MYMMA_EQUIV_SPEEDCTRL_TIME准确地设置在机床数据中,该值越小速度前馈控制的作用越强。
(1)测试程序(以X轴为例)
在【Auto.】或【MDA】方式下,选择执行下述程序:
FFWON
SOFT
LAB:
G01 X210 Fxxxx ; 轴的最大进给速度
G04 F0.5
MYMAA_SCTRACE[X]=1 ;trigger for servo trace
X260
G04 F0.5
GOTOB LAB
M30
(2)测试方法
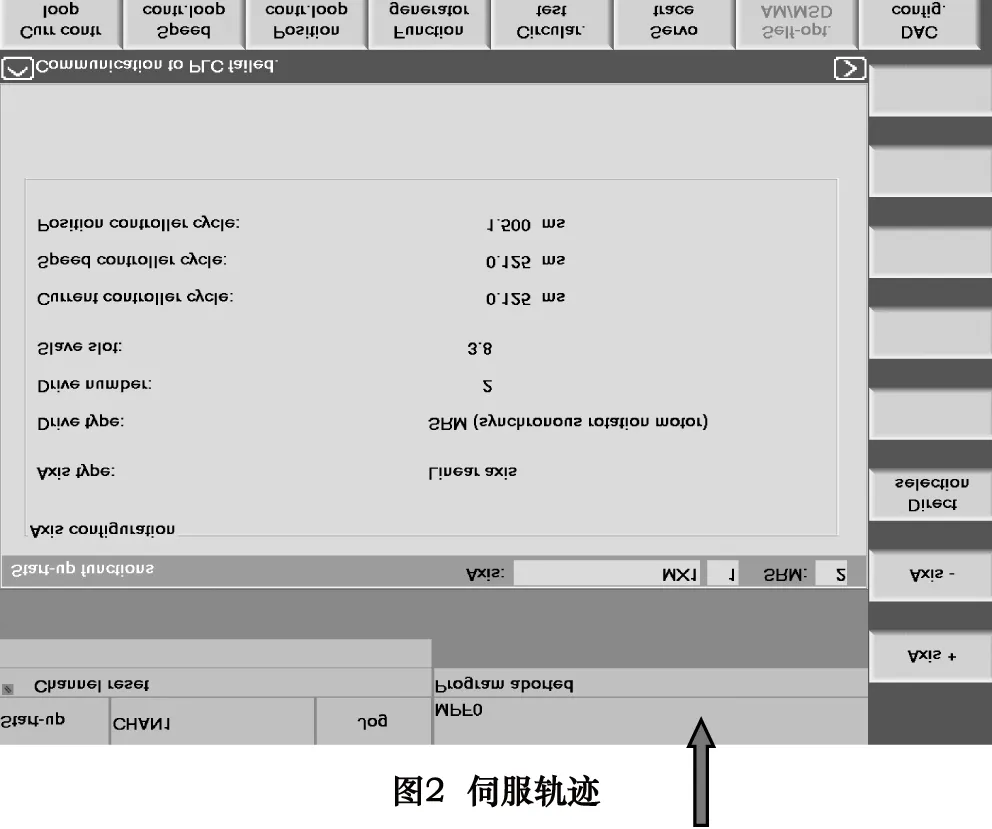
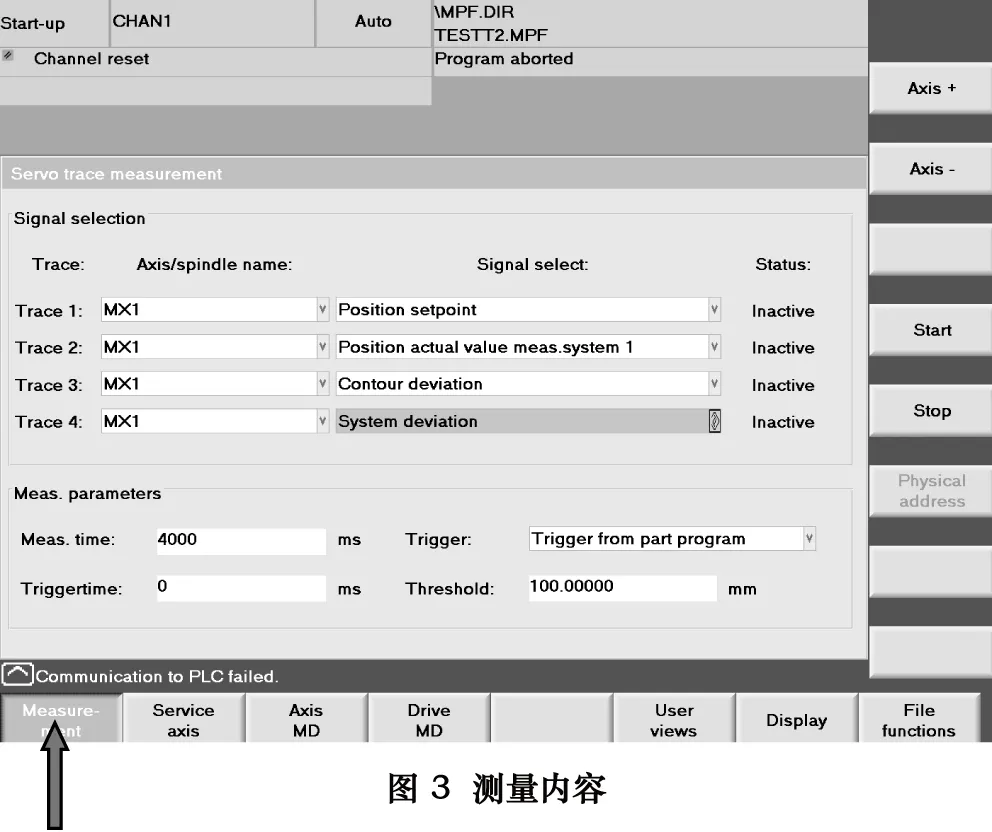
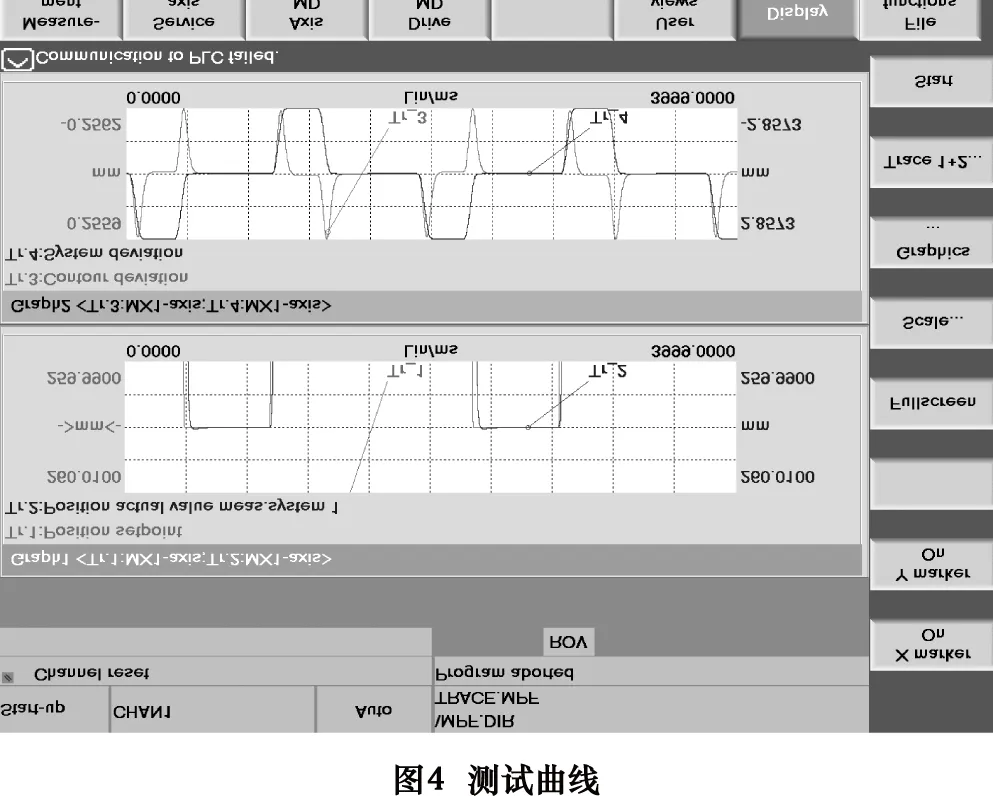
利用伺服轨迹功能(如图2),选择“测量”输入测量内容(如图3),按【NC Start】键,执行程序和测量,根据测试曲线(如图4),分析机床轴的定位特性,调整参数MYMMA_EQUIV_SPEEDCTRL_TIME。
(3)位置环阶跃响应曲线的分析与参数优化(以X轴为例)
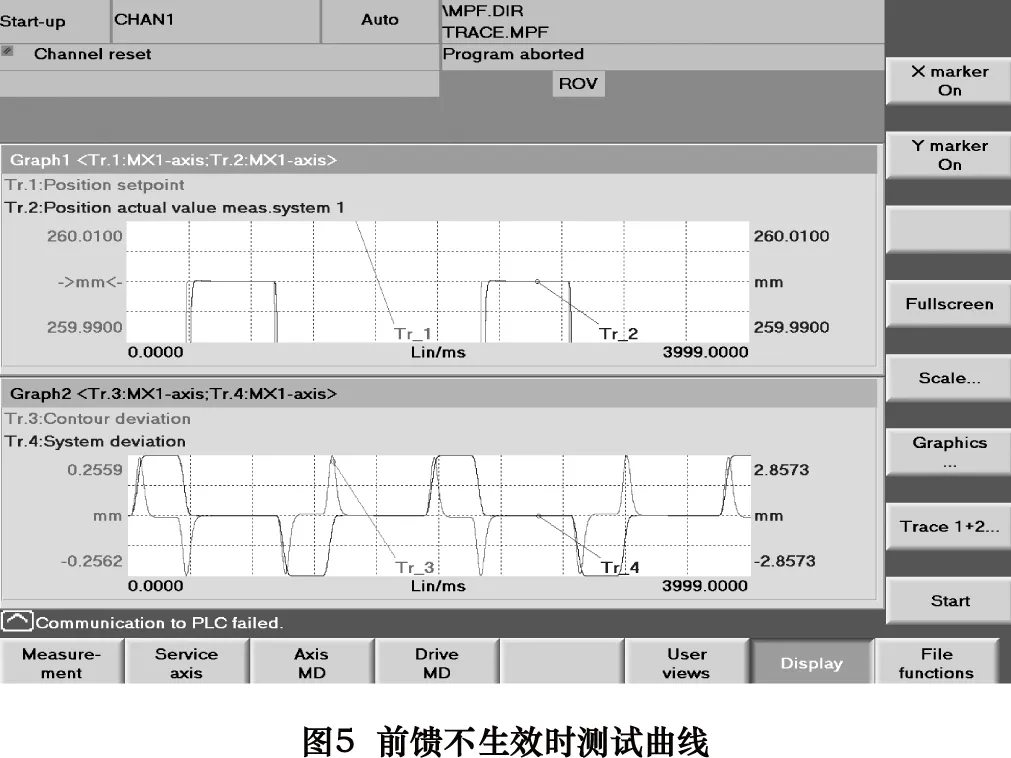
在速度前馈不生效状态下,测量轴的位置实际值、编程值、轮廓误差和系统误差,如图5。
MD 32620 MYMMA_FFW_MODE 0
MD 32810 MYMMA_EQUIV_SPEEDCTRL_TIME 0.0
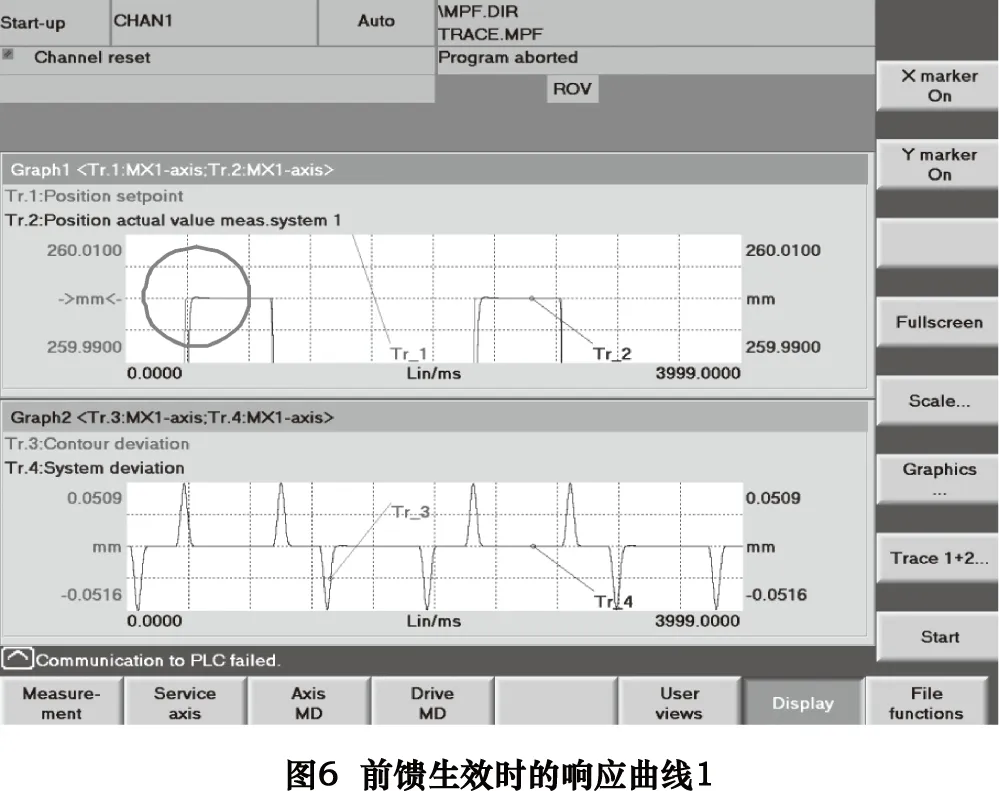
激活速度前馈控制,测试轴的位置实际值、编程值、轮廓误差和系统误差。
参数设置:
MD 32610 VELO_FFW_WEIGHT 1.0
MD 32620 MYMMA_FFW_MODE 3
MD 32810 MYMMA_EQUIV_SPEEDCTRL_TIME 0.0025
MD 32431 MYMMA_MAX_AX_JERK 80
测试曲线如图6所示,当轴移动到目标位置前,定位成爬行状态,说明MD 32810 MYMMA_EQUIV_SPEEDCTRL_TIME 设定值过大,应减小。
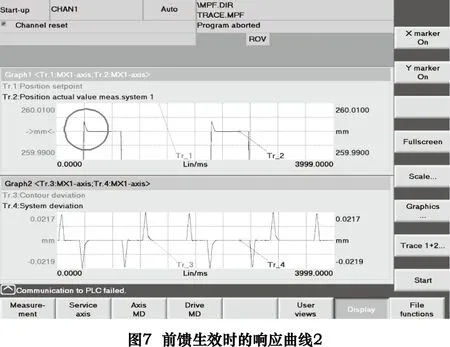
参数设置:
MD 32610 VELO_FFW_WEIGHT 1.0
MD 32620 MYMMA_FFW_MODE 3
MD 32810 MYMMA_EQUIV_SPEEDCTRL_TIME 0.0018
MD 32431 MYMMA_MAX_AX_JERK 80
测试曲线如图7所示,当轴移动到目标位置前,有位置超调现象,说明MD 32810 MYMMA_EQUIV_SPEEDCTRL_TIME 设定值过小,应增大。
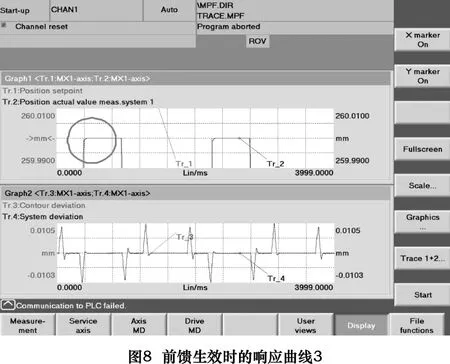
参数设置:
MD 32610 VELO_FFW_WEIGHT 1.0
MD 32620 MYMMA_FFW_MODE 3
MD 32810 MYMMA_EQUIV_SPEEDCTRL_TIME 0.002
MD 32431 MYMMA_MAX_AX_JERK 80
测试曲线如图8所示,当轴移动到目标位置时,无超调和爬行现象,说明MD 32810 MYMMA_EQUIV_SPEEDCTRL_TIME优化至最佳状态。
按照上述步骤,逐次优化机床各插补轴的速度环等效时间常数,然后取各插补轴 MYMMA_EQUIV_SPEEDCTRL_TIME 的最大值,设为各插补轴速度环等效时间常数。
注:所有插补轴上述参数应设置成相同值,否则在执行圆弧插补时,会导致圆度变成椭圆。
4 圆度测试
将速度前馈控制优化调整后,需使用圆度测试功能,在前馈控制功能生效的状态下,对插补轴的动态特性进行分析和评估。
例:以XY轴为例
4.1 测试程序
FFWON ; 激活前馈控制
SOFT
G17 ; 选择XY平面
G91 ; 增量
G02 I10 J0 F5000 TURN=30 ; R=10mm V=5000mm/min 重复执行30次
M30
4.2 测试结果
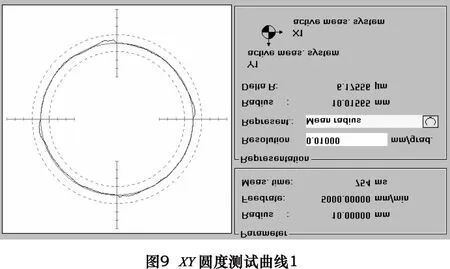
前馈控制功能生效后,做圆度测试时,通常圆的实际半径会过大(如图9),此现象可通过调整动态匹配响应时间MYMMA_DYN_MATCH_TIME或加加速滤波器时间常量MD32410 MYMMA_AX_JERK_TIME参数进行修正。
(1)通过优化动态匹配时间常数,修正圆度的大小
X Y
32200 POSCTRL_GAIN 3.2 3.2
32610 VELO_FFW_WEIGHT 1.0 1.0
32620 FFW_MODE 3 3
32810 EQUIV_SPEEDCTRL_TIME 0.002 0.002
32900 DYN_MATCH_ENABLE 1 1
32910 DYN_MATCH_TIME 0.0062 0.0062
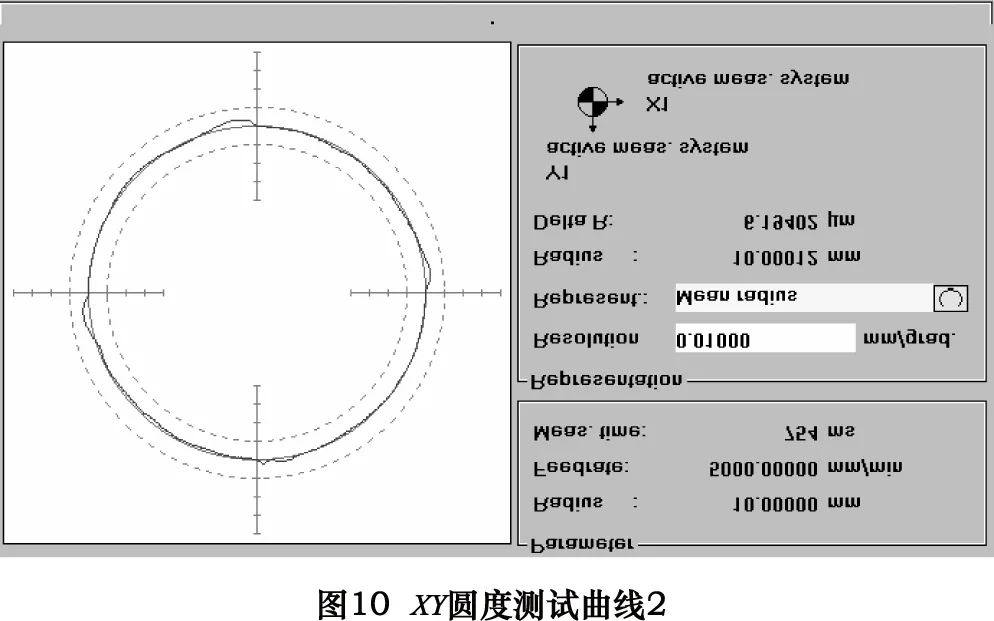
通过参数 MYMMA_DYN_MATCH_ENABLE 激活动态匹配功能,并根据圆度测试的结果优化调整 MYMMA_DYN_MATCH_TIME 动态匹配时间常数的大小,直至圆的实际半径与编程半径的差在精度要求范围之内,如图10。
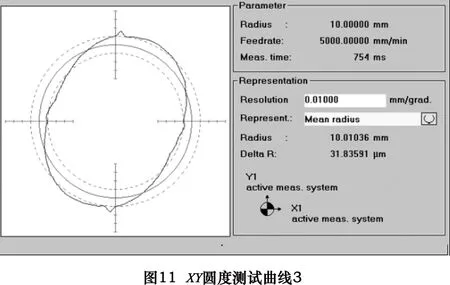
所有插补轴的动态匹配时间常数MYMMA_DYN_MATCH_ENABLE 应设置为相同数值,如果不同则影响圆周形状,如图11。
X Y
32200 POSCTRL_GAIN 3.2 3.2
32610 VELO_FFW_WEIGHT 1.0 1.0
32620 FFW_MODE 3 3
32810 EQUIV_SPEEDCTRL_TIME 0.002 0.002
32900 DYN_MATCH_ENABLE 1 1
32910 DYN_MATCH_TIME 0.0035 0.0037
(2)通过调整轴冲击限制滤波器时间常数MD32410 MYMMA_AX_JERK_TIME,修正圆的大小
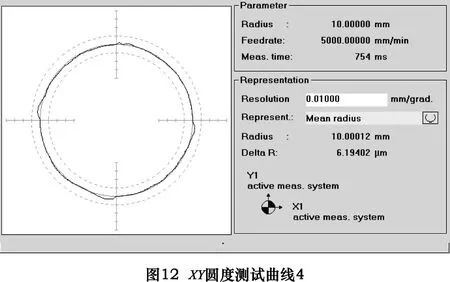
通过参数MYMMA_AX_JERK_ENABLE激活加速度变化率时间,并选择加速度变化率模式MYMMA_AX_JERK_MODE,建议使用32402 AX_JERK_MODE=2,执行上电复位操作,激活上述设置。执行圆度测试程序,根据测试结果优化参数MYMMA_AX_JERK_TIME的大小,调整圆实际大小至要求的精度范围内。如图12。
X Y
32200 POSCTRL_GAIN 3.2 3.2
32610 VELO_FFW_WEIGHT 1.0 1.0
32620 FFW_MODE 3 3
32810 EQUIV_SPEEDCTRL_TIME 0.002 0.002
32900 DYN_MATCH_ENABLE 0 0
32400 AX_JERK_ENABLE 1 1
32402 AX_JERK_MODE 2 2
32410 AX_JERK_TIME 0.023 0.023
如果插补轴的加速度变化率时间设置不同,则圆周形状会受到影响,如图13。
X Y
32400 AX_JERK_ENABLE 1 1
32402 AX_JERK_MODE 2 2
32410 AX_JERK_TIME 0.023 0.025
5 结语
通过使用西门子840D数控系统的跟随误差补偿功能,使笔者公司生产的3 m×6 m数控定梁龙门镗铣床加工模具时,在圆弧、拐角等加速度发生变化的地方,轮廓偏差减小了0.03~0.05 mm,达到增大位置环增益的相同效果,改善了加工质量,满足了机床的精度及加工要求。
[1]西门子,Optimization of the feedforward control[Z].
[2]西门子.CN_840D sl调试文档V45_201404[Z].
(编辑 李 静)
如果您想发表对本文的看法,请将文章编号填入读者意见调查表中的相应位置。
Application of Siemens following error compensation in the gantry type CNC boring-milling machine
LIU Xiangyun, SHAO Zhenting
(Jier Machine-Tool Group Co.,Ltd., Ji’nan 250022, CHN)
This article introduces the principle and parameter setting of Siemens following error compensation, and the adjustment and optimization of following error compensation parameters using thee servo trace and circularity test function.Use following error compensation, reduce the contour error to maximum limit, improve the processing quality, to gain the same effect as improving the position loop.
following error compensation; contour errors; servo trace; circularity test
TG659
B
10.19287/j.cnki.1005-2402.2016.11.032
2016-07-05)
161139
