基于模糊贝叶斯网络算法的智能轮椅避障
2016-11-23贾松敏王成富
贾松敏, 王成富, 徐 涛, 张 鹏
(1.北京工业大学 电子信息与控制工程学院,北京 100124;
2.北京工业大学 计算智能与智能系统北京市重点实验室,北京 100124;
3.北京工业大学 数字社区教育部工程研究中心,北京 100124)
基于模糊贝叶斯网络算法的智能轮椅避障
贾松敏1,2,3,王成富1,2,3,徐涛1,2,3, 张鹏1,2,3
(1.北京工业大学电子信息与控制工程学院,北京100124;
2.北京工业大学计算智能与智能系统北京市重点实验室,北京100124;
3.北京工业大学数字社区教育部工程研究中心,北京100124)
对传统BP神经网络模糊逻辑的智能轮椅避障方法在训练过程中存在的过拟合和避障路径不够优化的问题,提出了一种模糊贝叶斯网络避障算法以降低神经网络的复杂度;该算法利用模糊神经网络对隶属度函数的参数进行自主学习调整,同时为增强神经网络的泛化能力和计算能力,在网络目标函数中加入权衰减项,利用贝叶斯原理优化神经网络的结构和权值;仿真和实机实验表明,该算法在训练结果和避障效果上均优于传统BP神经网络,提高了智能轮椅避障的实时性,优化了避障路径,可满足用户对智能轮椅安全性和舒适性的需求。
智能轮椅;贝叶斯网络;避障;超声波传感器
为提高残障人士和老年人生活质量,多功能智能轮椅的社会需求日益增长[1]。在智能轮椅的设计中,自主避障起着非常重要的作用,它保障了轮椅运行中的安全性。对于老年人和残疾人,他们活动的区域多为医院等未知环境,轮椅在需要避开周围环境中的障碍物的同时还需要接近目标。作为人类运动的一种辅助系统,智能轮椅在运动过程中,其运行路径应该是平滑的,运行过程应该满足舒适性的要求。智能轮椅实质是一种特殊的机器人系统,其控制算法的优良及智能化程度决定着乘用者的安全性,智能轮椅避障的研究时该领域的热点问题[2]。
近年来,很多学者均对轮椅避障的问题展开了研究。Bourhis[3]采用全局路径规划的方法导航避障。Parikh[4]在机器人运动过程中利用人工势场法避障。MengWang[5]在机器人导航中把栅格地图和模糊逻辑相结合,利用最小危险性评价的标准,改善了路径规划的效果。文献[6]提出的利用动态变化权重的避障算法对移动机器人避障,利用动态改变子行为函数的优先级与权重的方法实时获取当前时刻最有效路径,改善避障导航中的安全性和平滑性。文献[7]将生存理论应用于轮式移动机器人的反应式避障控制,提高了轮式机器人高速避障控制的有效性。文献[8]中利用模糊神经网络对智能轮椅路径进行规划,同时利用仲裁机制和命令融合机制的算法,提高了智能轮椅控制精度。文献[9]利用遗传理论算法对其建立的BP神经网络结构优化,对局部极小值的问题改进,以到达避障的目的。文献[10-11]利用神经网络的学习功能对模糊神经网络的参数进行学习,改善了模糊控制系统的性能和机器人的避障效果。文献[12]提出基于速度修正项的机械臂避障路径规划方法,保证机械臂在特定时刻到达指定构型的前提下能够顺利实现障碍回避。文献[13]对无人驾驶车辆在路径生成过程中增加误差影响,用通行区域代替原有不具有宽度的规划路径进行避障,展现了较好的避障能力。
上述研究所提导航避障算法通常针对采用普通双轮差动轮的智能轮椅,同时对传统BP神经网络在训练过程中存在过拟合等问题未能提出较好的解决方案。本文采用的基于麦克纳姆全向轮的智能轮椅,以实现前行、横移、斜行、旋转及其组合等运动方式。当障碍物在乘坐者视野外时也可以利用超声波传
0 引言
感器采集外界障碍物的距离信息,从而使智能轮椅实现安全平稳避障。利用模糊神经网络的学习功能对隶属度函数的参数进行学习调整,将表示网络结构复杂性的惩罚项引入到网络目标函数中,并利用贝叶斯方法对神经网络的权值和网络模型进行优化从而降低网络训练过程中的复杂性,避免网络训练过程中过拟合的问题,提高神经网络的泛化能力以及全向智能轮椅的避障效果。
1 模糊神经网络结构
一种改进的神经网络的结构如图1所示,表示一组输入变量和输出变量之间的非线性功能映射。该网络共3层,分别为输入层、隐藏层和输出层,层与层间的连接方式采用全互接,即某层中的每一个神经元都与相邻层所有神经元存在连接关系。
第1层为神经网络的输入层,该层的作用是对网络外部的信息接收。5维输入变量U={dl,df,dr,θ,v},其中u1=dl,u2=df,u3=dr,u4=θ,u5=v,分别表示左侧、中间、右侧障碍物距离值,轮椅速度的方向角和轮椅速度的大小,共有5维输入量,节点数为5。

图1 神经网络结构示意图
2 贝叶斯网络优化策略
神经网络的泛化能力与网络结构和训练样本的特性密切相关,可利用合适的训练策略和对网络结构优化提高神经网络的泛化能力[14]。贝叶斯方法可对输入样本信息作出推断,对正规化系统的和数据的选择提供了较为客观的方法。本文针对传统BP神经网络训练过程中的过拟合、网络泛化能力不强的问题,利用贝叶斯方法对神经网络参数进行优化。
2.1网络权值的贝叶斯学习
贝叶斯方法是满足一致性的有效归纳推理方法,它着眼于在整个权空间中权值的概率分布。在缺乏数据样本时,它的分布为一个先验分布p(ω),其中ω=(ω1,ω2,...ωW),W为网络权值(包括阈值)的总个数。有数据样本D后的分布是后验分布p(ω|D),根据贝叶斯规则有

其中,p(D|ω)为似然函数,分母p(D)是一个归一化因子,即

特别地,观测到训练数据D后,在网络结构H中,权值ω的后验分布可通过贝叶斯定理来计算。

训练样本所包含的信息内容通常不够充分地由自身唯一地重构出未知的输入输出映射,在学习中会出现过拟合的问题,本文采用正则化方法来对所建立的神经网络模型优化,它是对神经网络的训练性能函数进行修正来提高其泛化能力。
神经网络的总误差函数:F(W)=αJW+βJD(4)
其中:JD是网络的误差函数,JW是权衰减项,α和β、分别为超参数,控制着其他参数(权及阈值)的分布形式,其值的大小对神经网络的训练目标起决定作用。
采用贝叶斯方法实现超参数的选择,超参数α,β的后验概率分布为:

式中,p(α,β|D,H)为超参数的先验概率;p(D|H)是归一化因子;p(D|α,β,H)为显著度。
求解时,对α和β分别求偏导,以求出具有最大显著度时超参数的值。
式中,γ的取值范围为0至W,表示网络中可以降低性能指标函数的参数个数;而WMP是在总误差函数F(W)最小时对应的权值和阈值组。如果样本数N很大,满足N≽W ,可认为γ =W。
在实际应用时,需要找到αMP,βMP的最优值以及最优的权值WMP,本文中用迭代训练法求WMP,并且周期性地更新αMP和βMP,更新公式为

求出使显著度p(D|α,β,H)最大的α,β后,用高斯分布来近似P(D|α,β,H)的分布形式,在这里用lnα,lnβ代替α,β,且α,β不相关。对于β

可得出此分布的方差为

同理对于α,可求出对lnα分布的方差为

用贝叶斯方法求出网络的最优权值,估计网络的最可能输出及相应误差范围,从而对神经网络的权值进行优化。
2.2贝叶斯模型的选择
假定神经网络由一组模型Hi,由贝叶斯定理可得给定数据后模型的后验概率

其中:p(Hi)为模型Hi的先验概率,p(D|Hi)称为模型的显著度,为求出它的最大值,可以先将p(D|Hi)写成下式:
p(D|Hi)=∬p(D|α,β,Hi)p(α,β|Hi)dαdβ(13)
用高斯分布近似p(D|α,β,Hi),对α,β进行积分处理后,为方便求解,对p(D|Hi)取对数得

其中A是网络误差F(W)的Hessian阵,M为网络的隐单元数,由于网络的对称性,可能有2MM!个不同权的组合会产生同一结果。
考虑到一些非等价的局部最小点,其后验分布用一组中心位于各极小点的互不交叠高斯分布的组合代表,权的后验分布为
p(ω|D)=∑ip(mi,ω|D)=∑i
p(ω|miD)p(mi|D)
(15)
其中,mi代表各不同极小点及其对称的等价点。这样,一组网络的平均输出为

其中,x是给定输入向量,Γi是权空间中包围i局部极小点的权区域,是第i网络在该区域的平均输出,由上式可知总输出是各网络输出的线性组合,加权值是各中心的后验概率。
上述结论可扩展到不同模型Hi的组合,各模型可以是不同结构的网络,各单个模型输出的线性组合为网络的输出。本文是根据后验概率的大小选择最可能的输出作为结果。
下面给出用贝叶斯方法确定网络权值和选择网络模型的步骤:
①对超参数α与β的初始值选择,根据先验分布对网络的权赋初值。
②用BP算法训练网络以使总误差函数最小。
③训练中更新α与β的值,并计算γ的值。
④对不同起始权值重复①~③步,以发现有差别的极小点。
⑤对不同模型重复①~④步,检验模型的显著度。
利用贝叶斯方法分别对网络权值和网络模型进行优化,降低训练过程中的复杂性,增强了网络的泛化能力。
3 仿真与实验结果
为了验证本文算法在智能轮椅避障中的有效性,本文分别在仿真平台和真实环境中进行了实验。
3.1网络训练结果
利用提出的算法对模糊神经网络进行训练,采集并选取典型环境下的400个样本对神经网络进行训练,经过模糊贝叶斯神经网络和利用传统BP网络对数据训练的结果如图2所示。由图可知,利用贝叶斯神经网络算法后能提高神经网络训练过程的计算效率,减少计算时间。样本数据处理后,模型误差值经过89次迭代收敛0.78,利用传统BP神经网络处理的原始数据则经过350次迭代后模型误差值趋于收敛至1.52。由实验数据可知,无论是求解精度还是收敛速度上,采用贝叶斯网络处理后的算法均优于原始算法。
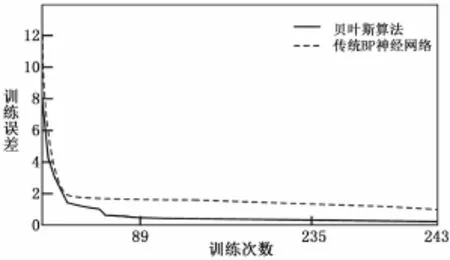
图2 两种方法训练对比
表1是在相同的网络拓扑结构和学习参数下,用BP网络和模糊贝叶斯网络对同样的训练样本和测试样本的识别结果。表1中数据表明,对于不同的样本模糊贝叶斯网络的训练误差均小于BP网络。样本在一定数目变化时,模糊贝叶斯网络能获得比较高的精度,同时在网络性能函数中利用正则化理论增加表示网络复杂度的网络权值平方和项和有效参数,对网络泛化能力有所提高。

表1 均方误差对比
对不同样本数的训练时间,传统BP神经网络与贝叶斯网络也有比较大差别。在训练样本数为30个时,两者算法求解时间相近。当样本数达到100后,在训练时间上,贝叶斯网络算法的性能优势体现较为明显,随着样本数的继续增加,贝叶斯网络的性能优势体现更加明显。具体训练时间对比如表2。
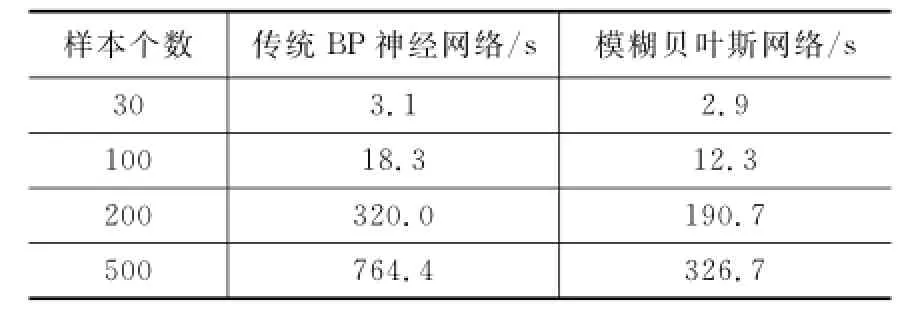
表2 训练时间对比
3.2仿真结果
本文在三维机器人仿真平台Webots上面对所提算法进行避障仿真,如图3所示。其中圆柱体、长方体等为设定的障碍物。
3.3实机实验结果
为了验证模糊贝叶斯神经网络在全向轮椅避障中的应用,在真实环境中进行了实验,如图4所示。实验环境中选取如图4所示路锥和纸箱作为智能轮椅运动过程中的障碍物。

图3 仿真避障实验结果对比

图4 真实环境中的避障实验结果对比
4 结论
本文针对传统的BP神经网络算法在训练过程中出现的过拟合等问题,提出一种基于模糊贝叶斯神经网络的算法。与传统的BP神经网络相比较,模糊贝叶斯神经网络结合了模糊神经网络和贝叶斯网络的优点,具有神经网络良好的非线性逼近能力和贝叶斯后验概率的真实性,减少了计算成本,提高了系统的稳定性。实验结果表明,模糊贝叶斯神经网络应用于全向智能轮椅避障中,对避障的效果有显著改善,优化了避障路径,提高了全向智能轮椅避障的实时性,满足用户的舒适性和安全性的要求,可广泛用于了智能轮椅避障中。
[1]Roziana Ramli,Hamzah Arof,Fatimah Ibrahim and etc.Using finite state machine and a hybrid of EEG signal and EOG artifacts for an asynchronous wheelchair navigation[J].Expert Systems with Applications,2015,42:2451-2463.
[2]Simpson R C.Smart wheelchair:a literature review[J].Journal of Rehabilitation Research&Development,2005,42(4):423-436.
[3]Bourhis G,Horn O,Habert O,et al.An autonomous vehicle for people with motor disabilities[J].IEEE Robotics and Automation Magazine,2001,8(1):20-28.
[4]Parikh S P,Grassi V,Kumar V and etc.Integrating human inputs with autonomous behaviors on an intelligent wheelchair platform[J].IEEE Intelligent System,2007,22(2):33-41.
[5]Meng Wang,James N K.Liu.Fuzzy logic-based real-time robot navigation in unknown environment with dead ends[J].Robotics and Autonomous Systems,2008,56:625-643.
[6]杨晶东,杨敬辉,蔡则苏.基于多目标优化的移动机器人避障算法[J].上海交通大学学报,2012,2(2):213-216.
[7]刘磊,高岩,吴越鹏.基于生存理论的非完整约束轮式机器人高速避障控制[J].控制与决策,2014,29(9):1623-1627.
[8]蒲兴成,张军,张毅.基于神经网络的改进行为协调控制及其在智能轮椅路径规划中的应用 [ J].智能系统学报,2011,6(5):456-463.
[9]李鹏英,冯雅丽,张文明,等.基于GA-BP神经网络的深海集矿机避障系统[J].中南大学学报(自然科学版),2010,41(4):1374-1378.
[10]Mohanty,Prases K,Parhi,Dayal R.Navigation of autonomous mobile robot using adaptive network based fuzzy inference system[J].Journal of Mechanical Science and Technology,2014,28:2861-2868.
[11]Meng Joo ER,Chang Deng.Obstacle avoidance of a mobile robot using hybrid learning approach[J].IEEE Transactions on Industrial Electronics,2005,52(3):898-905.
[12]陈钢,叶佩昌,贾庆轩,等.基于速度修正项的机械臂避障路径规划[J].控制与决策,2015,30(1):156-160.
[13]姜岩,王琦,龚建伟,等.无人驾驶车辆局部路径规划的时间一致性与鲁棒性研究[J].自动化学报,2015,41(3):518-527.
[14]马湧,孙彦广.贝叶斯神经网络在蒸气管网预测中的应用 [J].中国冶金,2014,24(6):53-57.
Obstacle Avoidance System for Intelligent Wheelchair Based on Fuzzy Bayesian Neural Network
Jia Songmin1,2,3,Wang Chengfu1,2,3,XuTao1,2,3,Zhang Peng1,2,3
(1.College of Electronic and Control Engineering,Beijing University of Technology,Beijing100124,China;2.Beijing Key Laboratory of Computational Intelligence and Intelligent System,Beijing100124,China;3.Engineering Research Center of Digital Community,Ministry of Education,Beijing100124,China)
To solve the over-fitting problem caused by traditional obstacle avoidance method of intelligent wheelchair based on fuzzy logic during training process and the obstacle avoidance path is not optimized,we propose a new obstacle avoidance algorithm to reduce the complexity of the neural network in the training process with fuzzy Bayesian network.Fuzzy neural network is utilized to adjust parameters of membership functions.In order to obtain the ability of good generalization and accurate computing,a penalty term is introduced to the objective function to optimize the structure and the weights of neural networks using Bayesian method.Simulation and physical experiments show that this algorithm is better than the traditional BP network in the training process and the obstacle avoidance path is optimized to meet the users'needs of the comfort and security better.
intelligent wheelchair;Bayesian neural network;obstacle avoidance;ultrasonic sensors
1671-4598(2016)05-0153-03
10.16526/j.cnki.11-4762/tp.2016.05.044
TP242
A
2015-10-28;
2015-12-04。
国家自然科学基金项目(61175087)。
贾松敏(1964-),女,北京人,教授,主要从事模式识别和智能系统方向的研究。
