基于嵌入式系统的农产品智能出库设备的设计
2016-11-23杜晓伟范蓓蕾钱建平
杜晓伟,范蓓蕾,钱建平,陈 波,冯 浩
(1.北京农业信息技术研究中心,北京 100097;2.中国农业科学院 农业资源与农业区化研究所,北京 100081;3.天津科技大学 电子信息与自动化学院,天津 200064)
基于嵌入式系统的农产品智能出库设备的设计
杜晓伟1,范蓓蕾2,钱建平1,陈波1,冯浩3
(1.北京农业信息技术研究中心,北京100097;2.中国农业科学院农业资源与农业区化研究所,北京100081;3.天津科技大学电子信息与自动化学院,天津200064)
农产品出库是连接仓储与物流的重要环节,目前农产品出库操作粗放、信息无法跟踪、智能程度不高;结合嵌入式ARM系统与Windows系统的优势,对出入库中小包装条码扫描,大包装与小包装之间的信息核查,将大小包装信息不符的剔除出去,大小包装吻合的通过升降皮带的传输运送到转载车上等的研究,设计具备传输装置、出库产品条码扫描装置、剔除装置、显示控制装置的农产品出库设备,提出核心部件控制流程,实现了订单核查、产品剔除、传输控制等上位机软件功能;测试表明该设备精确实现移动装卸货与货车的无缝对接,能很好检查出错订单,提高出库过程的智能化程度。
农产品出库;二维码扫描识读;快速订单核查;红外传感器感应;嵌入式系统
0 引言
出库是农产品供应链的重要环节,也是衔接生产与流通的核心环节。现多采用普通传送装置进行衔接,但这些装置只是简单的传送,不能进行智能化处理,从而导致信息不能有效关联,信息流与物流脱节,影响产品跟踪与追溯。
随着嵌入式系统的发展,尤其是具有抢占式多任务实时操作系统的ARM嵌入式系统,其包含实时内核、任务管理、时间管理、任务间通信同步功能。系统可以使各个任务独立工作,互不干涉,实时且无误执行,使应用程序的设计过程大为减化;其次,由于嵌入式系统的资源及存储相对有限,研究中所涉及的农产品智能出入库设备需要处理较多的产品及订单数据,单纯利用嵌入式系统的资源不容易满足开发设计的需求,因此采用嵌入式ARM系统与Windows系统相结合的原则,对电机和气缸等直接操作的IO口设备的,采用下位机嵌入式ARM系统开发的原则,利用上位机Windows系统进行数据库和界面软件的开发。从结构、控制流程和功能等方面对农产品智能出库系统进行设计,进行初步应用测试。
1 结构设计
农产品出库一般根据订单所要求的产品进行处理,需要进行订单及产品匹配。对核查正确的订单进行装车,发货;对订单出现不匹配的包装进行剔除,重新检查核对的操作[1]。为了实现此阶段的高效,便捷的操作,系统可以分为上位机系统和下位机系统进行设计开发研究,上位机主要包括工控机,二维码扫描头,和打印输出模块。工控机选用型号诺威世纪10.4寸触摸屏工控机,系统为Windows系统,便于上位机软件的开发,桌面上位机的出库订单应用软件开发语言使用C#。下位机包括以ARMcortex11为核心处理器的控制单位,220 V交流步进电机和220 V伺服电机,以及气缸剔除部分。开发实现利用工控机与基于ARM嵌入式系统开发的移动装卸货设备与系统。总体结构功能图如1所示。
系统设备利用触摸屏工控机和嵌入式ARM系统进行出库的智能化操作,自动扫描大包装上的二维码信息,与上位机出库软件的数据库进行订单核查,实现各个物品与整个包装一一对应,利用工控机外加外部电路设备,进行对整个设备中的电机进行控制,实现包装箱的剔除,上升,下降等运输,核查正确的订单方便快捷的传送到运输车辆上[2]。因此系统主要包括了工控机的上位机软件,控制电机等外部输入输出设备的下位机嵌入式系统的软件,上位机和下位机之间可以进行信息交互,下位机采用核心处理器为ARM cortex的高速处理芯片,能够满足接收上位机发来的实时信号,实时的执行相应的操作。系统的总体设计包括,包装箱上条码信息的采集,包装箱上信息与包装箱内部各个小包装之间的信息匹配,订单的核查与打印。基于上述功能整体的结构框架如2所示。
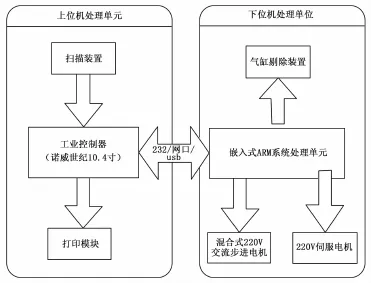
图1 总体功能结构
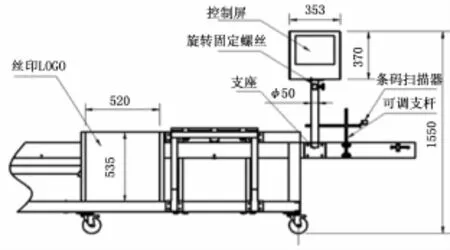
图2 结构框架
其中在距离设备初始位置1.5米处放置可调节的二维码扫描头,用来扫描大包装上二维码信息,在实际操作过程中各个批次的包装会有所不同,因此在大包装上贴二维码的位置也会有所不同,但是对同一批次的包装,二维码标签的会在同一高度的范围内[3]。因此扫描头会根据批次不同进行扫描头高度的调整,在多次实验测试过程中发现,二维码的扫描可以在一定范围内即可实现对扫描信息获取。工控机和打印机放在一个密闭的铁皮壳子中,既与整个设备连接,又能支撑在地面,与设备整体连接方便整个设备的整体移动,支撑在地面是为了避免传送带在运动过程中产生的震动对工控机和打印机产生的晃动。嵌入式ARM系统控制硬件设备,放在整个设备正下方。
1.1传输装置
系统传输装置设计有上升和下降功能,尤其是设备上升的高度,在实际使用过程中上升的高度与货车在一定的范围有利于货物的装卸,在传输装置的末端上安装有红外传感器,当传输装置上升到能够检测到货车打开的后盖时,进行减速操作。驱动上升和下降用直流步进电机来进行,ARM核心控制单元控制步进电器的驱动器来控制220 V交流步进电机的上升和下降。具体如图3所示。
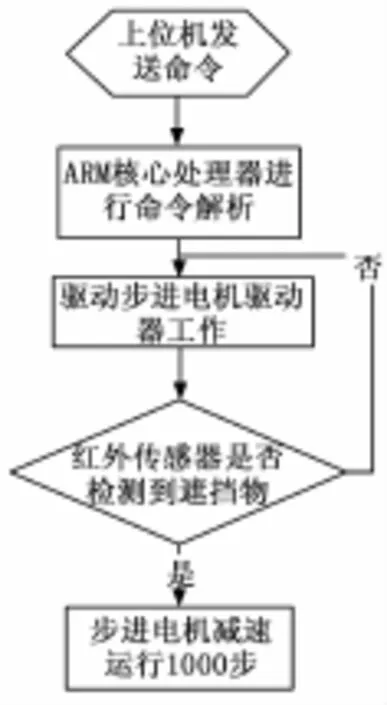
图3 设备初始化控制流程
在直流步进电机检测到有遮挡物后,步进电机减速运行1 000步,经过测试在遇到遮挡物后步进电机减速运行1 000步正好使得传输装置的高度与运输车在一个适当的位置。有利于大包装装到运输车上,此时,220 V伺服电机开始运行,由于要爬坡,采用PVC传送带加大包装箱和传送带之间的摩擦。电机分别选用步进电机和伺服电机是因为步进电机在控制上更加精确,爬坡采用伺服电机,使其具有更大的驱动能力。
1.2剔除装置
在核查订单时,为了将大包装和小包装信息与数据库中信息不符的剔除出去,进行二次包装匹配,在设备的核查后,如有与订单不符的大包装,利用剔除装置将其剔除出去。系统设计中,剔除只是简单的推拉操作,采用气缸的方式进行驱动。气缸充气后在核查订单后发现有需要剔除的订单,检测到大包装到达剔除装置时,进行剔除的推拉操作完成对不符合的订单进行剔除操作。剔除是采用上位机软件检测到不符合的订单发送协议命令给下位机ARM系统,利用控制ARM中的IO口的通断来控制气缸的通断。
1.3显示控制装置
显示控制装置即诺威世纪10.4寸工业平板电脑,具有触摸功能,方便在整个设备启动时,对整个设备进行校准调试。将设备移动到靠近运输车附近,在整个设备启动电源后,手动触发在工控机上点击上升按钮进行传送带上升位置的选择。在设备调试好之后就可以进行嵌入式系统的农产品智能出库操作,带有二维码的大包装经过二维码扫描头后将信息与工业控制器内数据库信息进行匹配,订单核查正常则进行爬坡运送操作,核查出差则进行剔除操作。在整个货物订单核查运送完毕后,人工点击工业控制器上的下降按钮,使整个设备处于同一水平。
2 控制流程设计
本系统设备在设计中采用上位机和下位机的通讯通过协议来完成。他们之间采用自定义的方式进行信息的发送和反馈。协议的基本格式为:帧命令+帧内容+校验。工作方式为上位机发送包含命令字及其必需的操作数的命令帧给下位机,下位机即嵌入式ARM处理器系统,下位机执行后将命令字及其当前状态值返回给上位机[4]。帧命令包括:电机的选取、对电机进行读或写操作、波特率的选择、复位、校验等操作。命令帧后紧随操作数 (帧内容),最后是验证信息。从上位机到下位机的命令帧与从下位机返回给上位机的应答帧拥有相同的格式,区别仅在于帧内容。下面进一步说明一下该协议的命令帧和应答帧的具体内容:
电机的选取:本操作实现选取选定电机的操作。需要给出电机号(地址),返回内容即为电机连接(1),未连接(0)两种情况。根据节点的数量选取相应的位数来定义,利用2^n<=m,其中M为电机的数量,n为要选取的相应的位数。本实验场所设置了2个节点,所以用1位就可以表示;本实验中只是实现了对电机的控制开和关。没有进一步的实现精确地多少步或者多长时间的将大包装传送到运输车中,如若实现精确的包装运输可以在自定义的协议中增加传送带的传送长度[5]。
电机的控制:本操作实现对电机的开和关的控制,根据上位机发来的信息中“0”和“1”进行电机的开和关的控制,当ARM处理器收到上位机发来的控制协议信息时,执行嵌入式内核中的程序打开或者关闭电机,其中控制电机部分的接口采用的是继电器的方式,通过ARM中的程序控制继电器的通断来控制电机的开关。本系统采用了2种类型的电机操作,一个是220 V交流的步进电机,一个是220 V伺服电机。整个设备的控制流程如图4所示。
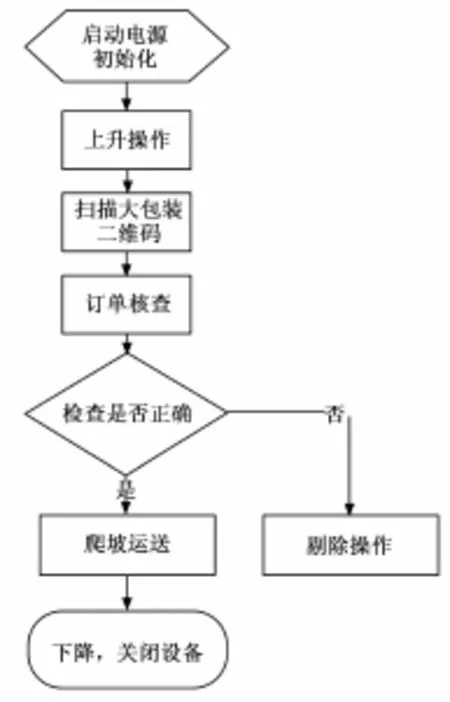
图4 设备控制流程
3 功能设计
设备和系统主要实现的功能包括完成订单查询,上位机软件系统实现订单查询。在订单查询中满足大包装与小包装之间的信息匹配的核查[6],在进行包装时需要将每个小包装对应的信息录入系统中,将每个小包装信息录入的方法很多,有手动录入,自动录入等方式,系统设计的出发点是希望提高物流包装运输过程效率,采用自动录入的方式进行录入,目前自动录入的方式主要包括一维码扫描输入的方式和二维码扫描输入的方式,一维码包含的信息量较少,输入速度快,二维码的信息量大,速度慢[7]。综合两种码制的优点,系统采用小包装用一维码方式,大包装利用二维码方式。对于系统来说需要有二维码和一维码扫描设备,设备能与工控机配合使用。系统采用的是将二维码扫描头与工控机利用USB接口的方式进行数据的通信[8]。获取整个大包装的信息,大包装对应的小包装信息同时会进行数据库的匹配,匹配成功后,大包装会随传动带运输到货运车上,对于传送带的控制需要工控机根据匹配的结果对嵌入式系统进行控制操作。功能主要实现对电机的控制以及气缸的操作,订单查询匹配后,电机会将大包装匀速通过传送带送往运输车,根据运输车的高度,气缸会启动自动升降程序,程序目前还是采用的通过工控机上的按钮实现升降高度与运输车的相适应。如果订单与数据库信息不匹配将进行剔除操作,剔除会利用气缸的推拉操作将大包装从传送带上剔除出来,人工进行信息的核查。每个大包装重量较大,剔除过程中为了保证剔除的包装能够安全方便的被剔除出来,需要将正常的传输停下来,这个过程是相当短暂,不会影响后续包装的正常传送。
4 设备测试
每个小包装上的标签录入信息采用一维码的方式录入系统数据库中,标签中同时还包含有二维码,体现更多的小包装的信息含量。
信息包含,时间,重量,生产厂家等。
大包装的信息格式为生产单位,产品名称等基本信息,和二维码中所包含的详细信息。
5 小结
通过对大小包装的订单核查,不合格订单剔除,大包装精准的运送到装载车上。应用生产一维码的条码打印称重装置,实现小包装中多个一维码与大包装之间二维码的关联,并通过工控机控制嵌入式控制设备实现移动装卸货的上升,下降,爬坡等,红外传感器技术初始化自动将运动调节移动装卸货与装载车之间的距离。能够保证大小包装之间的信息匹配,工控机存储每一批次的信息,且自动生产整个发货信息的清单,方便货物的信息的核查。
通过实现发现该设备需要在下一步过程中需要改进的地方。一是大包装在传送到运送车时,装卸人员在取大包装时,由于大包装以一定的速度冲向卸货人员容易造成人员的伤害。因此在下一步的改进中,需要在程序中增加每个大包装传送距离的精确控制,即货物以一匀速快速的速度运行到车厢时,然后减速。本实验中只是实现了利用步进电机和红外传感器进行整个设备初始化,可以准确的将设备自动移到运输车辆比较合适的位置。
[1]隋育伟.农产品批发市场电子交易与实现[D]:上海:同济大学,2007.
[2]熊会兵,肖文韬.“农超对接”实施条件与模式分析[J].农业经济问题,2011(2):69-72.
[3]杨旭,马光胜,杜中平.基于FPGA的嵌入式自动计量系统研究与设计 [J].计算机工程与设计,2008,29(4):869-872.
[4]刘兴辉,毕国玲,步进电机的单片机控制系统研制[J].辽宁大学学报自然科学版,2007(4):319-321.
[5]邓酩,杨铁军.基于水平集和Image Magick的发货确认管理系统设计[J].计算机工程与设计,2012:2255-2259.
[6]薛辰阳,谭秋林,马游春,等.红外传感器的信号提取和数据采集的设计[J].仪表技术与传感器,2007,2:45-49.
[7]文韬,洪添胜,李震,等,橘园无线传感器网络不同节点部署方式下的射频信号传播试验[J].农业工程学报,2010,26(6):211-215.
[8]梁超,项铁铭,刘超,等.第三代移动通讯信道模型仿真分析[J].计算机仿真,2009,26(9):100-104.
Design of Intelligent Agricultural Product Warehouse Equipment Based on Embedded System
Du Xiaowei1,Fan Beilei2,Qian Jianpin1,Chen Bo1,Feng Hao3
(1.Beijing Research Center for Information Technology in Agriculture,Beijing100097,China;2.Institute of Agricultural Resources and Regional Planning,Chinese Academy of Agricultural Sciences,Beijing100081,China;3.College of Elctronics and Automation,TianJin University of Science&Technology,Tianjin200064,China)
Warehouse-out of agricultural products is an important link between the warehouse storage and logistics.The current operation of agricultural products warehouse-out is rough,the information can not be tracked,and the intelligent level is not high.Based on the advantages of ARM and Windows system,we scan the small and medium packages'codes,check the information between small and large packages,and eliminate those products which packages information does not matched,transfer those information matched products to the truck by lifting belt.Designed a agricultural products warehouse-out device,containing transmission device,warehouse-out products code scanning device,eliminating device,displaying and controlling device,proposed a core part of the control process,and realized the host computer software functions of order verification,product rejection,transmission control.The test shows that the equipment can realize the seamless connection between the mobile loading and unloading goods and trucks,also can check the wrong orders well,and improve the intelligence of the warehouse-out process.
agricultural products out of the library;reading a two-dimensional code scanning;fast order verification;infrared sensors sensing;embedded system
1671-4598(2016)05-0150-03
10.16526/j.cnki.11-4762/tp.2016.05.043
TP3
A
2015-09-22;
2015-12-11。
国家科技支撑计划项目(2013BAD19B04)。
杜晓伟(1983-),男,山西运城人,硕士研究生,主要从事农业信息化方向的研究。
范蓓蕾(1981-),女,浙江人,博士研究生,主要从事农业信息化方向的研究。
钱建平(1979-),男,浙江湖州人,副研究员,主要从事农业信息化和冷链物流方向的研究。
