小型热真空试验自动流程控制技术研究
2016-11-23刘高同
刘高同,孙 宇
(北京卫星环境工程研究所,北京 100094)
小型热真空试验自动流程控制技术研究
刘高同,孙宇
(北京卫星环境工程研究所,北京100094)
由于当前航天器部件级产品的空间环境试验需求日趋增多,对试验流程控制系统的自动化程度及其对不同试验需求的适应性要求更加严;为提高其自动化水平和灵活适应性,以小型热真空试验系统为需求背景,对其试验流程自动控制需求及适应性条件进行了分析,提出并设计了可适应不同需求及条件下的自动控制方法;该方法易于实现,通过试验系统内各类传感器参数作为基准判据对系统的设备和仪器进行流程控制和可靠性保护,采用相对智能的控制策略实现试验系统对不同试验需求的灵活适应;经过测试验证,该控制方法适应于小型热真空试验流程,具备较强的适应性,自动化程度高,能够大幅度提高小型热真空试验流程自动化水平,满足密集型航天器部件级产品空间环境试验需求。
热真空;试验流程;自动控制
0 引言
航天器热真空环境试验设备用于模拟空间真空、冷黑背景,及其空间温度变化的环境条件,为航天器环境试验提供地面条件,充分暴露航天器及分系统、单机等研制过程中的设计、生产和材料缺陷等各种问题,对保证航天器的产品质量及其可靠性起到至关重要的作用[1]。
本文主要对小型热真空环境模拟设备试验需求和过程的自动控制要求进行充分的分析,并提供自动控制技术方案,第一,对真空获得机构启动的初始真空度条件进行阶梯分类,根据不同的初始条件可选择性地控制设备启动和停止,既能保证设备的良好状态,又解决了真空获得机构只能在容器初始状态为大气条件下自动运行的问题,提高了系统的灵活性和可靠性;第二,针对小型真空热环境模拟设备试件控温自动化程度不高以及狭小空间内温度均匀性不高的问题,设计了针对两路不同试件同时进行试验控温循环的自动控制方案,提高了系统对两路不同试件试验需求下试件控温的高效性和适应性。
1 自动控制需求及方案
1.1控制需求分析
小型热真空环境模拟设备试验过程的自动控制主要有两个部分,一是真空、冷黑环境建立过程,二是航天器部组件(以下简称“试件”)控温循环过程。
真空、冷黑环境的建立依靠真空获得机构和低温制冷及热沉系统,如图1所示为真空、冷黑背景建立所需的设备原理图,真空系统控制对象为管路阀门、各级真空泵,反馈对象为真空规获取的真空度数据,根据不同阶段的真空度反馈值对相应阀门和真空泵执行控制,极限条件下可以达到10-5Pa数量级,实现试验所需真空条件的建立;热沉表面涂黑漆,为航天器部组件试验提供冷黑背景,热沉内部通过载冷剂进行热交换带走热量达到制冷的目的,一般热沉制冷分为液氮制冷和机械制冷两种方式[2],本文所叙述的热沉制冷方式为混和工质机械制冷,将低温工质通入热沉,最低可达到-140℃,实现冷背景的建立。
试件控温是航天器热真空部组件试验的重要环节,目前的控温方式重要分为两种[2],一种是调温型热沉直接进行辐射换热的试件控温,目前应用也较为普遍;另一种是低温冷背景下的红外加热控温,执行器一般为红外加热笼、红外灯阵、薄膜加热片等,本文所涉及的试件控温为满足两路不同试件控温,既要满足大范围的控温区间,又要满足温度均匀性,同时兼顾不同试件同时试验,但由于在小型真空热环境模拟设备相对狭小的试验空间内,两路控温存在相互耦合的现象,因此,控制策略根据情况不同分别分析。
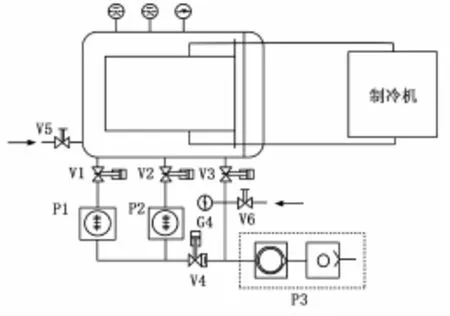
图1 真空低温设备原理图
1.2方案设计
真空、冷黑背景建立过程的自动控制主要是针对真空过程,当真空条件达到之后,再按顺序启动制冷机为热沉制冷,即可实现真空、冷黑背景。目前真空热环境模拟系统具备了相应的自动控制过程,即真空流程启动之后,真空获得机构的阀门、真空泵按照程序设定依据真空度的变化逐步完成启、停控制,直到所需真空条件达到进入维持状态。但是,目前的真空获得机构自动控制都是在容器为大气条件的前提下进行的,限制条件过于苛刻,不够灵活,真空容器密封保压情况下不能执行自动控制,鉴于此种情况,需要对真空过程重新分析。一般情况下,真空获得机构所能实现的真空度范围为1×10-6Pa量级到1×105Pa,考虑到设备对容器与管道压差的要求,根据不同初始条件,自动控制系统选择性执行相应阀门和真空泵的启动顺序,完成对真空流程的自动控制操作。
小型真空热环境模拟设备所采用的控温模式,是在冷背景条件下对试件所在的局部空间进行红外加热控温,红外加热器采用了红外灯阵与红外加热笼两种可选择更换的模式:红外灯阵辐射比较集中,可用于高温度区间的试验工况,但是温度均匀性差;红外加热笼辐射面积能够覆盖到除试件背风面之外的所有角度,可适用于较低范围温度区间的试验工况,且温度均匀性比较高。采用两者可选择的模式,可以兼顾不同温区试验条件的控温要求。
如图2所示,红外加热装置为两路互相独立的弧形排列红外灯阵,其辐射区直接正对相应的对象试验件,两路红外灯阵之间存在辐射干扰。红外灯阵热流控制均采用PID算法[3]控制程控电源调节电流大小来进行红外加热控温,两路控温相对独立,因此可分别编程实现。方式较为简单,单路红外灯阵采用自整定PID控制,另外一路当做辐射扰动存在[4],两路控制策略一致,并互为干扰。原理图如图3所示。
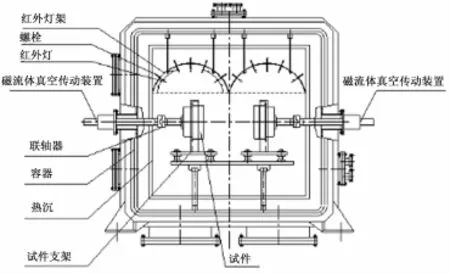
图2 红外灯阵
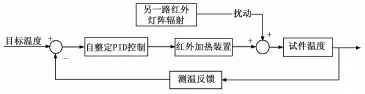
图3 单路红外灯阵控温原理
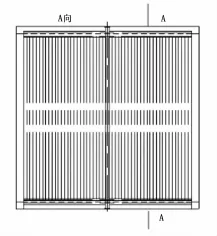
图4 红外加热笼
如图4所示,当红外加热装置为两分区红外加热笼时,两片分区的控制通过控制程控电源调节电流大小进行红外加热控温,仍以两件试验件为试验对象,与上一个红外灯阵方案的不同之处在于,两个红外笼加热分区并不是直接正对单一试件,还会直接辐射到另外一个试件,这就导致两者辐射交叉现象较为严重,因此不可能进行两路完全独立的红外加热控温。在此种红外加热模式下,选择以其中一路为主控温,另一路跟随控温,达到两路同时兼顾满足试验指标的目的。原理图如图5所示。
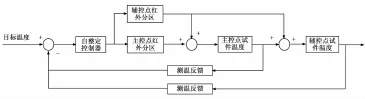
图5 两分区红外加热笼控温原理
设计中采用这两种模式可选择,是为了满足系统对热真空试验不同任务需求的最大化利用方案,程序实现时可以通过选择实现两种不同模式。
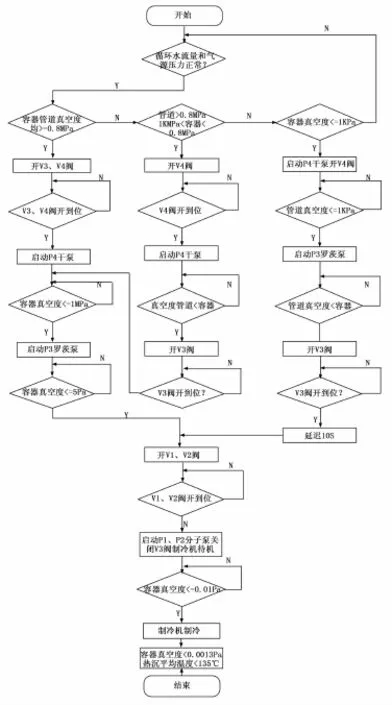
图6 设备自动控制流程图
2 实现过程
2.1控制结构
测控系统硬件是实现其自动控制技术的基础,在结构上为两级分布式控制结构[5]。底层硬件由PLC(Programmable Logic Controller)实现,控制系统其他外设主要包括温度传感器(控温反馈及温度监测点测量)、压力/流量传感器、直流程控电源(包括红外加热装置)、制冷机控制器、分子泵控制器、干泵变频器及其他阀门、按钮指示等设备。
温度传感器采用PT100铂电阻,测量精度可达到0.1℃,由PLC的模拟量输入模块进行数据采集,作为温度监测数据分析以及试件控温反馈的依据。直流程控电源的控制信号采用模拟信号控制,由PLC的模拟量输出模块输出4~20 m A信号控制直流电源输出功率大小,控制算法程序由PLC编程实现。红外加热装置可根据需要选择为红外灯阵或者红外加热笼,直流程控电源容量能同时满足两种选择需求。
2.2软件实现
测控系统软件分为两部分实现,首先是由PLC控制器编程实现的真空及冷背景建立自动控制程序、试件控温自动程序,其次是由远程测控计算机组态软件平台实现的上位监控软件,任务是进行设备状态、温控数据的实时显示,以及数据存储、趋势曲线实时及历史分析等。
2.2.1软件策略
真空及冷背景建立过程的自动控制程序如图6所示。
试件控温自动控制流程如图7、图8所示为两种加热模式下控温程序流程,红外灯阵可由PLC单独运行两段程序同时实现,红外笼时则区分主、辅点控温,由一个程序实现,两者区别在于温度保持点控温策略不同,流程图如图7所示。
2.2.2人机交互界面
系统运行过程中,参数设定、数据监视、文档处理等需要人机交互接口,因此远程上位组态软件设计的核心是与PLC的数据交互过程以及数据库的存储处理过程,上位组态软件只作为人机交互接口,不直接控制现场设备,由PLC完全控制,提高了系统可靠性。真空、冷背景过程监控界面和试件控温过程界面中。温度循环控制的参数设置包括循环次数、点目标温度、点保持时间等,自动控制运行过程中,所有设定参数上载到PLC中。另外,试件控温模式选择也在软件界面上进行。
3 试验结果及分析
测试过程中,试验系统各设备可依据传感器参数选择执行不同的子程序,完全实现试验流程自动化,可做到一键式控制,另外,试验系统可在任意情况下中断、返回执行,对温度控制对象的选择性也灵活多样,提高了试验系统的适应性。
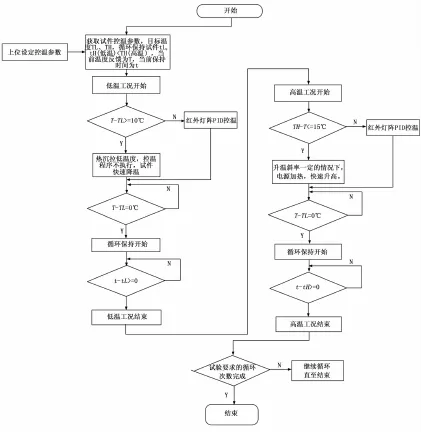
图7 单路红外灯阵自动控温流程图
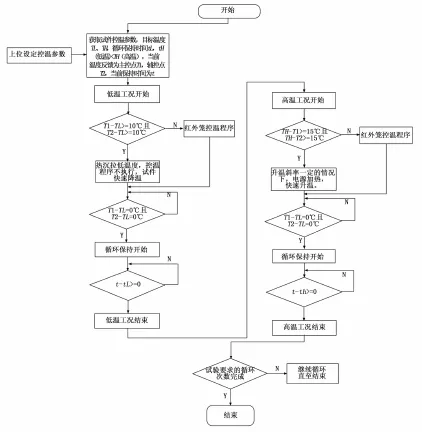
图8 两分区红外加热笼自动控温流程图
在系统进行有载调试中,真空度低温时维持在10-4Pa至10-5Pa量级;由于容器中安装两个试件及数量较多的新电缆,放气量较大,高温70℃时真空度为10-3Pa量级,基本满足试验要求,数据如图9所示。在调试中分别进行了红外灯阵及红外加热笼的试验调试,图10为两分区红外加热笼时试件的温度数据,稳定度较好,温度均匀度相对好;两路独立红外灯阵控制时适应性基本一致。
4 结论
本文主要进行了小型热真空试验系统的试验流程自动控制技术进行研究,重新分析了完整的热真空试验系统自动控制需求,对其试验流程控制方案进行了设计,提出了基于传感器参
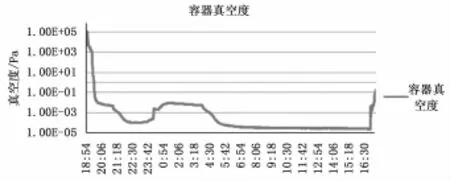
图9 真空度曲线
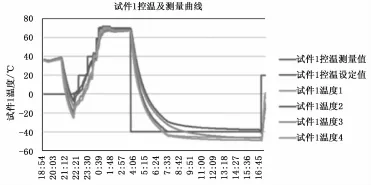
图10 控温测量曲线
数作为判据的,可适应多种不同初始条件及不同试验工况下的控制方法,设计控制系统并通过软件实现此控制方法,进行多次调试,试验系统流程自动化程度提高,灵活适应性显著增强。
[1]黄本诚,马有礼.航天空间环境试验技术[M].北京:国防工业出版社,2002.
[2]张磊,丁文静,刘高同,等.热真空试验设备热沉调温系统的技术研究[J].真空与低温,2011-(S1).
[3]顾苗,刘劲松.真空热试验中闭环温度控制参数分析[J].航天器环境工程,2010,27 (5):611-615.
[4]何鸿辉,贺显红,等.一种调温热沉的自动控制技术[J].航天器环境工程,2004,27 (2):206-209.
[5]顾苗,刘劲松.小型热真空试验设备网络化集群测控技术[J].航天器环境工程,2008,25 (4):338-341.
Research on Small Thermal Vacuum Test Automatic Process Control Technology
Liu Gaotong,Sun Yu
(Beijing Institute of Spacecraft Environment Engineering,Beijing100094,China)
Due to the current demand for space environment test of the spacecraft components products is increasing,the degree of automation of the test process control system requirements and its adaptability to different test requirements are more stringent.In order to improve its level of automation and flexible and adaptable,with small thermal vacuum test system demand background,the test process automation needs and suitability conditions were analyzed,an automatic control method can be adapted to different needs and conditions is proposed and designed.This method is easy to be implemented,process control and reliability protection for equipments and instruments of the system are through various sensor parameters of the test system as a reference criterion,and with a relatively intelligent control strategy to adapt to different experiment requirements of the test system flexibly.After testing to verify that the control method is suitable for small thermal vacuum testing procedures,with strong adaptability,high degree of automation,can significantly improve the small thermal vacuum test process automation level to meet demands of space environment tests for the intensive spacecraft components products.
Thermal vacuum;Testing procedures;Automatic control
1671-4598(2016)05-0113-04
10.16526/j.cnki.11-4762/tp.2016.05.033
TP3
A
2016-03-04;
2016-03-14。
刘高同(1986-),男,北京人,硕士研究生,主要从事航天器空间环境模拟控制技术方向的研究。
