风力发电机偏航控制系统设计仿真技术研究
2016-11-23李艳蓉陈建炳陈爱国
邹 宇,李艳蓉,陈建炳,陈爱国
(1.中国航天科工集团六院601所,呼和浩特 010076;2.台州市公安局特警支队,浙江 台州 318000 3.内蒙古工业大学 电力学院,呼和浩特 010051)
风力发电机偏航控制系统设计仿真技术研究
邹宇1,李艳蓉2,陈建炳2,陈爱国3
(1.中国航天科工集团六院601所,呼和浩特010076;2.台州市公安局特警支队,浙江台州318000 3.内蒙古工业大学电力学院,呼和浩特010051)
偏航控制系统是风力发电机的核心机构之一,其硬件设计、软件开发与控制算法的合理选用将直接影响偏航控制系统研发成本、周期,以及风力发电机的风能利用率和安全可靠性等;仿真技术作为一种有效的性能预测、试验验证和分析的综合性技术,其具有高效、安全、受环境条件的约束较少等优点,在复杂系统的研发过程中已成为不可或缺的重要手段;因此,偏航控制系统研发前期,为确保系统软硬件开发、控制算法设计的合理性,缩短研发周期、提高研制效率、降低资源成本,将仿真作为主要验证手段;利用Proteus对偏航控制系统的硬件电路和系统软件进行仿真验证,利用MATLAB对控制算法设计的合理性进行考核,为实际偏航控制系统研发提供依据和指导。
风力发电机;偏航控制系统;Proteus硬件仿真;Matlab算法仿真
0 引言
风能是一种清洁的可再生能源,风力发电是风能利用的主要形式,发电过程不消耗矿产资源,不排放污染物和温室气体,是发展最快的绿色能源。也是目前可再生能源中除水能之外技术最成熟、最具有规模化开发条件和商业化发展前景的发电方式之一。由于风向随时会发生变化,若风力发电机始终对准风向,能够保证风机工作于较高风能力利用率的状态;或当风力强度超出可用范围时,使风力发电机保持侧风状态,确保超过风力发电机的安全可靠;风力发电机出现电缆缠绕或故障检修时,可人工控制其偏航状态,性能稳定、工作可靠的偏航控制系统是实现上述功能的保障[1]。偏航控制系统作为风力发电机特有的伺服系统,是风机的核心机构之一,它是使风轮稳定的跟踪变化的风向,保证捕获最大的风能。因此,为提高风能利用率、保证风力发电机的可靠工作,应对偏航控制系统进行设计研发。
1 偏航控制系统总体方案设计
系统的作用:1、在可用风速范围内自动对风;2、在非可用风速范围下,为防止风机叶片损坏,要停机并进行90°侧风;3、在连续跟踪风向可能造成电缆缠绕的情况下的自动解缆;4、在自动偏航失败或风力机需要维修时,进入人工偏航;5、当机舱处于正确位置时,提供必要的锁紧力矩,使机舱定位,以保证风力发电机组的安全运行[2]。偏航控制系统接口关系如图1所示。

图1 偏航控制系统接口关系
根据偏航控制系统接口关系,以单片机为核心,设计偏航控制系统硬件电路结构如图2所示。

图2 偏航控制系统硬件电路结构
风向传感器、风速传感器、数字编码器分别对风向,风速,机舱方向进行采样,从传感器出来的信号经过处理后,送入单片机。单片机对采集的数据进行数据处理,根据处理结果,送出驱动信号,控制偏航电机的正、反转及刹车机构的动作。为方便偏航控制系统调试,通过人工方式发送各类信号到偏航控制系统,系统根据信号执行相应操作,通过仿真方式验证系统软硬件开发、控制算法设计方案的合理性。
2 软硬件仿真电路设计
基于Proteus设计偏航控制系统仿真电路:①用AT89C52单片机作为处理器;②用LCD显示当前工作状态;③用步进电机模拟偏航执行机构;④用滑动变阻器模拟角度传感器;⑤用按键控制信号的输入。
偏航控制系统仿真电路图如图3所示。通过改变滑动变阻器阻值,模拟风向角度作为偏航系统输入;ADC0804将采集到的角度模拟量转换为数字信号送入单片机;LCD和步进电机通过锁存器74 LS373共用P0口;用ULN2004A(达林顿管)来驱动步进电机。
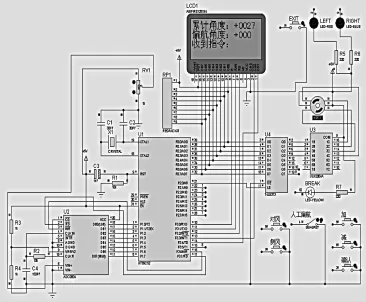
图3 偏航控制系统仿真电路图
LCD显示内容:“累计角度”表示开机以来,电机总共偏转的角度;“偏航角度”表示采集到的风向角度,偏航电机会据此转过相应的角度;“收到指令”表示此时偏航系统执行的操作。
LED作用:用LED(LEFT)、LED(RIGHT)模拟偏航系统左、右纽缆开关,当电机向同一个方向连续偏转超过一定的角度时,会触发纽缆开关,此开关动作将会触发安全链动作,电机立刻回转,并发出故障报告。用LED(BREAK)模拟偏航刹车,偏航开始时,此灯灭,表示放开刹车;偏航结束后,此灯亮,表示刹车机构将偏航轴抱紧。
各按键功能:按下“对风”、“侧风”键,电机执行对风或侧风动作;闭合“人工偏航”开关,进入人工偏航界面,通过“加”、“减”、“确认”键,完成偏航角度的人为设定;控制系统完成无条件解缆,会处于停机等待状态;待故障解除后,按下“EXIT”键来退出停机等待状态[3]。
偏航控制系统程序由C语言编写,在集成开发环境Keil中对程序进行调试;将编译完成的控制程序加载到Proteus仿真电路中,以验证软硬件设计方案的可行性及合理性。
3 Proteus仿真结果
3.1自动对风
按下“对风”键后,根据采集到的风向角度,使步进电机转过对应的角度,完成对风;对风过程中,LCD显示屏“收到指令”项显示“对风”字样,如图4所示。
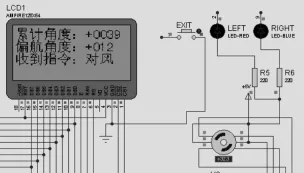
图4 执行对风
3.2侧风
侧风,当风速进入非可用范围时,机舱进行90°或-90°偏转;偏转角度取决于之前的累积偏转角度。例如:当累积偏转角度为-73°时,按下“侧风”键,电机会进行+90°的偏转;侧风完成后累积角度变为+17°,即完成了侧风,同时实现一定程度的解缆;侧风过程中,LCD显示屏“收到指令”项显示“侧风”字样。
3.3条件解缆
条件解缆,当风力发电机的机舱向同一方向连续偏转达到3圈时,若此时风速小于风力机组启动风速且风机无功率输出,则停机,控制系统使机舱反向解缆;若此时有功率输出,则暂不解缆。当累积角度达到1080°时,系统会进行条件解缆;条件解缆是通过软件对偏转角度进行计数,利用程序实现解缆。在解缆过程中,LCD显示屏“收到指令”项显示“条件解缆”字样。
3.4无条件解缆
无条件解缆,当机舱向同一方向连续偏转达到3圈半,而且软件一直没有执行条件解缆时,会触发纽缆开关,此开关动作会触发安全链动作,属于硬件解缆;无条件解缆是一种故障状态,解缆完成后,停机等待,发出故障报告;等故障排除后,再重新开机[4]。当累积角度达到1260度时,会执行无条件解缆;若电缆是反向过度缠绕,则LED(LEFT)会亮,表示反向纽缆开关被触发,电机进行正向解缆;若电缆是正向过度缠绕,则LED(RIGHT)会亮,表示正向纽缆开关被触发,电机进行反向解缆;无条件解缆过程中,LCD显示屏“收到指令”项显示“无条件解缆”字样。解缆完成后,“收到指令”项显示“故障”字样,待故障排除后,按下“EXIT”键后,LED(LEFT)灯或LED(RIGHT)灯灭,退出故障状态,程序复位。
3.5人工偏航
闭合“人工偏航”开关,进入“人工偏航”界面,如图5所示;选中“人工设定”项,通过“加”、“减”、“确认”键来设置角度;选中“偏航启动”项,按下“确认”键,电机按照人为设定好的角度进行偏转;完成人工偏航后,打开“人工偏航”开关,退出人工偏航,回到对风界面。
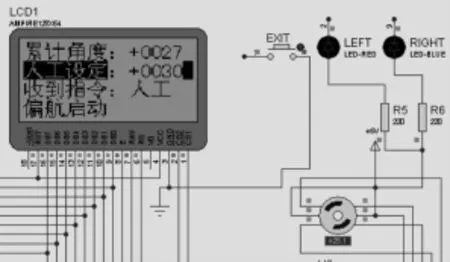
图5 执行人工偏航
偏航控制系统通过COMPIM串口与PC机进行通信,将系统仿真/工作情况以.txt格式文件保存在PC中。
4 控制算法设计及仿真
风力发电机偏航控制算法会直接影响风机的性能及功率输出,而风力发电机偏航控制系统作为一个典型的非线性系统,很难建立精确的数学模型,参考资料[5]提出的简易数学模型,偏航系统的开环传递函数如下:

通过Matlab进行仿真,得到偏航控制系统阶跃响应如图6所示。

图6 偏航控制系统阶跃响应
可见,偏航控制系统振荡严重,并且调节时间过长,对于偏航机械系统来说十分不利,将严重影响偏航控制系统工作的稳定性及工作寿命等指标。因此,应对偏航系统控制算法进行合理设计,期望偏航控制系统能够无超调并以适当的偏转速度使风力发电机进行对风。
模糊控制算法不需要有精确的控制对象数学模型,它在一定程度上模仿了人的控制,是一种智能控制的方法,其所具备的构造容易、鲁棒性好等特点适用于风力发电机偏航控制系统的算法设计和控制功能实现。
选用模糊PID控制作为风力发电机偏航控制系统算法。当输入信号处在大范围内使用模糊控制,处在小范围内使用PID控制。阈值取为e0=0.3,当偏差信号时启动模糊控制,当时,启动PID控制。其中设计PID环节如下:设计模糊控制规则如表1所示。
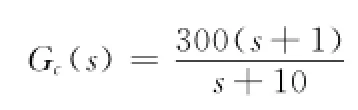

表1模糊控制规则表
根据上述设计的PID环节及模糊控制规则,在Simulink环境下构建风力发电机偏航控制系统的模糊PID控制仿真结构如图7所示。
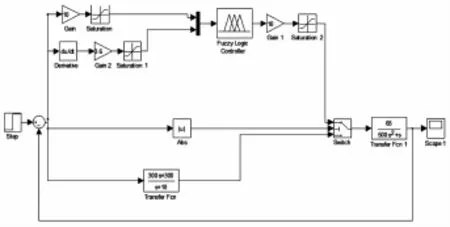
图7 偏航控制算法模糊PID控制仿真结构
将阶跃信号作为输入,考核风力发电机偏航控制系统模糊PID控制算法性能。阶跃响应仿真结果如图8所示。

图8 采用模糊PID控制算法的偏航系统阶跃响应
通过仿真验证可知:采用模糊PID控制算法的偏航系统响应速度快、初始阶段超调量小、风力发电机能够稳定运行。因此,模糊PID控制算法适用于风力发电机偏航系统控制。
5 结论
利用仿真技术对风力发电机偏航控制系统软硬件设计方案的可行性和合理性进行了验证:在Proteus平台上搭建了偏航控制系统硬件仿真电路,较好地验证了硬件设计合理性;通过MATLAB/Simulink对偏航系统控制算法设计进行了验证,由仿真结果可知,采用模糊PID控制算法获得了较好的控制效果。上述仿真验证方法能够为真实风力发电机偏航控制系统硬件开发、方案验证及控制算法设计优化等工作提供有效的指导和支撑。
[1]刘庆玉,李轶,谷士艳.风能工程[M].沈阳:辽宁民族出版社,2008.
[2]苏绍禹.风力发电机设计与运行维护[M].北京:中国电力出版社,2002.
[3]李晓燕,王志新.风力机偏航系统控制策略及系统设计[J].控制系统,2007,23 (9-1):1-3.
[4]熊礼俭.风力发电新技术与发电工程设计、运行、维护及标准规范使用手册[M].北京:中国科技文化出版社,2005.
[5]李毅,温正忠,赵少刚,等.风力发电机偏航系统模糊控制的研究[J].现代机械,2006 (1):29-31.
[6]韦巍,何衍.智能控制基础[M].北京:清华大学出版社,2008.
[7]周景润.Proteus在MCS-51&ARM7系统中的应用百例[M].北京:电子工业出版社,2006.
[8]陈朝元,鲁五一.Proteus软件在自动控制系统仿真中的应用[J].系统仿真学报,2008,20(2):318-320.
Study on Wind Turbine Yaw Control System Design and Simulation Technology
Zou Yu1,Li Yanrong2,Chen Jianbing2,Chen Aiguo3
(1.CASIC 601stInstitute,Huhehaote010076,China;2.Special Brigade,Taizhou city police Station,Taizhou318000,China;3.College of Electricity,Inner Mongolia University,Huhehaote010051,China)
Yaw control system is one of the core institutions of wind turbine,its hardware design,software development and rational use of the control algorithm will directly affect the yaw control system exploit costs and time,And the utilization of wind energy and the safety and reliability of wind turbines,etc.Simulation technology as integrated technologies that can effectively predict performanceion,test verification and analyze,it has advantage that include efficiency,safety,and less environmental influence,it has became the indispensable tool in the development of complex systems.Thus,in the yaw control system early development,to ensure that the system hardware and software development,design of control algorithm is reasonable,and shorten the development time,improve the development efficiency and reduce resource costs,the simulation is the primary means of verification.The scheme of yaw control system hardware and software was emulated by Proteus,and the design of control algorithm was simulated by MATLAB.Providing the evidence and guidance for the actual yaw control system development.
wind power generation;yaw control system;Proteus emulation;Matlab simulation
1671-4598(2016)05-0099-04
10.16526/j.cnki.11-4762/tp.2016.05.029
V435
A
2015-11-05;
2015-12-07。
邹宇(1984-),男,内蒙古包头人,工学硕士,主要从事固体火箭发动机试验与测试技术方向的研究。
陈爱国(1955-),男,内蒙古呼和浩特人,教授,主要从事检测技术与自动化装置方向的研究。
