一种多目标FMCW雷达的高效距离速度测量方法
2016-11-22邢自然朱冬晨
邢自然,朱冬晨,金 星
(1.上海科技大学信息科学与技术学院,上海 200120; 2.中科院上海微系统与信息技术研究所,上海 200050)
一种多目标FMCW雷达的高效距离速度测量方法
邢自然1,朱冬晨2,金 星2
(1.上海科技大学信息科学与技术学院,上海 200120; 2.中科院上海微系统与信息技术研究所,上海 200050)
为实现FMCW(Frequency Modulated Continuous Wave)雷达在复杂多目标场合的无模糊测量,本文提出了一种梯形波调制方式,并首次推导了其在最坏情况下的虚假匹配结果数.在此基础上,本文创新地设计了快速中频容差匹配算法(TFBM,Tolerance-Fast Beat frequency Matching)和虚假目标消除算法(FGTC,Fast Ghost Targets Canceling)及其对应的容差匹配条件.其中TFBM算法可以根据一个梯形周期的测量结果,容差、快速地找出所有可能的匹配;FGTC算法可以消除TFBM算法结果中的虚假目标.严格地理论推导和仿真结果表明,在梯形波调制下的FMCW雷达配合使用TFBM和FGTC算法不仅可以无模糊测量多目标的速度、距离信息,而且可以显著地降低计算复杂度.
FMCW;梯形波调制;多目标测量;距离速度去耦合;快速配对算法
1 引言
FMCW雷达由于其优秀的性能和低廉的成本得到了广泛的应用.单一目标场景下,使用上、下扫频段中频回波信号匹配可以解决FMCW雷达速度距离耦合问题[1].但多目标场景下,传统三角波或锯齿波调制的FMCW雷达由于上下扫频频率可能测量到多个,无法进行正确的匹配,难以准确测量目标信息.
文献[1]提出了一种MTD-频域配对法.该方法通过MTD(动目标检测)简化目标环境,之后基于上下扫频段频谱的类似程度实现匹配.但在实用中存在匹配条件难以确定、计算量大的缺点.
文献[2,3]研究了基于2维FFT的多目标速度距离测量算法.该方法通过发送快速调频脉冲串,利用2维FFT算法直接得到每个目标的信息,从根本上避免了匹配的困难.但是,为扩大无模糊测速范围、增加速度分辨率,雷达需要减少每个调制周期的时长并积累多个调制周期的中频信号,这样不但会影响系统的响应时间而且需要强大的计算资源.
文献[4]研究了基于变周期三角波调制的多目标测量方法.该方法首先通过改变三角波的调制周期,分别测量不同调制周期下所有可能目标的距离、速度;然后整合不同周期下的目标测量信息,利用真实目标的距离、速度不随调制周期改变的特点来消除其中的虚假目标.该方法在很大程度上解决了多目标雷达的测量问题,但没有明确指出消除虚假目标的高效算法.设目标数为T,则在上下扫频段产生的待处理目标信息数均为T2,.若采用逐个比较的方法来处理这两组数据,其时间开销为O(T4).当目标数T大时,将严重影响雷达系统的实时性.

文献[5]研究了一种变周期锯齿波的测量方法并提出了目标匹配算法,但是采用最小耦合距离差的匹配方法可能导致多普勒频移大的目标丢失和虚假目标的产生,同时文献中的匹配方法需要从误差矩阵找出最小值,复杂度较高.
文献[6]研究了一种梯形调制波体制,该体制的FMCW雷达可通过上下扫频阶段和恒频阶段的中频信号的匹配确定目标并得到其运动参数,并且可以在很大程度上减少仅通过上下扫频匹配所产生的虚假目标.但是,该文没有在理论上分析梯形波调制的性能提升程度,并且文中的匹配条件较为理想,匹配算法计算复杂度较高,在实用中影响系统的鲁棒性和实时性.
文献[7,8]研究了变周期梯形波调制的方法,类似于文献[4],该体制的FMCW雷达可以通过改变梯形波的调制周期,综合不同调制周期的目标检测结果来消除文献[6]中匹配方法产生的虚假目标.但依然存在匹配条件理想且计算复杂度高的问题.
本文首先提出一种变周期梯形波的调制方式,并在此基础上设计了相应的信号处理算法TFBM和FGTC,如图1.理论分析表明,梯形波调制相对于传统三角波调制具有减少虚假目标的能力,填补了文献[6]中没有理论分析的空白;TFBM算法可以容差、快速地匹配一个调制周期的信号,提升了文献[6]中频匹配算法的速度和鲁棒性;FGTC则可以快速整合不同调制周期的测量结果,实现虚假目标消除,提升了文献[4,5,7,8]的虚假目标消除算法的速度和鲁棒性.同时,本文给出了这两种算法的容差匹配条件,并在理论上证明了算法及匹配条件的正确性.最后,通过详细的仿真给出了本文方法在不同场景下的性能表现.
2 变周期调制FMCW雷达原理
为了方便表示,本文采用如下符号定义:




fbase:雷达发射载波频率.
B:扫频阶段带宽.
Tre,m:第m个调制周期的扫频段总时长.
Tc,m:第m个调制周期的恒频段时长.
fr:目标距离导致的差频.
ΔR:雷达系统距离分辨率.
ΔV:雷达系统速度分辨率.
ΔfIF:扫频阶段频谱分辨率.
Δfd:恒频连续波阶段频谱分辨率.
δmatch:TFBM算法匹配区间长度.


ΔR:FGTC算法距离维匹配区间长度.
Δv:FGTC算法速度维匹配区间长度.
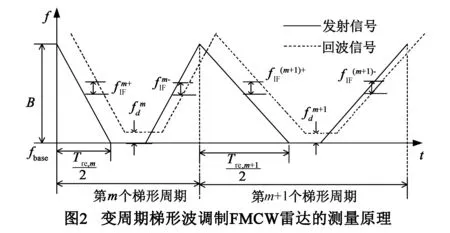
2.1 变周期梯形波调制的FMCW测量原理
图2展示了变周期梯形波调制FMCW雷达的测量原理.雷达的发射波在目标处反射,其延迟为τd,并且由于雷达目标间的相对运动产生了多普勒频移fd.根据文献[6]的结果,可以得知:
(1)
其中有
(2)
若v为正表示目标远离雷达,v为负表示目标接近雷达.因此,对于同一个目标在一个梯形调制周期内存在:
(3)
由于梯形波调制方式增加了多普勒频率的测量信息,目标信号匹配的条件被强化为式(3).而三角波体系则不存在类似的匹配条件,因此梯形波调制方式可以减少虚假目标的产生.
图3分别展示了基于三角波和梯形波调制的多目标测量性能.其中横坐标fd表示速度维多普勒频率轴,fr表示距离维频率轴.图3(a)表示在最好情况下梯形波体系(右)不会产生虚假目标,而三角波体系(左)会产生虚假目标.图3(b)则表示在一般情况下梯形波体系(右)也可能产生虚假匹配,但是相对于三角波体系(左)还是具有虚假目标产生较少的优点.
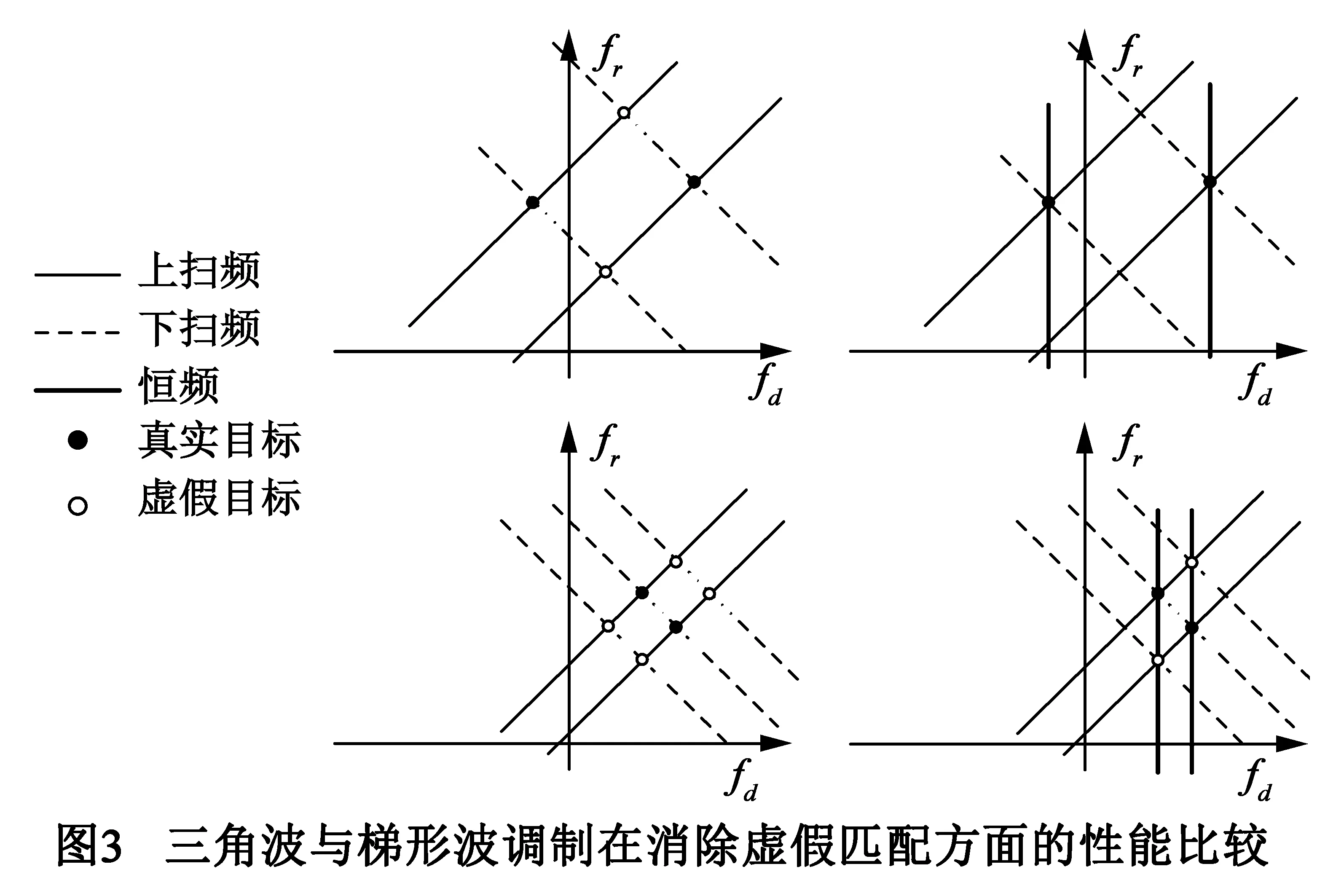
由于目标的位置的不确定性,为定量分析梯形波调制方式带来性能提升,本文采用最坏情况分析法.所谓最坏情况指的是产生虚假目标最多的情况,即恒频段多普勒信号可以覆盖整个匹配区域,如图4.为保证对静止目标的测量,需补充多普勒频率为0的情况.
设在雷达监测区域内有T个目标,则上、下扫频段最多各检测到T个目标信号.因此,在三角波体系下最多会产生T2个匹配结果.
对于梯形波体系,当目标数为T时,产生的匹配网格边长最大为⎣T/2」+1个节点.因此产生的最大匹配结果为:
(⎣T/2」+1)2
(4)
从表1中可以明显看出梯形波调制的优势.当实际中目标数较大时梯形波体系在最坏情况下产生的匹配结果数约为三角波体制的25%,可以减少后续处理的复杂度并且节省内存空间.

表1 三角波与梯形波的性能对比

目标个数最坏情况下的所有可能目标数最大虚假目标个数三角波TT2T2-T梯形波T(⌊T/2」+1)2(⌊T/2」+1)2-T
3 快速容差中频匹配算法TFBM
3.1 算法设计
图5展示了TFBM算法在FMCW雷达信号处理流程中的应用.本文目标中频信号测量采用FFT算法,而信号检测则使用在多目标环境下鲁棒性较好的OS-CFAR(有序统计量恒虚警率检测)算法[9].

根据FFT算法原理有:
(5)

在使用FFT算法测量时,谱峰一定在最大和次大谱之间出现.因此,如果以最大谱峰所对应的频率作为实际测量的频率,则最大带来ΔfIF/2的系统误差.即:
(6)
(7)
|X(i)-Y(j)-V(k)|≤δmatch
(8)
并有如下前提:
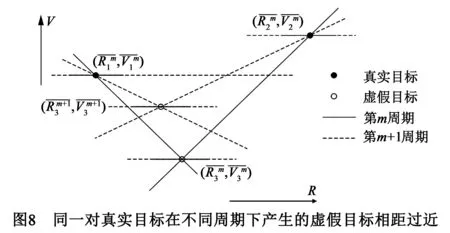
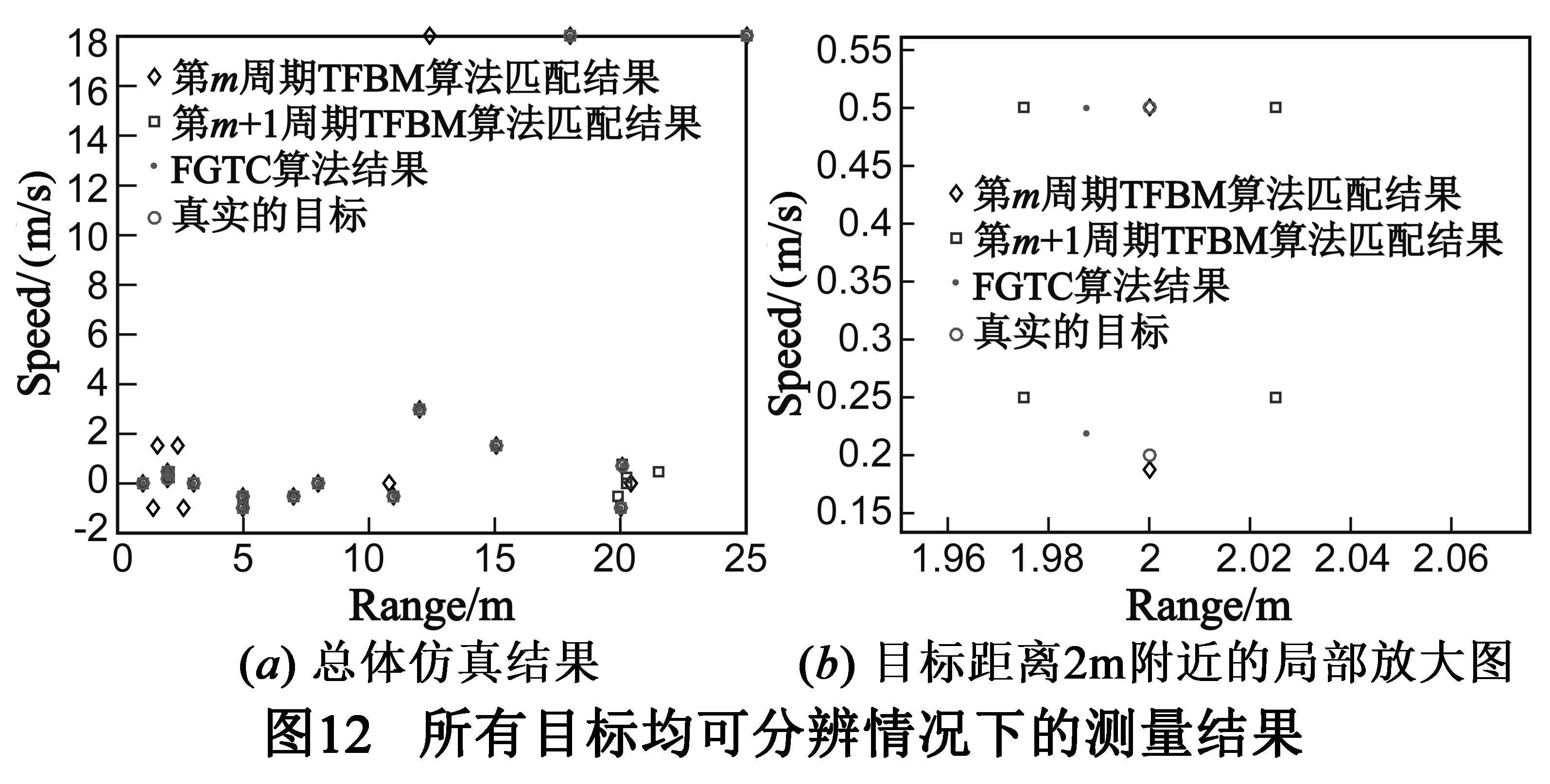
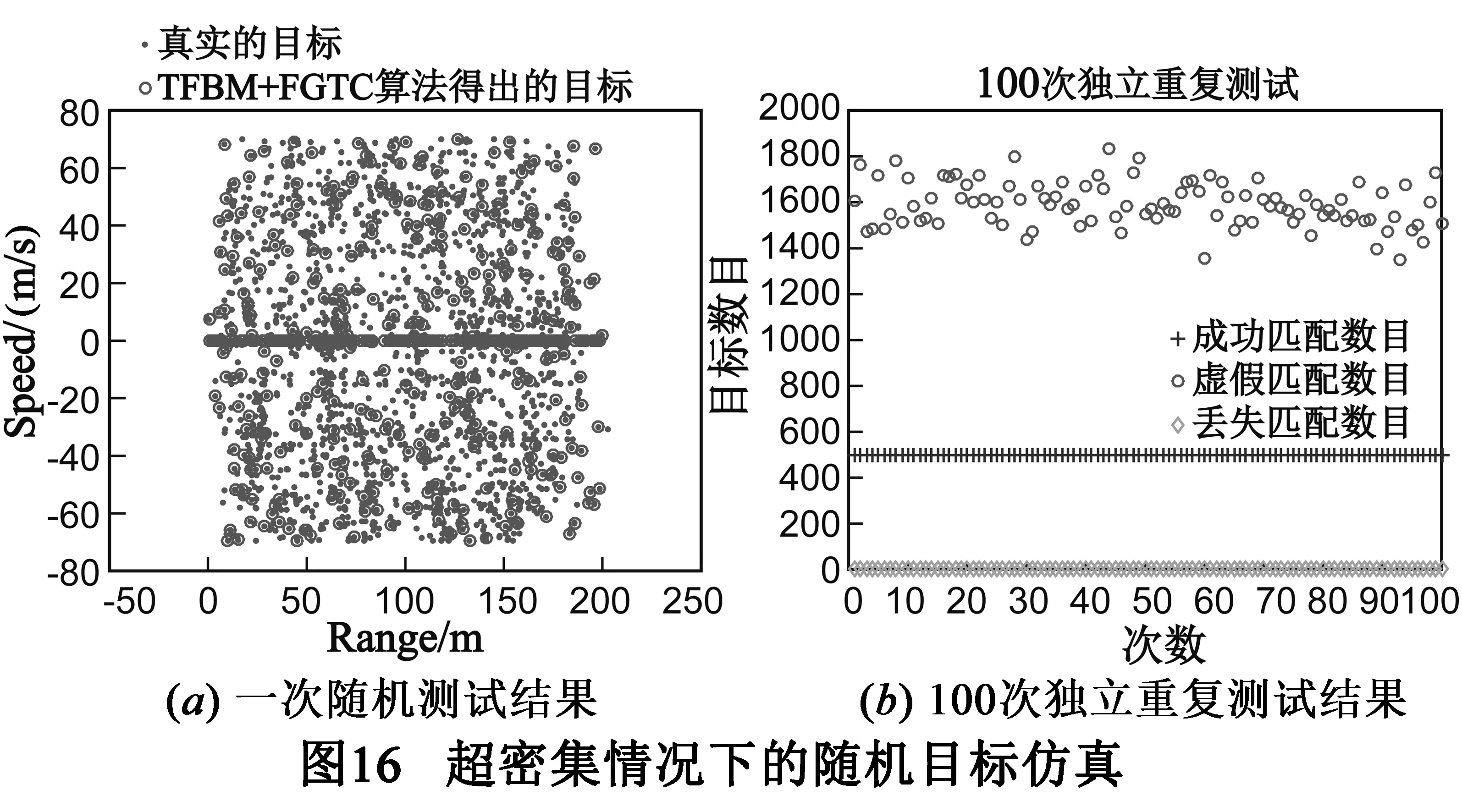
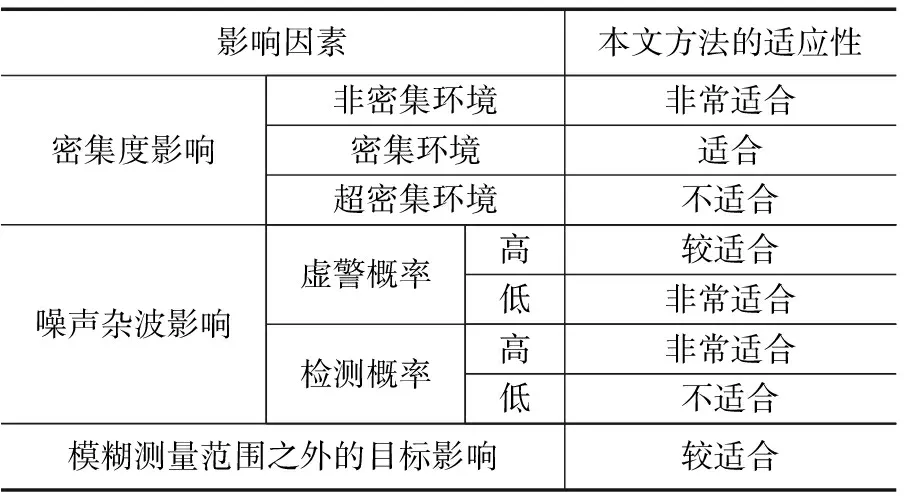
X(i) (9) 基于式(9)设计的TFBM流程如图6所示. 3.2 TFBM算法的正确性证明 为证明算法的正确性,首先证一个简单的定理. 3.2.1 引理的证明 定理1 对于X(i),Y(j),V(k)满足 则对于所有的X(l)(l=1,2,…,N),不存在Y(j) 能与之匹配得到V(k),使得|X(l)-Y(j)-V(k)|≤δmatch成立. 证明 对于任意的l=1,2,…,i-1,有: X(l)-Y(j) 同理对于任意的l=i+2,i+3,…,N,有: X(l)-Y(j)>X(i+1)-Y(j)>V(k)+δmatch 对任意l=1,2,…,N,有|X(l)-Y(j)-V(k)|>δmatch成立,原命题正确.并且,由此很容易得到推论1. 推论1 对于X(i),Y(j),V(k)满足 则对于所有的Y(l)(l=1,2,…,N),不存在X(i)与之匹配得到V(k),使得|X(l)-Y(j)-V(k)|≤δmatch成立. 约束1 若存在Y(j),使|X(i)-Y(j)-V(k)|≤δmatch成立,则不存在任意的Y(l),l=1,2,…,M,l≠j,满足|X(i)-Y(l)-V(k)|≤δmatch.这表明在给定V(k)的前提下,正确的δmatch应该足够的小以区分Y(j)和Y(l).同样,X(i)也有类似的匹配关系. 3.2.2 算法证明 为方便证明,假设X(0)=-∞,Y(0)=-∞.TFBM算法中,当下标i变化时,有如下两种情况: (1)X(i)-Y(j)-V(k)<-δmatch 此情况下,有X(i)-Y(j-1)-V(k)>δmatch.根据推论1可知,此时不存在Y(j)可以令X(i)满足|X(i)-Y(l)-V(k)|≤δmatch.TFBM算法正确. (2)|X(i)-Y(j)-V(k)|≤δmatch 此时可以直接利用约束1,X(i)应被排除.因此,TFBM算法也是正确的. 综上可知,TFBM算法对于下标i的更新是正确的.同理可证TFBM对于下标j的更新是正确的.因此可证TFBM是正确的. 3.3 匹配区间δmatch的求取 3.3.1 匹配区间δmatch的下界 3.3.2 匹配区间δmatch的上界 合理的δmatch应足够小来区别不同的目标. (1)满足约束1的δmatch 当V(k)-δmatch≤X(i)-Y(j)≤V(k)+δmatch时,若欲使TFBM算法运行正确,则需要控制δmatch使得[X(i),Y(j+1),V(k)]和[X(i+1),Y(j),V(k)]无法匹配.以[X(i),Y(j+1)]为例,有 X(i)-Y(j+1)=X(i)-Y(j)-p1×ΔfIF 其中p1为整数,则有: V(k)+δmatch-p1ΔfIF≥X(i)-Y(j+1) ≥V(k)-δmatch-p1ΔfIF 此时有一个充分不必要条件可以使[X(i),Y(j+1)]无法匹配,即: X(i)-Y(j+1)≤V(k)+δmatch-p1ΔfIF 可以化简为2δmatch (2)正确区分V(k)和V(k+1)时匹配区间的选取条件 为保证速度匹配的唯一性,应保证速度区间不会相互重叠.即有V(k+1)-δmatch>V(k)+δmatch,由V(k+1)-V(k)=2×p2×Δfd,其中p2为整数,可得δmatch 3.3.3 确定δmatch的取值范围 令ΔfIF=2Δfd,p1=p2=p,化简如下: 3Δfd≤δmatch (10) 4.1 算法设计 若上、下扫频分别检测到了N、M个目标信号,此时可能的匹配信号最多有N×M个,其中包含一些虚假目标,如图3(b).这类虚假目标可利用真实目标与调制周期无关而虚假目标与调制周期相关的特性,通过改变扫频时长Tre来消除[4,5,7,8].设第m个调制周期,TFBM算法所得到的匹配结果为: 同理在第m+1个调制周期,可以得到: (11) 4.2 虚假目标出现情况分析 根据式(1)和式(2),可以得出: (12) 4.3 用于FGTC算法的匹配条件推导 4.3.1 保证真实目标不会丢失匹配的匹配条件 (13) 根据频谱分辨率与采样时间的关系ΔfIF=2fre,得梯形波匹配之后的测量精度: (14) 类似于δmatch的求法,可以得到: (15) 4.3.2 使FGTC算法有效的匹配条件 FGTC算法的最基本的要求是,不同调制周期下同一对真实目标所产生的虚假目标无法匹配,即图8的情况不会发生.此时目标满足如下关系: (16) 4.4 距离、速度维配对算法的正确性分析 FGTC算法的核心是速度维和距离维的目标匹配.由于容差存在,配对算法只需保证不丢失应有的匹配. 4.4.1 距离维配对的正确性分析 距离维目标匹配算法若出现目标丢失,有两种可能情景,如图11所示. 综上可知,距离维配对不会出现匹配缺失现象. 4.4.2 速度维配对的正确性分析 同理,若速度维匹配时出现类似图11(a)情况,有 (17) 只要满足式(17),速度维匹配不会丢失应有配对. 5.1 TFBM算法的复杂度分析 采用2.1中的符号定义,根据图6,可以很方便得出TFBM算法的最坏时间复杂度为K(N+M).为了方便比较,采用目标数目T作为唯一参数,最坏情况下有T=K=N=M.因此TFBM算法的复杂度为2T2. 5.2 FGTC算法的复杂度分析 5.2.1 速度分组所消耗的时间和结果分析 速度分组操作是在对目标排序之后进行,排序之后的目标满足式(11).根据图7(b)可知,分组一个周期的测量结果需要遍历这个周期的所有目标数据,因此其时间复杂度为T2/4.由于速度的最大可能值只有T个,因此一次测量结果最多产生T个结果. 5.2.2 配对目标的时间复杂度和结果分析 (1)速度维配对 从图7(c)中易知其时间复杂度为2T.匹配两组长度为T的数组,最多得到T个配对结果.因此,速度组配对最多产生T对组合. (2)距离维配对 根据2.2节,每个速度组中最多含有T/2个待处理目标.类似于速度配对,匹配每一对分组内的目标的时间复杂度为T.配对所有分组目标的时间复杂度为T2. 5.2.3 FGTC算法的时间复杂度 FGTC算法的最坏情况时间复杂度为: (18) 5.3 算法性能对比 文献[6]的方法时间复杂度为T3,文献[7,8]并没有明确提出梯形周期内的中频匹配算法.TFBM算法的时间复杂度为2T2,是一种较为高效的匹配算法. 文献[1,6]采用频谱形状匹配的方法来消除虚假目标,误差大、计算量大.文献[4]没有明确提出消除算法.文献[7]采用优化目标函数的算法,提升了虚假目标的消除概率.但计算量大,枚举方法配对的复杂度为T4,由式(18)可知FGTC是一个比较高效的算法. 6.1 仿真环境与参数设置 最大不模糊测量距离由τd≤min(Tre,1,Tre,2)/2决定,其中τd=2R/c为目标回波延迟.但实际最大不模糊测量距离和速度都由采样频率决定.本次仿真最大不模糊测量距离和速度分别为200m和250km/h. 6.2 所有目标均可分辨的仿真 选取目标距离、速度见表2.将两个不同周期的TFBM算法的匹配结果和FGTC算法的结果放在一幅图上,如图12. 表2 仿真所使用的目标参数 6.3 存在不可分辨目标的仿真 修改表2目标8的速度为0.1m/s,使其与目标2不可分辨,添加目标16作为对比,其参数为(2m,1m/s).结果如图13.可以看出,在出现不可分辨的目标的情况下,本文方法可能将其看作同一目标,但是不会丢失匹配. 6.4 理想环境下随机目标仿真 为充分验证算法的性能,本文使用MATLAB的randi函数随机产生了一些可以互相分辨的目标,距离范围在200m以内,速度范围为0~±250km/h.目标环境为理想,即没有噪声和干扰,检测概率为100%,虚警概率为0%. 6.4.1 场景密集程度的定义 为验证本文方法在不同密集程度的场景下的性能,此处定义目标在距离维上的占有率为密集程度: (19) 基于式(19)定义密集程度的经验判据为:D≤2.5%认为当前场景是非密集场景,D>5%认为是密集场景,D>>5%认为是超密集场景. 6.4.2 非密集场景的仿真 令T=50.将100次仿真数据绘入图14. 6.4.3 密集场景的仿真 令T=100.将100次仿真数据绘入图15. 6.4.4 超密集场景的仿真 令T=500.将100次仿真数据绘入图16. 6.4.5 理想环境仿真结果分析 总结6.4.1至6.4.4的结果如表3.可见,本文提出的算法D≤2.5%时可近似认为不重不漏地检测出所有目标.并且任何场景下都没有丢失目标. 表3 不同密集程度下随机目标仿真结果总结 6.5 非理想环境下随机目标仿真 6.5.1 虚警情况仿真 6.5.2 漏警情况仿真 令检测概率Pd=98%,则CFAR检测器在每个扫频段产生的平均目标谱线数目为T×Pd=49.本文在产生每一段真实目标谱线后,随机删除一个目标谱线,之后采用TFBM+FGTC算法对其进行处理.在非密集场景下进行100次测试,结果如图18. 6.5.3 非理想环境仿真结果分析 在6.5.1的仿真中,每一个调频段有真实目标谱线50条,随机虚警目标谱线40条.虽然较于图14,虚假匹配的概率有所提高,但100次实验中,最多出现的虚假匹配数目不超过5个.使用本文方法将真实目标比例从原来的50/90提升到了50/55,这表明本文方法对于虚警目标具有良好的抑制能力. 在6.5.2的仿真中,每一个调频段有真实目标谱线50条,随机漏警目标谱线49条.较于图14,丢失匹配的概率从0提高到了15/50.这表明本文方法不适合用在检测概率低的环境下. 对于最大不模糊距离、速度之外的目标,在采样时出现频谱泄漏,即在测量结果中引入虚警影响.本文方法对于虚警目标具有较强的抑制能力,因此本文方法适用于抑制模糊测量范围之外的目标. 6.6 本文算法的适用性分析 本文方法在密集环境、噪声等方面的适应性如表4. 表4 本文算法的适用性分析 本文针对FMCW雷达在多目标参数测量方面的困难,提出了一种结合FMCW和CW的变周期梯形波调制方式.首次推导了梯形波调制方式在最坏情况下匹配结果的表达式;发现在目标数量较大时,梯形波体系下的最坏情况匹配结果数约为于传统三角波结果数的25%.这表明在梯形波体制下,可以产生更少的匹配结果数,可以优化后续处理的时间和空间复杂度.并且,可以通过改变梯形波调制周期,利用真实目标与调制周期无关而虚假目标与调制周期相关的特性来进一步消除虚假目标. 同时,本文还针对变周期梯形波调制FMCW雷达的实际应用,设计了两个高效的容差匹配算法TFBM和FGTC.通过理论推导证明了算法的正确性和复杂度,并在详细的仿真之后给出了算法的适应性分析.测试结果表明:本文所提出的方法在非密集场合与高检测概率的条件下不仅可以无模糊地测量多目标的速度并且具有较低的计算复杂度. 针对4.2中关于虚假目标的产生情况的分析,本文并没有深入讨论如图9和10的情况.下一步的工作就是找出调频参数与虚假目标产生概率的定量关系,并最大程度减少虚假目标的产生. [1]杨建宇,凌太兵,贺峻.LFMCW雷达运动目标检测与距离速度去耦合[J].电子与信息学报,2004,26(2):169-173. Yang Jian-yu,Ling Tai-bing,He Jun.MTD and range-velocity decouplig of LFMCW radar[J].Journal of Electronics & Information Technology,2004,26(2):169-173.(in Chinese) [2]王月鹏,赵国庆.二维FFT算法在LFMCW雷达信号处理中的应用及其性能分析[J].电子科技,2005,18(5):25-32. Wang Yue-peng,Zhao Guo-qing.The application of 2D FFT algorithm in LFMCW radar signal processing and its performance analysis[J].Electronic Science and Technology,2005,18(5):25-32.(in Chinese) [3]Rohling H,Kronauge M.New radar waveform based on a chirp sequence[A].Radar Conference (Radar),2014 International IEEE[C].Cincinnati,USA:IEEE,2014.1-4. [4]徐涛,金昶明,孙晓玮,夏冠群.一种采用变周期调频连续波雷达的多目标识别方法[J].电子学报,2002,30(6):861-863. XU Tao,JIN Chang-ming,SUN Xiao-wei,XIA Guan-qun.A novel method to identify multi-target by FMCW radar[J].Acta Electronica Sinica,2002,30(6):861-863.(in Chinese) [5]郑远,温博,马瑞平.基于双周期锯齿波LFMCW的距离速度去耦合[J].电子科技,2013,26(7):125-133. ZHENG Yuan,WEN Bo,MA Rui-ping.Range-velocity decoupling based on dual period saw-tooth wave LFMCW radar[J].Electronic Science and Technology,2013,26(7):125-133.(in Chinese) [6]Hyun E,Lee J H.A method for multi-target range and velocity detection in automotive FMCW radar[A].Intelligent Transportation Systems,2009.ITSC'09.12th International IEEE Conference on IEEE[C].St Louis,USA:IEEE,2009.1-5. [7]Fan Y,Xiang K,An J,et al.A new method of multi-target detection for FMCW automotive radar[A].Radar Conference 2013,IET International[C].Xi′an,China:IET,2013.1-4. [8]薛效龙.基于梯形波FMCW雷达的多目标探测技术的研究[D].杭州:杭州电子科技大学,2014. [9]BLAKE S.OS-CFAR theory for multiple targets and nonuniform clutter[J].IEEE Transactions on Aerospaces & Selectronic Systems,1988,24(6):785-790. 邢自然 男,1992年3月出生,山西长治人,2013年毕业于中北大学电子科学与技术系,其后进入上海科技大学信息科学与技术学院.现为硕博连读生,从事高维信号处理方面的有关研究. E-mail:xingzr@shanghaitech.edu.cn 朱冬晨 女,1991年1月出生,山东德州人,2013年毕业于武汉大学电子信息工程系,其后进入中科院上海微系统与信息技术研究所.现为硕博连读生,从事数字信号处理方面的有关研究. 金 星 男,1967年4月出生于吉林,中国科学院上海微系统与信息技术研究所研究员、博士生导师.1989年于吉林大学获物理学士学位,1995年于大连理工大学获微电子材料博士学位,1999年于欧洲微电子研发中心(IMEC)获微电子材料与器件博士后.目前主要从事微电子技术的研究,总线类汽车级芯片(LIN/CAN)设计、生产和应用,引导汽车级集成电路的可靠性研究. An Effective Method for Multi-target Range and Velocity Measurement in FMCW Radar XING Zi-ran1,ZHU Dong-chen2,JIN Xing2 (1.SchoolofInformationScienceandTechnology,ShanghaiTechnologyUniversity,Shanghai200120,China;2.ShanghaiInstituteofMicrosystemAndInformationTechnology,ChineseAcademyofSciences,Shanghai200050,China) In order to realize unambiguous multi-target range and velocity measurement in FMCW (Frequency Modulation Continuous Wave) radar,a trapezoid waveform modulation is proposed and its worst-case matching numbers is derived.Then two processing algorithm,TFBM and FGTC,and their matching condition have been innovatively designed.TFBM (Tolerance-Fast Beat frequency Matching) algorithm can quickly find all possible results for each period.FGTC (Fast Ghost Targets Canceling) algorithm can quickly eliminate the ghost targets which are caused by TFBM algorithm.Strictly theoretical derivation and simulation results show that the joint use of TFBM and FTGC algorithm on trapezoid waveform radar can not only measure multi-target range and velocity without ambiguity,but also reduce the computational complexity significantly. FMCW;trapezoid waveform modulation;multi-target measurement;range-velocity decoupling;fast pairing algorithm 2015-01-08; 2015-08-04;责任编辑:梅志强 TN957.51 A 0372-2112 (2016)09-2148-010 ��学报URL:http://www.ejournal.org.cn 10.3969/j.issn.0372-2112.2016.09.019


4 虚假目标消除算法FGTC












5 算法复杂度分析与比较

6 算法仿真与分析










7 总结



