深水油气田电液复合式水下分配单元设计
2016-11-22方乐崔岩
方 乐 崔 岩
(上海工程技术大学机械工程学院,上海 201620)
深水油气田电液复合式水下分配单元设计
方 乐 崔 岩
(上海工程技术大学机械工程学院,上海 201620)
分析了电液复合式水下分配单元的基本构成与功能。为提供多个水下设备的阀门执行器同时动作所需的液压动力,提出液压分配单元的管路结构优化设计方案,并对其流动情况进行了模拟仿真验证。提出以光功率分配器为核心的电气分配单元设计方案,建立基于光功率分配器的下行控制信号传输模型,并采用Optisystem软件模拟验证了其可行性。
电液复合式 水下分配单元 液压结构 光功率分配器
随着海洋油气田开发不断向深海推进,复合电液控制技术作为现阶段具有明显优势的成熟技术在深海油气田水下生产系统中得到广泛应用。电液复合式水下分配单元作为电液复合水下控制系统的枢纽,其研发、制造的核心技术由国外FMC、GE及PROTEC等公司掌握,目前国内尚无这方面的成熟产品。因此电液复合式水下分配单元的研制对加快我国深海油气田生产设备自主开发具有重要意义[1,2]。
1 电液复合式水下分配单元的基本构成与功能
电液复合式水下分配系统包括脐带缆终端头和水下分配单元两部分,其中水下分配单元由液压分配单元和电气分配单元组成[3]。脐带缆终端头与脐带缆相连,实现将液压和电气管线从水面到水下的分配传输。液压分配单元通过液压飞线与脐带缆终端头相连,在内部金属管路上将输入端的高、低压液压液和各类化学药剂分配输送到液压分配单元的输出端,以实现为控制设备提供液压动力和为水下生产设备提供化学药剂的功能。电气分配单元也采用电气飞线和脐带缆终端头相连的方式,电气分配单元通过分线盒对输入的光(电)信号、电力实现分支输出,以实现为各水下控制模块提供控制信号和电力的功能,且电气分配系统必须设置有电气线路隔离装置以实现隔离故障电路的功能[4]。
海水高静压、海水腐蚀等恶劣条件都对处于深海的电液复合式水下分配单元的性能提出更高的要求。笔者以荔湾3-1深水油气田为例,分析并设计电液复合式分配单元的结构。
2 液压分配单元
2.1液压分配单元结构分析
液压分配单元主要由结构框架、内部液压管路、水下多路快速接头固定端、网纹板及水下机器人操作把手等组件构成,其中结构框架起着保护、支撑内部液压管路结构和其他液压分配组件的作用[5]。水下多路快速接头通常由相互配合的两子组件构成,其固定端安装在水下设备(如脐带缆终端头、水下分配器及采油树等)上,活动端与液压飞线末端连接组成活动连接头。网纹板用于保护液压管路同时便于水下机器人对结构内部情况进行观察。水下机器人把手则为水下机器人作业提供支撑。
液压分配单元设计的主要难点是内部液压管路的设计,液压管路设计方案的优劣直接影响控制系统的性能。因此需优化液压分配管路以满足水下生产系统的多种复杂工况。
2.2液压管路设计和数值模拟计算
根据结构框架和输入、输出端布置情况,设计的液压分配单元中的某一条液压管路结构如图1所示。设计的液压控制管路总体为对称布置的六支管结构,输入、输出端口设置有液压连接器,采用三通结构实现分支。液压液通常从输入端1输入,由三通分支结构3实现流体分支分配,再经由支管4输出。每根支管上均可设置一个隔离球阀实现故障液压管路的隔离,通常由水下机器人操作。
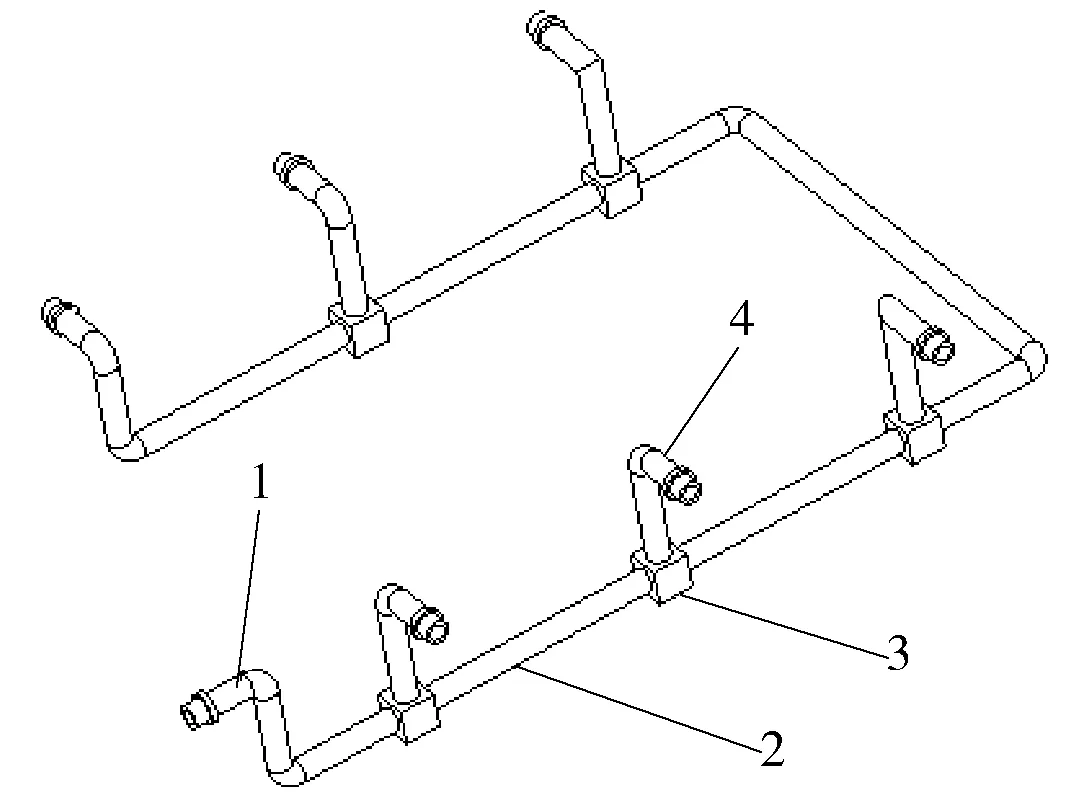
图1 液压分配单元某一管路结构1——液压连接器(输入端); 2——液压管路;3——三通分支结构; 4——液压连接器(输出端)
水下控制模块接收来自主控站的控制信号后,按照预先设置的动作顺序启闭电磁先导阀,液压系统则为之提供足够的液压动力。但多个采油树上的执行器同时工作时,液压系统经水下分配单元分支后也应确保提供的液压液足够使采油树的阀正常启闭,因此液压分配单元的管道设计关键之一是确保液压分配管路具有一定的均匀性。
液压管路流体分配属于多支管分配问题,通常采用质量守恒和动量守恒对流体进行总体衡算[6]。针对多个水下生产设备阀门同时动作的工况,笔者采用ANSYS14.0中的Flunt模块分析液压分配管路,优化管路结构以保证各水下设备的正常工作。
根据荔湾3-1油气田实际生产情况并结合上述设计的液压分配管路,仿真分析方案采用保持进口管直径和支管直径为1/2″不变而改变总管直径的方法来分析管路优化结构。主管直径分别选取5/4″、1″、3/4″和1/2″,支管直径1/2″,支管间距10″,支管和主管垂直相交,并对支管从左至右按1~5编号。主管左边为高水基液压油的进口,进口流量为8L/min。水下生产系统液压油选用高水基液压油,高水基液压油密度为999.1kg/m3,运动粘度为8.49235×10-4kg/(m·s)。
根据分配管流动理论,易知液压分配管路的支管背侧涡流尺寸对支管流量均分影响很大,因此为保证液压分配管路分配均衡性需减小支管涡流尺寸。因支管数目较多而支管1的涡流尺寸最大,选择支管1的流速矢量放大图分析液压管路结构的优劣。图2为在不同总管直径下,支管1管道流速矢量放大图。比较图2b、c、d速度矢量图,易知在总管直径为1″时,支管1中涡流的尺寸最小,即随着总管管径增大,管路结构流量分配均匀性提高。由图2a可知在总管直径为5/4″时,支管1的涡流尺寸较总管直径为1″的涡流尺寸略小。
由以上研究表明,在进口流量不变的情况下,随着总管直径的增大,支管1内部的漩涡尺寸减小,支管流量均匀程度变好。总管直径为1″的管路虽较总管直径为5/4″均匀性略有不如,但总管与支管直径比小,因此选择总管直径为1″的液压管路结构更为合适。
脐带缆输送低压液压油的管路直径选1/2″。目前常见的液压分配单元的液压分配管路总管直径和支管直径保持相同,由Fluent仿真模拟得到管道流速云图,如图3a所示。由图3易知,总管沿路由于分流作用速度逐渐减小,前三根支管的分流作用有限而最后两根支管流量急剧增加,即支管管径为1/2″时,液压分配均匀性较差。而图3b为总管尺寸为1″时的速度云图,主管沿路的流体经支管分流后,流速下降,各支管流速都比较均匀,基本达到优化管路分配结构的目的。
通过以上分析可知,在支管尺寸为1/2″时,选择主管与支管的直径比为2∶1,流量分配的均匀程度较好。这种管道结构中总管直径较大从而降低了总管流速,支管涡流尺寸也减小,流量均匀程度提高,可满足多个水下生产设备执行器同时动作所需的液压动力。
3 电气分配单元结构
3.1电气分配单元结构分析
电气分配单元不仅要实现控制电缆的分支和光纤的分光,还要对输出电缆和光纤进行编组,以保证同一水下控制模块的冗余电气飞线的光纤和电缆具有不同路径[7,8]。电气分配单元主要包括结构框架、电气分线盒、网纹板及水下机器人操作把手等部件,其关键部件电气分线盒由电力分配模块、光信号分配模块和机械模块3部分组成。现有的电气分配单元结构根据安装位置可分为内置式和外置式两类。
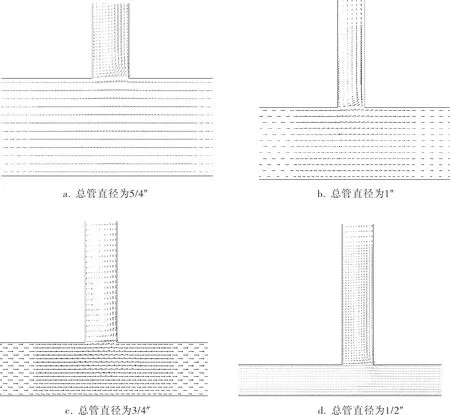
图2 不同总管直径尺寸下支管1的流速矢量图
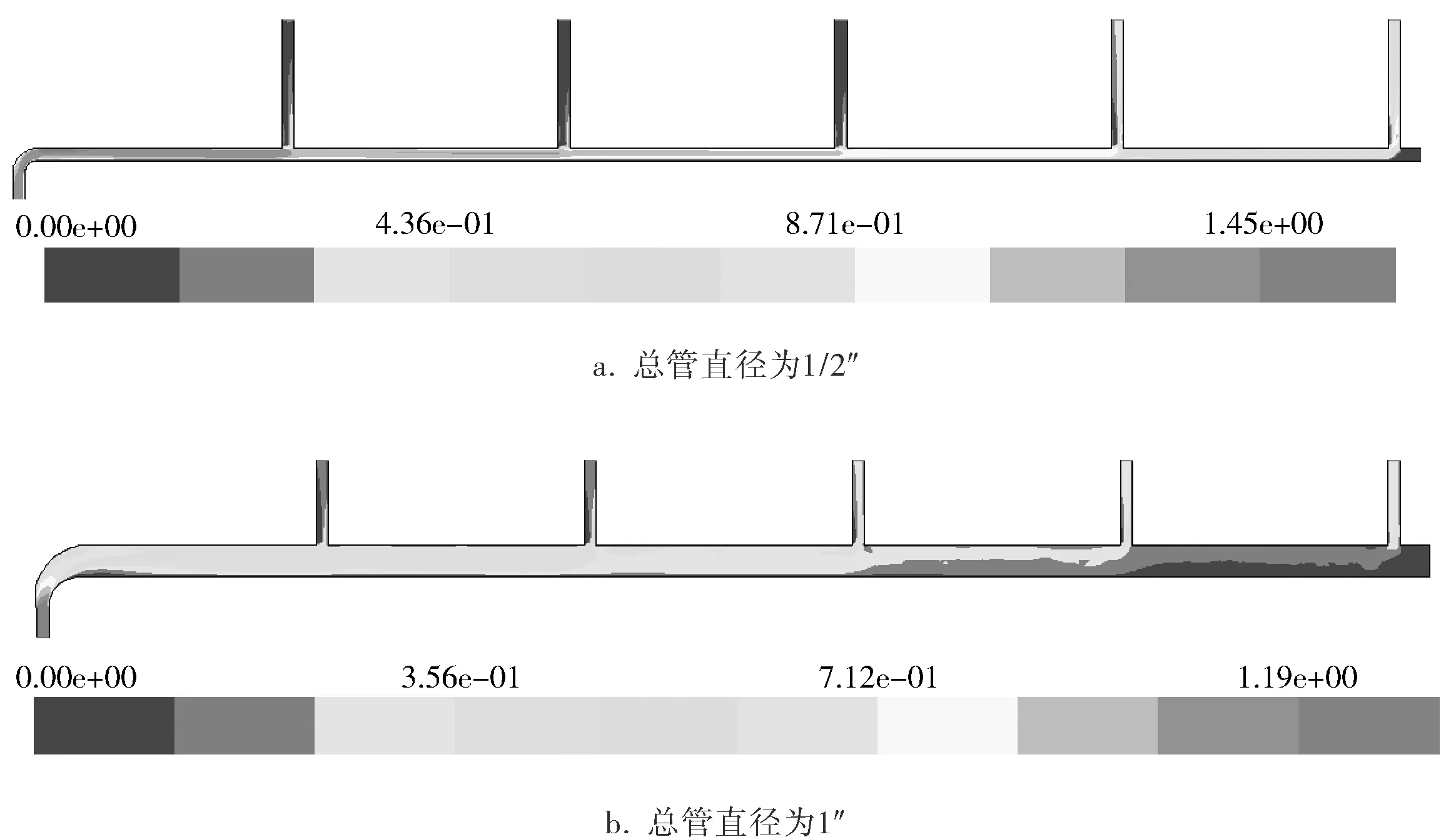
图3 不同总管直径下的液压分配管路速度云图
3.2电气分配单元的光信号分配模块设计
随着水下生产控制系统的数据采集量不断增加,传统电力载波的通信方式无法满足大数据量的传输要求,光纤通信系统因其传输距离长、带宽高、衰减低及受电磁干扰小等特点,在深海长距离水下生产控制系统中得到越来越多的应用。
根据水下生产控制系统中主控站与各水下控制模块的通信特点,光纤通信系统设计方案采用双纤光端机接发光信号,系统的下行控制信号(从主控站到水下控制模块)通信采用点对多点(P2MP)传输方式,而上行生产状态信息(从水下控制模块到主控站)通信采用点对点(P2P)传输方式。水下电气分配单元采用光功率分配器实现下行控制信号由一条光纤均匀分配给多条光纤,控制信号以广播方式传输到各水下控制模块。水下电子模块通过数据帧前导码的标识来识别发送给自己的控制信号,从而通过电子模块里的微处理器及电磁阀驱动器等元器件驱动电磁阀线圈,进而控制电磁阀的换位达到启闭阀门的控制目的[9]。在上行方向,各水下控制模块通过各自独立的光纤向主控站传输水下生产设备的生产状态及水下控制模块的运行状况等信息。
以荔湾3-1油气田西区为例,由于西区有5口井,因此电气分配单元至少要提供10个光电混合输出。从水下分配中心到西区的内部脐带缆有两根8芯光缆,两根光缆一用一备且分配结构和编组采用相同的方式,共同组成12个光电混合连接器[10]。水下电气分配单元的光信号分配模块以1×6光功率分配器为核心,将下行信号分配给6个输出端传输给水下控制模块。为确保水下控制模块按主控站发出的控制命令驱动电磁先导阀控制相应的阀门和油嘴,采用Optisystem模拟仿真基于光分配器的下行控制信号光纤通信线路,并验证以光功率分配器为核心的电气分配单元的可行性和光分配单元对光信号传输质量的影响[11]。
通信系统传输速率设定为1.25GHz,激光器光源功率为15dBm,使用G.563型光纤,其部分性能参数如下:
参考波长 1550nm
损耗系数 0.25dB/km
色散系数 3.5ps/(nm·km)
色散斜率 0.085ps/(nm2·km)
仿真模型中光信号发射装置位于水上主控制台,光功率分配器位于电气分配模块内,而水下控制模块中的通信模块用仿真模型光接收器元件表示,对相关元件设置参数后进行模拟仿真计算。下行控制信号通信线路仿真模型和接收端的眼图如图4、5所示。
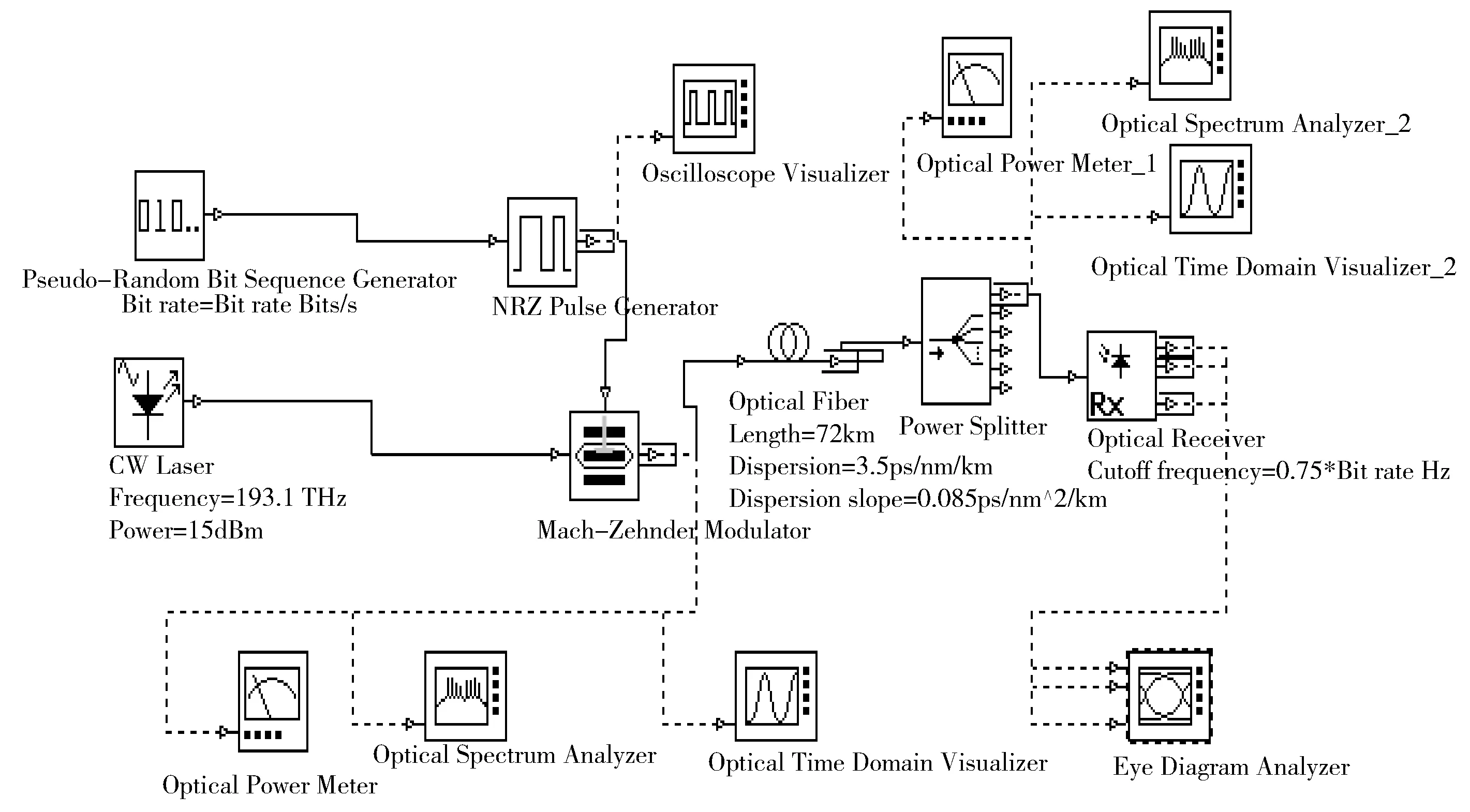
图4 下行控制信号通信路线仿真模型
仿真结果表明:无源光功率分配器对光信号分发起着不可或缺的作用,分光器将下行控制信息以广播方式传输至各个水下控制模块。并且分光器的插入损耗越小,光信号接收机接收到的光信号质量越好,传输距离越远。眼图在张口最大处的Q值为62.9,远大于7,信号的误码率为0,这表明在以光功率分配器为核心的电气分配单元可顺利实现下行控制信号分配,各水下控制模块均能顺利接收到主控站发出的控制命令。
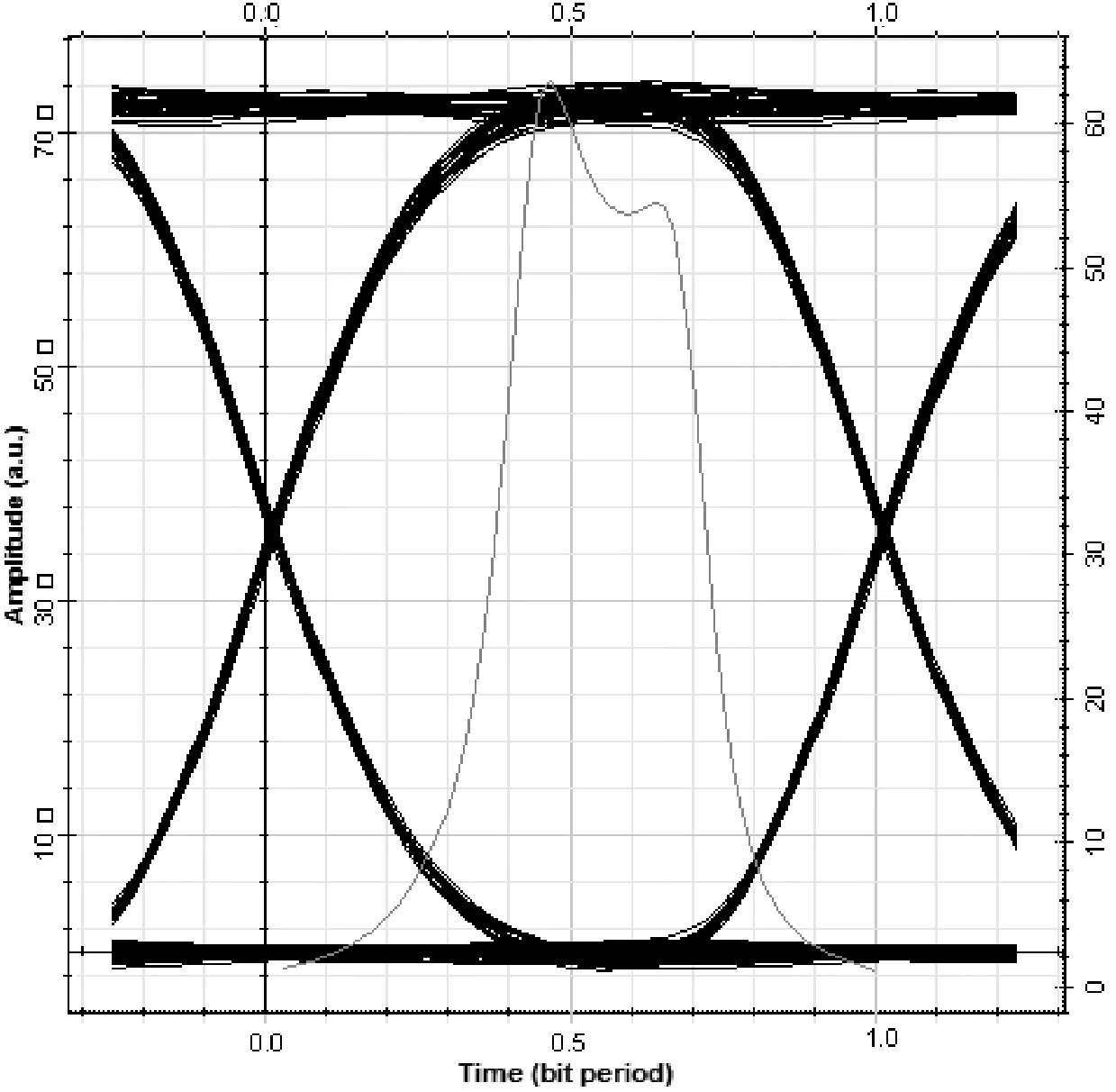
图5 通信系统眼图
4 结论
4.1液压分配单元的总管和支管直径比例对油液分配均匀性方面有较大影响,模拟仿真结果显示,当脐带缆液压管路为1/2″,液压分配单元内部管路采用总管与支管直径比为2∶1的结构,流体分配均匀性较好。
4.2基于光功率分配器的下行控制信号光纤传输方案能够实现面对多口油井的信号分配功能,仿真运行结果表明控制信号传输模型的通信质量良好,以光功率分配器为核心的电气分配单元可实现光信号的顺利分配,水下控制模块接收到光信号的误码率为0。
4.3笔者提出的电液复合式水下分配单元设计方案满足生产要求,能够实现深水油气田水下生产系统的电液动力供应功能。
[1] 郝亚冲,程武山,张鹏举,等.深海油气田水下控制器的设计开发[J].化工自动化及仪表,2015,42(2):139~143.
[2] 单日波.我国深水海洋油气田开发现状分析[J].中国造船,2012,53(z1):274~278.
[3] 胡雪峰,封延松.电液复合式控制系统的组成及分析工况[J].中国造船,2012,53(z1):189~199.
[4] 苏锋,刘立新,张磊,等.水下电液分配装置[P].中国:201410105268.1,2014-06-25.
[5] 程友祥,田龙,章涛.深水管线多回路跨接系统及其测试安装方法[P].中国:201310753032.5,2013-12-31.
[6] Wang J Y.Theory of Distribution in Manifolds[J].Chemical Engineering Journal,2011,168(3):1331~1345.
[7] Bai Y, Bai Q.Subsea Engineering Handbook[M].Holland:Elsevier,2010.
[8] ISO 13628-6,Subsea Production Control Systems[S].Geneva:ISO,2006.
[9] 王俊明.测试用水下采油树控制模块研制[D].哈尔滨:哈尔滨工程大学,2013.
[10] Bavidge M.Husky Liwan Deepwater Subsea Control System[R].Houston:OTC,2013.
[11] 孙哲,王平,施智.基于OptiSystem的海光缆链路传输性能仿真研究[J].计算机与数字工程,2014,42(11):2073~2077.
DesignofElectro-HydraulicMultiplexedSubseaDistributionUnitforDeepwaterOilandGasFieldDevelopment
FANG Le, CUI Yan
(CollegeofMechanicalEngineering,ShanghaiUniversityofEngineeringScience,Shanghai201620,China)
Both basic components and functions of electro-hydraulic multiplexed subsea distribution unit were analyzed. In order to provide the hydraulic pressure needed for valve actuator, the optimized design scheme for the pipeline structure of the hydraulic distribution unit was proposed and verified through simulating flow condition in the hydraulic pipeline. The optical power splitter-cored design scheme for the electrical distribution unit was presented and the downlink control signal transmission model based on the optical power splitter was established and the Optisystem software adopted verifies its feasibility.
electro-hydraulic multiplexed, subsea distribution unit, hydraulic structure, optical power splitter
TH86
A
1000-3932(2016)03-0280-05
2016-01-19(修改稿)