具有随机丢包的非线性网控系统的鲁棒H∞故障检测
2016-11-22李艳辉
李艳辉 高 源
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
具有随机丢包的非线性网控系统的鲁棒H∞故障检测
李艳辉 高 源
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
针对具有模型不确定性和状态时滞的非线性网控系统,对它具有随机丢包的鲁棒H∞故障检测问题进行研究。采用动态故障检测滤波器构造残差产生器,将鲁棒H∞故障检测问题转化成H∞滤波器设计问题。所设计的鲁棒故障检测滤波器保证了故障检测系统均方渐近稳定且具有特定的H∞性能指标γ。数值仿真结果表明:利用该方法能够迅速准确地检测出系统的故障信号。
鲁棒故障检测 滤波器 非线性网控系统 随机丢包H∞性能指标γ数值仿真
现代化工工艺越来越复杂,各类化工生产过程中的安全事故,如反应器升压爆炸、有害气体泄漏及阀门断裂等时有发生。故障检测(Fault Detection,FD)作为保证化工过程平稳、可靠运行的重要手段,近年来逐渐成为研究热点[1,2]。为提高FD效率,通常采用基于解析模型的方法,此方法需建立精确的数学模型。然而在实际工艺流程中,模型误差、外部干扰等因素大量存在,会在一定程度上导致FD漏检、误检,因此,基于鲁棒滤波的FD方法引起了广泛关注[3,4]。
由于通信网络的快速发展,为提高设备性能,工业领域的网控系统得到了研究和发展[5,6]。但与此同时,也引入了诸多网络问题,使FD变得更为复杂[7],其中一个重要问题就是数据包丢失[8,9]。文献[8]考虑到数据丢包的影响,将网控系统建模为Markov跳变线性系统,从而进行FD。文献[9]考虑到单通路丢包和非线性项的网控系统,运用基于鲁棒滤波的方法,对故障信号进行估计与检测。因此,在FD领域中对带有随机数据包丢失的非线性网控系统进行研究具有现实意义。
在此,笔者对具有随机丢包的非线性网控系统的鲁棒H∞故障检测问题进行研究,设计了一种动态鲁棒FD滤波器用以产生残差信号,将鲁棒H∞故障检测滤波器设计问题转化为鲁棒H∞滤波器求解问题,从而在一定程度上降低了残差信号与故障信号之间的差值,并使残差信号对系统不确定性具有较好的鲁棒性,采用阈值逻辑法对故障信号进行检测,使系统的抗干扰能力得到进一步增强。
1 问题描述①
考虑如下非线性离散系统:
(1)
其中,x(k)∈Rn、u(k)∈Rm、y(k)∈Rr分别为系统状态、控制输入和测量输出;ω(k)∈Rq为属于l2[0,∞)的扰动输入;f(k)∈Rp为故障信号;τ为时滞常数;φ(θ)为[-τ,0]内给定的初始条件序列;A、Aτ、B、G、Bω、Bf、C为具有适当维数的常数矩阵;ΔA、ΔAτ、ΔB为时变参数不确定矩阵,并满足:
[ΔAΔAτΔB]=HF(k)[E1E2E3]
(2)
其中,H、E1、E2、E3为具有适当维数的常数矩阵;F(k)为未知时变矩阵,且满足FT(k)F(k)≤I;g(k,x(k))为已知的非线性函数,具有Lipschitz特性:
‖g(k,x(k))‖≤‖ρx(k)‖,ρ>0
(3)
由于网络中存在随机丢包现象,传感器的测量值y(k)到达FD滤波器的值为:
(4)

(5)
构造一种FD滤波器,即残差产生器:
(6)
考虑控制器到执行器通路存在丢包现象,则控制器为:
(7)


(8)

(9)
同时考虑式(1)、(4)、(6)、(7),可得FD系统为:
(10)

笔者的目标是设计如式(6)所示的鲁棒FD滤波器,使系统(式(10))满足:当v(k)=0时,FD系统均方渐近稳定;零初始条件下,对于任意非零的v(k)∈l2[0,∞),残差误差信号满足H∞性能指标。即:

(11)
其中,γ>0为干扰抑制水平。
最后,基于所设计的鲁棒FD滤波器,采用阈值逻辑法对故障进行检测,即:
Jr(k)>Jth⟹有故障⟹报警
Jr(k)≤Jth⟹无故障
(12)
式(12)中的残差评价函数Jr(k)和阈值Jth分别为:

(13)
其中,k0为初始评价时刻;T为评价步数。
引理2 给定适当维数的矩阵Y、E、F,其中Y=YT,则Y+EΔF+FTΔTET<0,对所有满足ΔTΔ≤I的矩阵Δ成立,当且仅当存在常数ε>0时,使Y+εEET+ε-1FTF<0。
2 H∞性能指标分析
考虑式(10),选取适当的Lyapunov函数,以得到使系统均方渐近稳定且具有鲁棒H∞性能指标γ的FD滤波器存在的充分条件。
(14)

证明 选取Lyapunov函数,即:

(15)
其中,P∈R2n×2n、Q∈Rn×n为正定对称矩阵;ημ(k)=η(k+μ),μ∈[-τ,0]。
E{ΔV(ημ(k))}=E{V(ημ(k+1))}-E{V(ημ(k))}
=ξT(k)Mξ(k)

由式(3)可得:
gT(k,x(k))g(k,x(k))-ρ2xT(k)x(k)=ξT(k)M1ξ(k)≤0
(16)
其中,M1=diag{M11,0,I,0},M11=diag{-ρ2I,0}。
当v(k)=0时,根据引理1和式(16),若式(17)成立,则可推出E{ΔV(ημ(k))}<0。而根据式(14)和Schur补引理可知:
(17)

根据引理1和式(16)可知,当式(14)成立时有:

(18)
零初始条件下,将式(18)从0~∞求和,因为E{V(ημ(0))}=0,E{V(ημ(k))}|k→∞=0,所以式(18)可整理为式(11)的形式,即系统具有H∞性能指标γ。
3 鲁棒FD滤波器
基于定理1,笔者进一步提出了鲁棒FD滤波器的求解方法,并以线性矩阵不等式的形式给出了该FD滤波器的存在条件与参数化矩阵表示形式。
(19)
X-R>0
(20)
(21)
证明 应用Schur补引理和引理2,不等式(14)等价于:
(22)

将P和P-1分解成如下矩阵并定义J:


S1=P12AFN1,S2=P12BF,S3=CFN1,U1=ε1E3KN1,
U2=ε2E3KN1
(23)
可推得不等式(19)成立,定理得证。
由式(23)可得滤波器参数矩阵为:
(24)

Try(z)=S3[zI-(R-X)-1S1]-1(R-X)-1S2+DF
由此可得,式(21)成立。
γ可作为一个优化变量得到系统最优扰动衰减水平,通过求解式(25)所示的凸优化问题:
minγ2
s.t.(19),(20)
(25)
得到形如式(6)的鲁棒FD滤波器。
4 数值仿真
故障信号与干扰信号分别为:


其中,n(k)为均匀分布在[-0.01,0.01]的随机噪声信号。

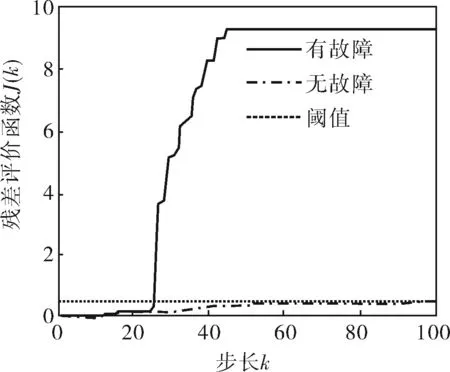
初始条件为x(0)=[0 0]T,xf(0)=[0 0]T,仿真结果如图1、2所示。取报警阈值Jth=0.5213,从图1、2中可以看出,当故障发生时(即步长k=25时),残差信号与残差评价函数均有明显变化且J(25)=0.36223 图1 残差信号 图2 残差评价函数 笔者考虑到在带有双通路随机丢包非理想网络环境下,具有模型不确定性和状态时滞的非线性离散系统的鲁棒FD问题,设计了一种鲁棒H∞故障检测滤波器,该FD滤波器不仅对故障敏感,而且对扰动具有良好的鲁棒性。最后通过数值仿真进一步验证了笔者所提方法的有效性。 [1] 陈琼.状态监测与故障诊断技术在大型机组中的应用[J].化工自动化及仪表,2014,41(10):1203~1205. [2] Kargar S M,Salahshoor K,Yazdanpanah M J.Integrated Nonlinear Model Predictive Fault Tolerant Control and Multiple Model Based Fault Detection and Diagnosis[J].Chemical Engineering Research & Design,2014,92(2):340~349. [3] 丁强,钟麦英.一类线性Markov跳跃区间时滞系统的鲁棒H∞故障检测滤波器设计[J].控制与决策,2011,26(5):712~716. [4] Wang H R,Wang C H,Gao H J.An LMI Approach to Robust Fault Detection Filter Design for Uncertain State-Delayed Systems[C].Advances in Machine Learning and Cybernetics.Guangzhou:Springer Berlin Heidelberg,2006:112~121. [5] Rahmani B,Markazi A H D.Networked Control of Industrial Automation Systems—A New Predictive Method[J].The International Journal of Advanced Manufacturing Technology,2012,58(5):803~815. [6] 王明明,王青,董朝阳.飞行器网络控制系统在线故障检测算法[J].北京航空航天大学学报,2012,38(6):750~754. [7] Fang H J,Ye H,Zhong M Y.Fault Diagnosis of Networked Control Systems[J].Annual Reviews in Control,2007,31(1): 55~68. [8] 黄鹤,谢德晓,韩笑冬,等.具有随机丢包的一类网络控制系统的故障检测[J].控制理论与应用,2011,28(1):79~86. [9] 何潇,王子栋,吉吟东,等.一类非线性网络化系统的鲁棒故障检测[J].空间控制技术与应用,2010,36(5):7~12. [10] Li J G,Yuan J Q,Lu J G.Observer-basedH∞Control for Networked Nonlinear Systems with Random Packet Loss[J]. ISA Transactions,2009,49(1):39~46. LI Yan-hui, GAO Yuan (SchoolofElectricalEngineeringandInformation,NortheastPetroleumUniversity,Daqing163318,China) RobustH∞FaultDetectionforNonlinearNetworkedControlSystemwithRandomPacketDropout Regarding the nonlinear networked control system which boasting of model uncertainty and state delay, its robustH∞fault detection troubled by the random packet dropout was investigated, in which, having a dynamic fault detection filter employed as a residual generator and having robustH∞fault detection converted into theH∞filter design problem so that designed robust fault detection filter (RFDF) can make the fault detection system’s mean-square asymptotically stable and to satisfy a prescribedH∞performance indexγ. A numerical simulation result shows that this proposed approach can detect the fault fast and precisely. robust fault detection, filter, nonlinear networked control system, random packet dropout,H∞performance indexγ,numerical simulation 2015-09-09(修改稿) 黑龙江省自然科学基金资助项目(F201403);黑龙江省博士后科学研究发展基金资助项目(LBH-Q13177);东北石油大学培育基金资助项目(XN2014112);空间智能控制技术国家级重点实验室开放基金资助项目(002008834000) TH865 A 1000-3932(2016)04-0402-06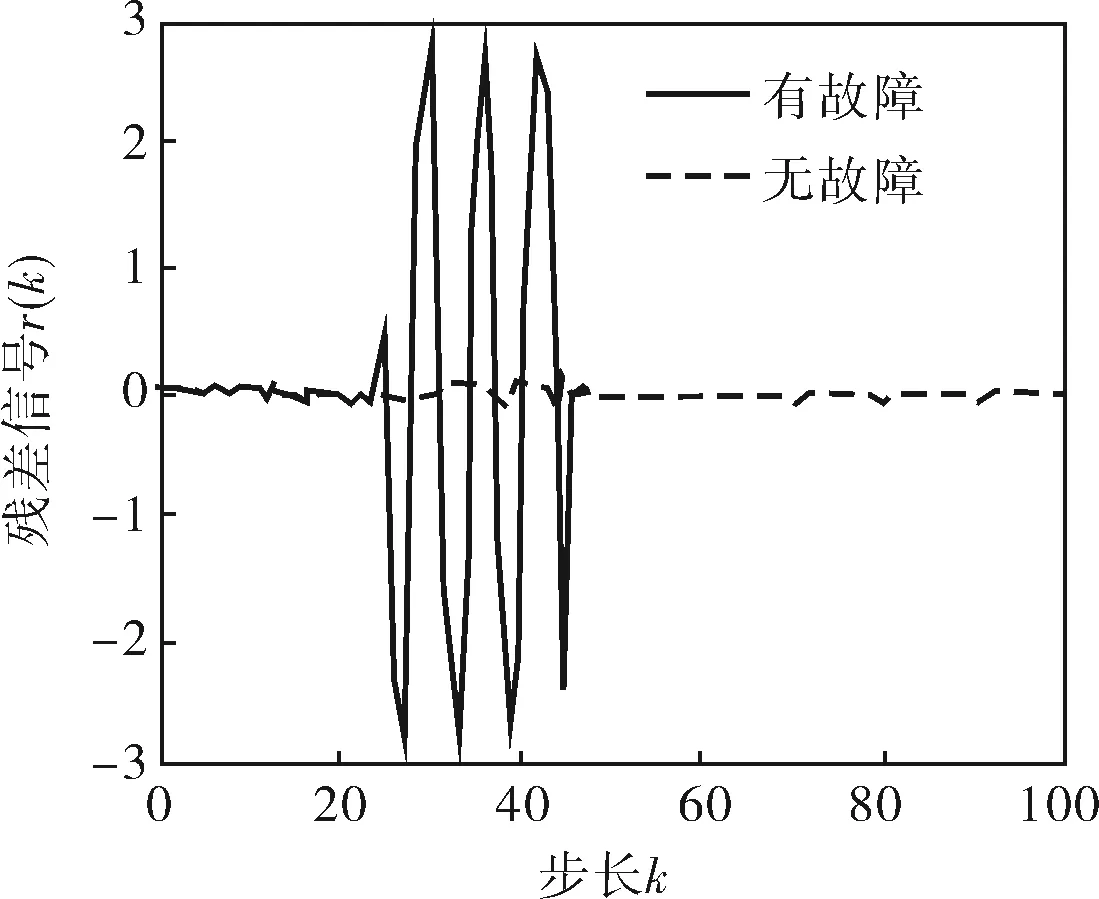
5 结束语
