气动搬运机械手的设计及其应用
2016-11-21成经平
成经平,孙 颖
(湖北理工学院 机电工程学院,湖北 黄石 435003)
气动搬运机械手的设计及其应用
成经平,孙 颖
(湖北理工学院 机电工程学院,湖北 黄石 435003)
研究气动搬运机械手在输送系统中的应用。根据需求,拟定机械手的总体设计方案,对机械手的各个关键部分进行设计,完成了控制系统的设计。该机械手具有4个自由度,可用于生产线上棒料等工件的搬运;采用气动驱动机械手,控制方式采用可编程控制器-传感器-气动元件的高精度反馈控制模式。气动搬运机械手在物料智能输送系统中具有极高的应用价值。
机械手;气动;PLC;智能输送
搬运机械手是在智能物流装备中被广泛应用的一种工业自动化产品,其主要功能是抓取工件并搬运到生产线上。气动搬运机械手作为一种典型的机电一体化装置,其优点是:结构简单、维修方便、成本低、节能环保等,它的出现将产品的机械化大生产推向了又一个新的高度。机械手能代替人类做很多事情,有的是人类能完成但比较枯燥或劳动强度特别大的,也有的是比较危险的,如高温、高压的恶劣环境。气动机械手的应用愈来愈广泛,目前多数应用在物料等输送过程中,主要是在有关机械的零部件生产中负责装卸、搬运所要加工的毛坯或成品。由于其结构紧凑、适用性强,适合中、小批量生产。
1 物料搬运机械手总体方案设计
根据设计要求,采用圆柱坐标式气动机械手,其功能是可以实现物料的上升与下降、伸长与收缩、水平回转3种动作。其结构形式构造简洁,直观性较好,占据的空间位置小,活动范围大,所以被广泛应用。总体结构由手部、手腕、手臂、立柱、底座五大部分组成。
为了实现搬运工件的功能机械手应该完成的动作有:
①机械手手臂右转;②手腕顺时针转动90°;③机械手伸长一定距离,使得机械手末端执行器能到达物料的正上方;④机械手手臂下降一定距离,与物料处于水平后手爪夹紧;⑤机械手手臂上升,手臂缩短,腕部逆时针旋转90°,手臂底座右转回到起点;⑥延时过后机械手手爪松开,物料放在生产线上。
该物料气动搬运机械手搬运物料所花费的时间为6 s左右,其中,机械手底座回转时间为2 s,手臂上升和下降时间为0.5 s,手臂夹紧和松开时间为0.4 s,手腕的转动时间为0.6 s。
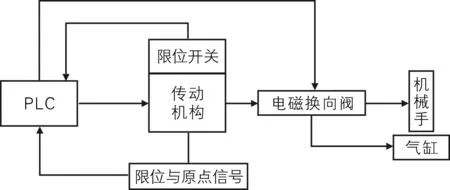
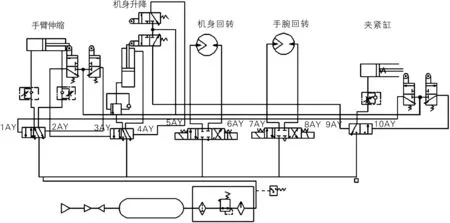
外部控制部分简图如图1所示。
2 手部夹持力的设计计算
齿轮齿条式手部简图如图2所示。物料气动搬运机械手设计中,功能需求中最重要的是手部夹持力,它不仅说明其应用的范围,同时也是物料气动搬运机械手设计中气缸选用的重要依据。
设定夹持工件的重量G为5 kg,“V”形手爪张开角θ为60°,手爪回转中心到工件的距离b为120 mm。查阅文献[6]可知,摩擦系数f=0.10,摩擦角φ=tan-1f=5°50'。
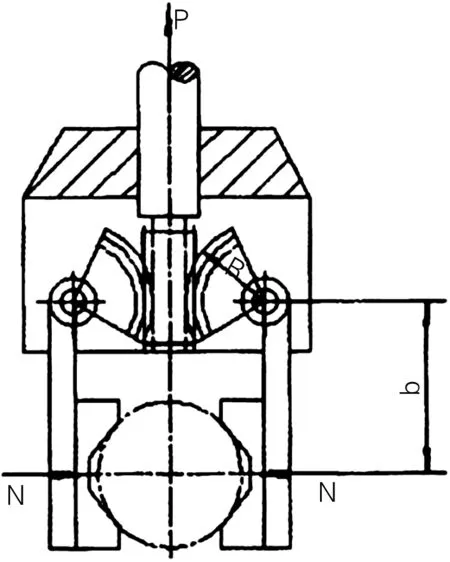
依据设计要求R取50 mm。 根据手指夹持部位的范围,按强度计算公式:
N=0.5Gtan(θ-φ)=0.5×5×9.8×tan(60°-5°50')≈50.61(N)

手爪处的气缸处在夹持物料状态时所需的驱动力:

3 气压传动系统工作原理
搬运机械手的驱动部分采用的是压缩空气,气压传动系统工作原理如图3所示。该系统的气体来源是空气压缩机产生的气压大于4~6个大气压的气体,经过快换接头进到出气罐,经分水过滤器、油雾器等,最后进入到并联气路中的电磁阀,以此来控制气缸和机械手的相关动作。
4 PLC气动控制系统的设计
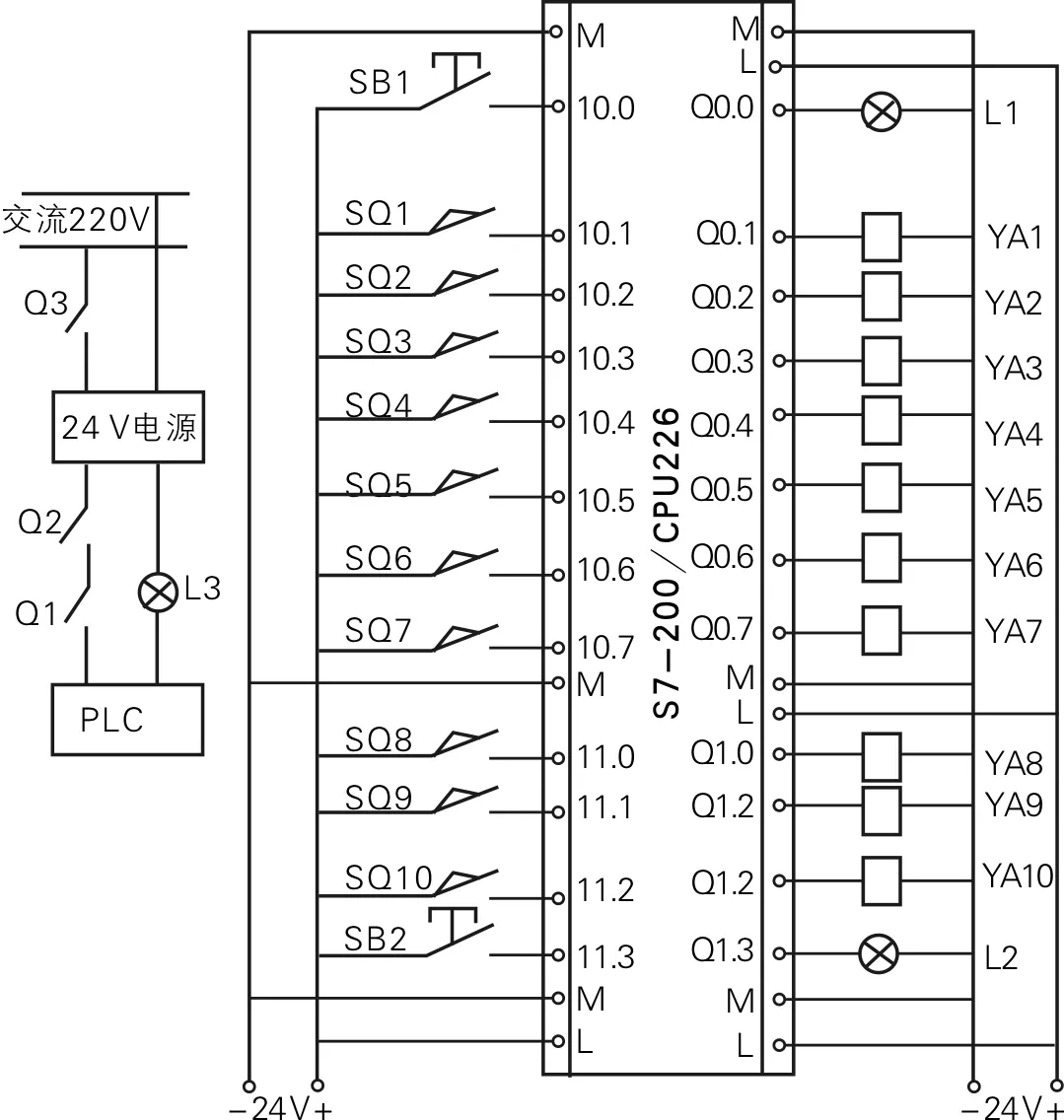
根据搬运物料、搬运过程和搬运工序对控制系统的要求,PLC控制系统需要输入端子和输出端子分别为12个,PLC的I/O分配及确定见表1。根据输入端子和输出端子个数及其程序容量选用西门子公司(德国)生产S7-200CN系列(CPU226)PLC为主机,PLC气动控制系统的接线图参如图4所示。
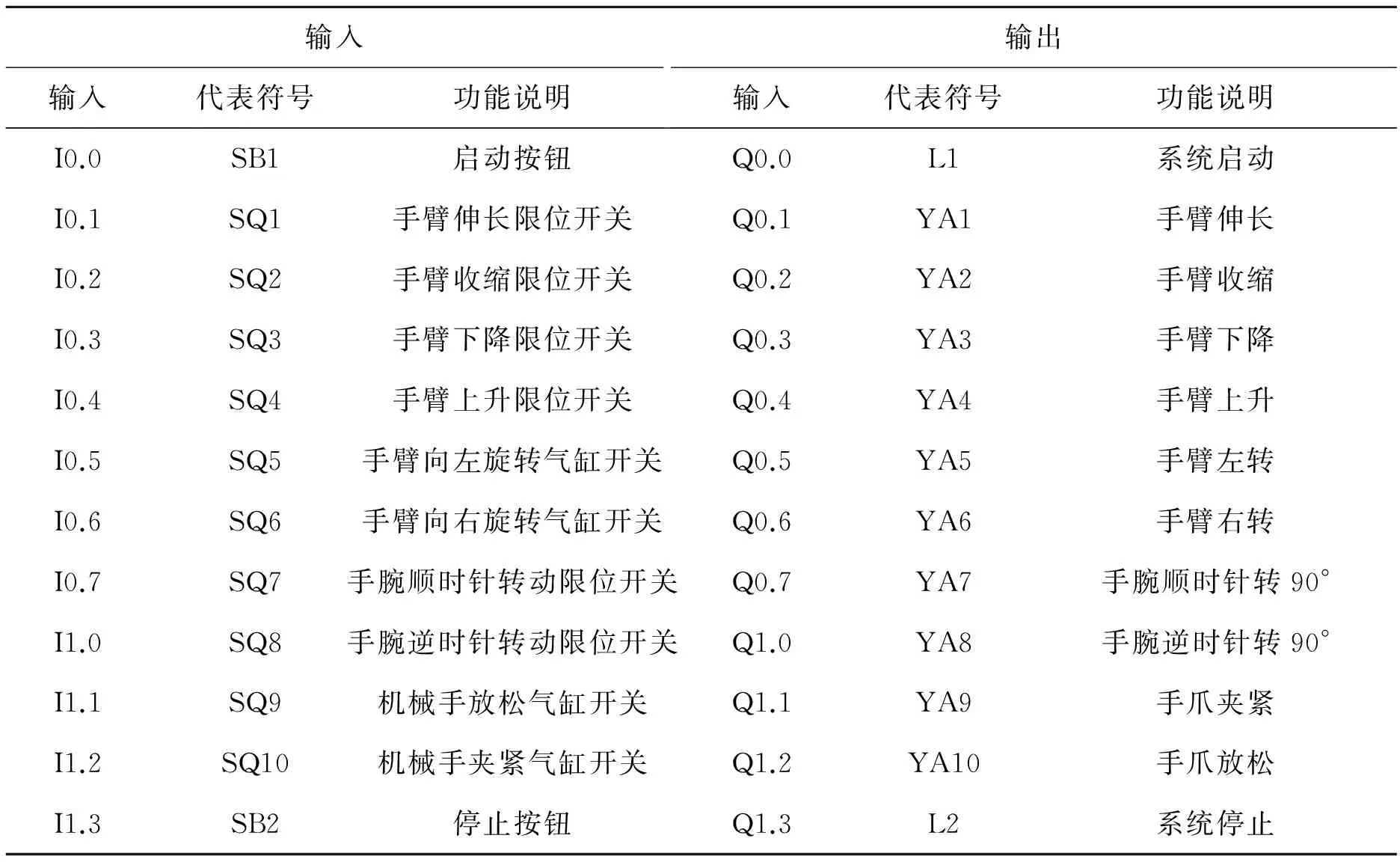
表1 PLC I/O口分配
5 总结
该物料气动搬运机械手具有以下特点:①所设计的机械手应用于物流输送系统;②该机械手可以选择配置普通的“V”字型夹持手指,以抓取5 kg及以下重量的一般工件;③采用气压传动,动作迅速,反应灵敏,能够有效改善工人的工作环境;④气动技术的应用使搬运机械手结构变得更简单、质量轻、动作迅速平稳可靠、节能而不污染环境;⑤气动搬运机械手软件控制方式为PLC控制,其具有程序修改方便、运用灵活等优点,整个过程中对动作时间控制以及动作行程的控制均可通过编写PLC程序来完成。
[1] 李庭贵.气动机械手搬运物料精确定位控制系统设计[J].液压与气动,2012(1):54-56.
[2] 黄伟玲.基于PLC的气动搬运机械手设计[J].煤矿机械,2009,30(10):20-22.
[3] 天津大学《工业机械手设计基础》编写组.工业机械手设计基础[M].天津:天津科学技术出版社,1980:125-127.
[4] 谢丽萍,王占富,岂兴明.PLC快速入门与实践[M].北京:人民邮电出版社,2010:65-66.
[5] 李明.单臂回转式机械手设计[J].制造技术与机床,2005(7):60-62.
[6] 李允文.工业机械手设计[M].北京:机械工业出版社,1996:465-467.
(责任编辑 吴鸿霞)
Design and Application of Pneumatic Conveying Manipulator
ChengJingping,SunYing
(School of Mechanical and Electronic Engineering,Hubei Polytechnic University,Huangshi Hubei 435003)
This paper studies the application of the pneumatic manipulator in the conveying system.According to the requirements,the overall design scheme of pneumatic manipulator was drafted,the key parts were designed and the control system was completed.With four degrees of freedom,the pneumatic manipulator can be applied in the transportation of the bar work pieces on production lines.With pneumatic drive and the high-precise feedback control mode using programmable controller-sensor-gas pneumatic components,pneumatic conveying manipulator was of highly application value in the intelligent material transportation system.
manipulator;pneumatic;PLC;intelligent transportation
2016-06-06
成经平,教授,硕士,研究方向:机械产品创新设计。
10.3969/j.issn.2095-4565.2016.05.001
TP241
A
2095-4565(2016)05-0001-03
