海上并靠补给波浪补偿技术发展趋势
2016-11-21胡永攀
白 玉,胡永攀
(后勤工程学院,重庆 401311)
海上并靠补给波浪补偿技术发展趋势
白 玉,胡永攀
(后勤工程学院,重庆 401311)
并靠补给是一种重要的海上补给方式。舰船在海浪作用下会产生六自由度运动,对海上并靠补给具有重要影响;波浪补偿技术能够消除舰船运动对海上并靠补给的影响,是海上并靠补给的一项关键技术。介绍海上并靠补给及其波浪补偿技术,探讨海上并靠补给对波浪补偿技术的需求,分析被动式波浪补偿技术和主动式波浪补偿技术的发展现状,研究六自由度波浪补偿技术的工作原理。通过分析指出,六自由度波浪补偿系统能够完全补偿两舰船之间的相对运动,不仅可以避免货物与被补给船之间发生碰撞,而且可以精确地将货物补给到指定位置和有效地抑制或消除货物的摆动,是波浪补偿技术的重要发展方向。六自由度波浪补偿技术是通过绳牵引并联机构实现的,技术难度较大。
海上并靠补给;波浪补偿技术;六自由度波浪补偿;绳牵引并联机构
1 海上并靠补给和波浪补偿技术
并靠补给是一种重要的海上补给方式。在海上实施并靠补给时,补给船和被补给船锚泊并靠在一起,通过索链和缓冲垫将两船连接起来,通过船用起重机将货物从补给船吊装到被补给船上。并靠补给在海上集装箱补给和鱼雷导弹装填等任务中发挥着不可替代的作用。
舰船在海浪作用下会产生横荡、纵荡、升沉、横摇、纵摇及艏摇六自由度运动(见图1),对海上并靠补给具有重要影响,主要表现在:① 两舰船在升沉方向上的相对运动可能导致补给中的货物与被补给船甲板碰撞,给海上补给带来巨大的风险;② 两舰船在水平方向上的相对运动会使货物无法准确吊装到指定位置;③ 补给船的六自由度运动会引起货物摆动,在一定情况下,摆动可能非常剧烈并引发严重后果[1]。因此,为保证并靠补给安全、高效地进行,必须采用一定的技术手段补偿舰船运动的影响,这些技术手段统称为波浪补偿技术。
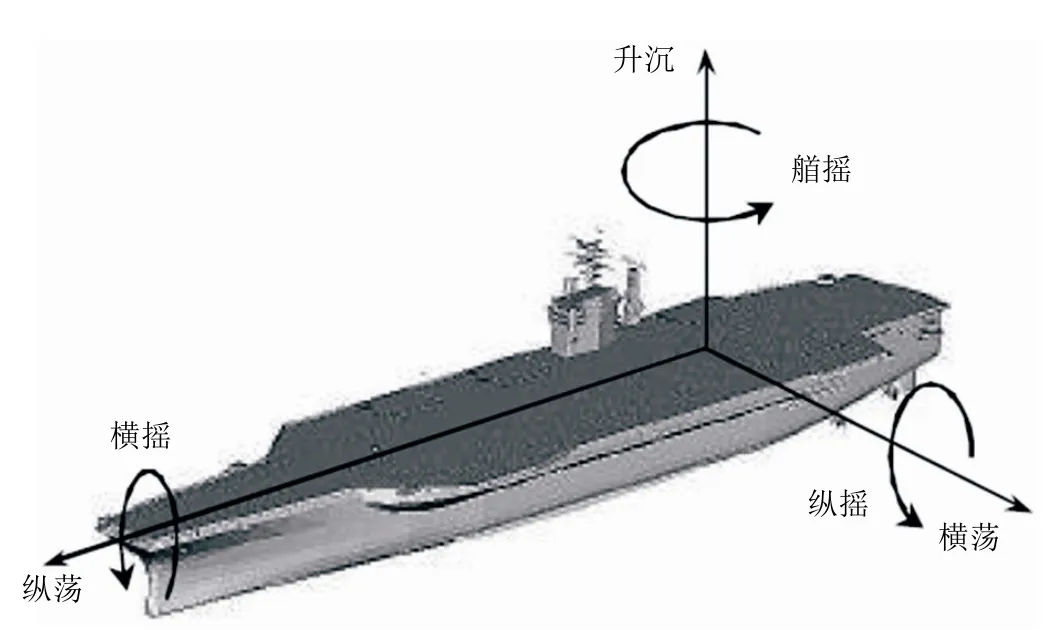
图1 海浪引起的舰船六自由度运动
2 波浪补偿技术发展现状
目前国内外广泛使用的波浪补偿技术可以分为被动式和主动式2种[2]。
2.1 被动式波浪补偿技术
被动式波浪补偿技术无需进行主动控制,工作原理简单,技术难度较小。随动小车补偿系统是一种最常用的被动式波浪补偿系统,其结构原理见图 2。随动吊钩绕过随动小车挂到被补给船的甲板上,当被补给船相对补给船向下运动时,带动随动小车向右运动,高压空气瓶储存能量,货物下放;当被补给船相对补给船向上运动时,随动小车在气缸的作用下向左运动,高压空气瓶释放能量,货物提升,由此实现货物跟随被补给船的甲板上下运动。随动小车补偿系统的主要不足有:① 补偿过程滞后,补偿精度较低;② 被补给船甲板上必须有挂接补偿吊钩的点,且承受力较大;③ 每次吊装时都要先将补偿吊钩挂到被补给船甲板上,然后再取下,操作麻烦。
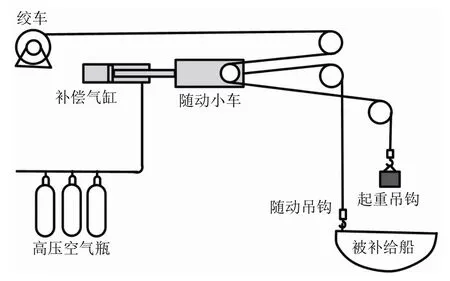
图2 随动小车补偿系统结构原理
2.2 主动式波浪补偿技术
被动式波浪补偿技术在并靠补给中的补偿作用是非常有限的,而主动式波浪补偿技术能够弥补其一些缺陷,具有更广阔的应用前景。主动式波浪补偿系统通过主动控制的方式实现波浪补偿,目前使用的主要有绞车收放式、液压缸伸缩式和吊臂变幅式3种。① 绞车收放式(见图3a)——通过绞车收放绳索实现波浪补偿,是最常见的主动式波浪补偿方式。② 液压缸伸缩式(见图3b)——依靠液压缸和滑轮组实现波浪补偿,当液压缸伸长时,货物上升;当液压缸缩短时,货物下降。这种波浪补偿系统占用的空间较多,但是容易实现模块化,可用来改装传统的船用起重机。③ 吊臂变幅式(见图3c)——通过吊臂的变幅来控制货物的升降,补偿效率低,浪费能量多,目前应用较少。
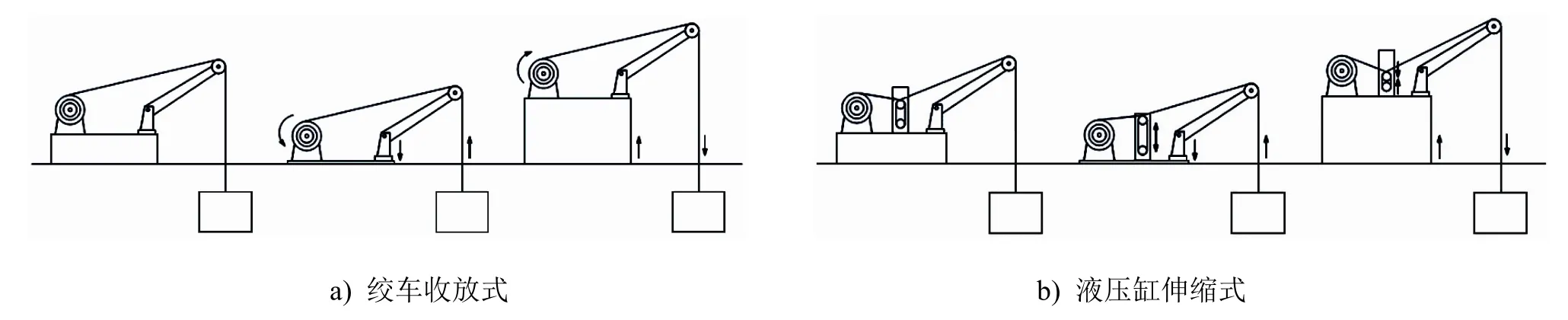

图3 常见的3种主动式波浪补偿方式
3 六自由度波浪补偿技术
为保证海上并靠补给安全、高效、精确地进行,波浪补偿系统必须具备相对运动补偿和摆动抑制2项功能,其中:相对运动补偿功能是指消除两舰船之间的相对运动对并靠补给的影响;摆动抑制功能是指抑制补给船运动引起的货物摆动。现有的波浪补偿系统大多只具备升沉运动补偿的单一功能,不具备六自由度相对运动补偿和摆动抑制功能。
20世纪 80年代,美国标准与技术研究院研制出一种并联起重机器人 RoboCrane,将 6根绳索按照Stewart构型来吊装货物,每根绳索连接一台电机,能够控制货物六自由度的运动。在此基础上,美国海军研究办公室联合Oceaneering和ATR公司研制出LVI LO/LO。该系统采用冗余构型,通过8根绳索控制货物运动,使用惯性测量单元和摄像机阵列来检测舰船之间的相对运动。2010年5月,LVI LO/LO演示样机(见图4)在墨西哥湾完成真实环境试验,在1m浪高的情况下成功补给128个集装箱,验证了设计方案和相关技术的有效性[3]。该系统是目前国际上最先进的六自由度相对运动补偿系统。

图4 LVI LO/LO演示样机
六自由度波浪补偿系统实际上是一种绳牵引的并联机器人,通过收放多根绳索来控制货物的六自由度运动,以保证货物与被补给船之间的相对运动不受两船相对运动的影响,从而实现六自由度波浪补偿。绳牵引并联机构是用绳索代替传统刚性支杆的新型并联机构,一般由基座(或机架)、动平台(也称负载)、绳索、驱动器及连接绳索与基座或动平台的铰链等组成,将驱动器的运动和力以绳索为介质转换为动平台的运动和力。常见的绳牵引并联机构的结构形式有2种(见图5):第1种结构中,所有绳索都分布在动平台的一侧,必须依靠重力才能实现静平衡或动力学平衡,这种结构也称为绳索悬挂并联机构[4];第2种是更为普遍的结构,绳索分布在动平台的四周,不需要重力也可以实现平衡,可以用于太空环境中。六自由度并联波浪补偿系统的绳牵引并联机构采用第1种结构形式。
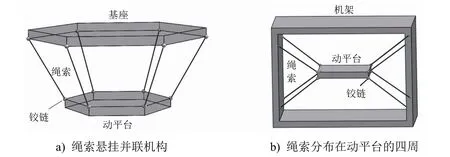
图5 绳牵引并联机构的2种结构形式
绳牵引并联机构的几何模型见图6,定义2个坐标系OB-xByBzB和OP-xPyPzP,分别固定在基座和负载上,称为基座坐标系和负载坐标系。假设绳牵引并联机构包含m根绳索; Pi和 Bi(i=1,…,m)分别为第i根绳索与-负---载-→和基座-的---连-→接点; pi和 bi分别为从负载和基座坐---标-→系的原点指向相应的绳索连接点的矢量,即为第i根绳索对应的矢量,ei为li的单位矢量。
用xPB表示负载坐标系相对于基座坐标系的位置,由图6可知

将式(1)在基座坐标系中表示出来,可得

式(2)中:B和P分别表示该矢量的参考坐标系是基座坐标系和负载坐标系;为负载坐标系到基座坐标系的方向余弦矩阵。

式(3)中:Ψ,θ和φ为负载坐标系相对于基座坐标系的3个欧拉角,分别为艏摇角、纵摇角和横摇角[5]。

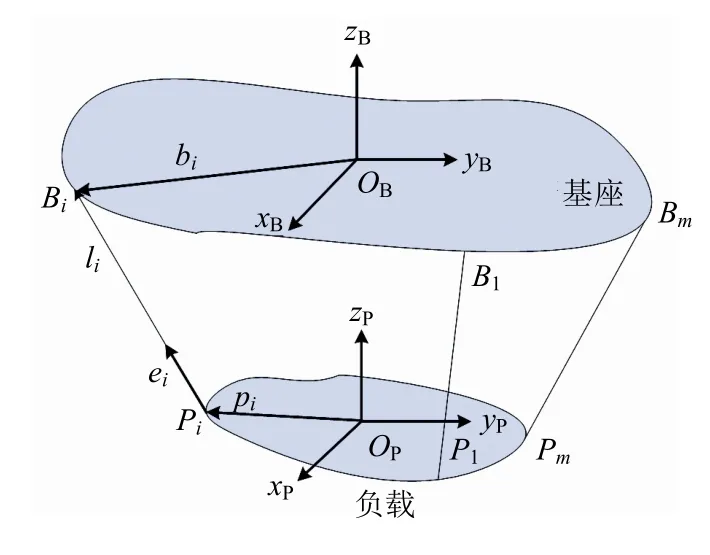
图6 绳牵引并联机构几何模型
在并靠补给过程中,只要给定负载相对于被补给船的期望位姿,并测量出被补给船相对基座的位姿,就可以根据式(4)计算出波浪补偿需要的绳索长度。通过实时控制各绳索的收放使其长度与计算值相等,就能够保证荷载与被补给船的相对位姿与预先设定的期望值一致,而与两船的相对运动无关。因此,六自由度波浪补偿系统能够完全补偿两舰船的相对运动对海上并靠补给的影响。
随着海洋开发和海军建设的发展,海上并靠补给任务越来越复杂,对波浪补偿技术的要求也越来越高。目前海上并靠补给主要用来补给食品、零件等干货,配套的波浪补偿系统仅须消减货物与被补给船甲板的碰撞,因此单自由度的波浪补偿技术(主要为升沉补偿)一般就能满足要求。随着我国海军逐步走向远海,为满足远洋作战的需求,舰船不仅需要在海上补给干货,还需要进行集装箱堆垛和鱼雷导弹装填,这些新的补给任务要求补给过程中货物相对于被补给船的姿态和运动都不受舰船相对运动的影响,只能通过六自由度波浪补偿技术来实现。因此,六自由度波浪补偿技术是海洋开发和海军建设深入开展的迫切需求,代表波浪补偿技术的发展方向。
4 结 语
六自由度波浪补偿系统能够完全补偿两舰船之间的相对运动,不仅可以避免货物与被补给船之间发生碰撞,而且可以精确地将货物补给到指定位置。同时,多根绳索空间悬挂结构本身具有较强的抗摆能力,能够有效地抑制或消除货物的摆动,避免摆动带来的风险。因此,六自由度波浪补偿技术能够满足海上并靠补给对波浪补偿技术的要求,是波浪补偿技术的发展趋势。六自由度波浪补偿是通过绳牵引并联机构实现的,技术难度较大。
[1] 陆卫杰. 舰艇并靠导弹补给及波浪补偿系统研究[D]. 南京:南京理工大学,2006.
[2] 徐小军,陈循,尚建忠. 一种新型主动式波浪补偿系统的原理及数学建模[J]. 国防科技大学学报,2007, 29 (3): 118-122.
[3] 胡永攀,陶利民,吕伟,等. 并联波浪补偿系统的鲁棒控制方法[J]. 国防科技大学学报,2014, 36 (6): 171-179.
[4] ALP A B, AGRAWAL S K. Cable suspended robots: design, planning and control[C]//Proceedings of the 2002 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2002: 4275-4280.
[5] SHUSTER M D. A survey of attitude representations[J]. The Journal of the Astronautical Sciences, 1993, 41 (4): 439-517.
Discussion on the Development Trends of Wave Compensation Technology of Offshore Alongside Replenishment
BAI Yu, HU Yong-pan
(Logistical Engineering University of PLA, Chongqing 401311, China)
Side-by-side transfer is an important replenishment method at sea. Wave-induced 6-DOF ship motions have large influences on the offshore replenishment operation whereas wave compensation technology can eliminate the influences of wave-induced ship motions, so it is a key technology for offshore replenishment. This paper introduces the offshore replenishment and its wave compensation technology, discusses technological requirements of wave compensation in offshore replenishment, analyzes the development of both active and passive wave compensation technology, and studies the principle of 6-DOF wave compensation system. Then it points out that 6-DOF wave compensation system can completely compensate the relative motions of the two ships, which not only prevents the collision between cargo and ship, but also accurately positions the cargo to the designated location and effectively depresses the pendulum motion of the cargo. Therefore it is a significant advancement of wave compensation technology. The 6-DOF wave compensation technology is based on cable-driven parallel mechanism, which is technically difficult.
offshore alongside replenishment; wave compensation technology; 6-DOF wave compensation; cable-driven parallel mechanism
U664.82
A
2095-4069 (2016) 05-0001-04
10.14056/j.cnki.naoe.2016.05.001
2015-10-16
白玉,男,硕士,1973年生。毕业于昆明理工大学,现为后勤工程学院教师。
