基于抵消周期设计的干树半潜式平台水动力性能研究
2016-11-18黄维平孙远坤
梁 宁, 黄维平, 周 阳, 常 爽, 孙远坤
(1.中国海洋大学, 山东 青岛 266100; 2.国家海洋局第二海洋研究所, 杭州 310012)
基于抵消周期设计的干树半潜式平台水动力性能研究
梁 宁1, 黄维平1, 周 阳2, 常 爽1, 孙远坤1
(1.中国海洋大学, 山东 青岛 266100; 2.国家海洋局第二海洋研究所, 杭州 310012)
基于抵消周期设计了干树半潜式平台,并对其水动力性能进行了研究。深吃水式干树半潜式平台不采用垂荡板等附属结构,将干式开发系统和半潜式平台的优点相结合。通过对结构主尺度的优化来降低平台的垂荡响应,使其能够支持干采油树系统。采用三维势流理论,运用SESAM软件对干树半潜式平台进行了水动力性能分析。运用HydroD模块对平台进行频域分析,得到平台附加质量、势流阻尼、幅值响应函数等参数。运用DeepC模块对平台进行时域耦合分析,得到平台加系泊系统后的时域响应。
干树半潜式平台;水动力性能;结构设计
0 引言
目前,在深海油气资源开发中,采用干采油树的浮式平台主要有张力腿平台(TLP)和单柱式平台(SPAR)[1,2]。在水深超过1 500 m后,张力腿平台张力筋腱的设计将面临极大的挑战,其造价也将大幅度增加,进而造成整体开发方案的经济性降低。并且张力腿平台需要海上施工组装,因此海上施工成本和风险性是张力腿平台的另一个制约点。单柱式平台能够支撑的甲板面积有限,其超长的立柱决定了它必须要经过拖航后主船体的扶正和上部组块的海上组装[3,4]。与上述两种平台相比,干树半潜式平台能够提供更大的甲板面积、支撑更大的上部荷载,能够实现上部组块的码头安装进而整体拖航。因此干树半潜式平台成为深海油气资源开发方案中的一个新的选择[5]。
半潜式平台作为一种典型的深海浮式平台已经历过七代共四十余年的发展历程[6]。它具有甲板可变载荷更大、上部组块码头安装、平台整体拖航无需海上施工等优点[7]。干采油树位于平台井口甲板上,通过张紧器与顶张式立管相连接,具有便于控制、作业维护费用低、生产效率高等特点。传统半潜式平台垂荡固有周期与极端海况的波浪周期接近,导致平台垂荡运动较大,无法支持干采油树。干树半潜式平台通过增加吃水、结构优化等方式改善平台垂荡运动性能,使其可以将半潜式平台和干采油树的优点结合起来。
1 干树半潜式平台设计
1.1 抵消周期
通过对主尺度的选取,可以在垂向荷载的抵消周期中降低平台的垂向运动响应。当作用在穿越水面立柱上的Froude-Krylov力和作用在全浸没浮箱上的绕射力相等时,平台所受的垂向荷载抵消进而造成平台垂向运动最小[8]。
垂向向上的Froude-Krylov力在波浪峰值处的大小可以近似估算为:
(1)
式中:A为立柱水线面面积;D为吃水深度(取正值);H为波高;T为波浪周期。
垂向向下的浮箱绕射力在波浪峰值处的大小可以近似估算为:
(2)
式中:V为浮箱排水体积;z为浮箱重心高度(取负值);CM为附加质量系数。
对于确定的波高,作用在立柱上的垂向Froude-Krylov力随着波浪周期的提高而增大。与它作用方向相反的浮箱的绕射力随着波浪周期的提高呈现先增大后减小的趋势[8]。通过改变干树半潜式平台的水线面面积与浮箱排水体积比,可以选定使抵消周期发生在某个特定周期。对于生产平台来讲,由于极端环境条件下立管系统还是与平台主体保持连接,因此抵消周期的选择应当偏向于极端环境条件下尽可能地减小立管冲程。对于该文的干树半潜式平台,针对南海百年一遇极端环境条件下的谱峰周期为16.1 s。由于平台是对称结构,通过改变单一立柱水线面面积和浮箱排水体积比即可选定平台抵消周期。最终选定结构抵消周期为21 s,即图1中两条曲线交点的横坐标值。

图1 选定平台的抵消周期

图2 干树半潜式平台示意图
1.2 干树半潜式平台构造
该文的干树半潜式平台具有深吃水的特点,从而减小了浮箱上的波浪激励力[9]。平台由上部组块、主船体、系泊系统、立管系统组成,如图2所示。其主船体包括四个方形立柱和四个矩形浮箱,采用16缆张紧式系泊。在立柱选取上需要考虑截面形式、水线面面积、立柱间距等因素。方形截面具有便于和浮箱连接、建造方便等优势,且通过对方形立柱截面倒角的方式使其能够达到圆形立柱截面的水动力性能。增加立柱水线面可以增加恢复力矩,进而改善平台稳性。但过大的水线面面积会降低平台垂荡运动固有周期和抵消周期,不利于改善平台的垂荡运动性能。增大立柱间距会使浮箱与立柱排水比增大,这会直接提高平台的抵消周期,但过大的立柱间距会对甲板设计造成极大的挑战。浮箱主要提供平台的压载,降低平台重心,增大浮箱体积会提高平台抵消周期[10]。
1.3 干树半潜式平台尺寸
平台主尺度在满足半潜式平台要求的前提下,基于平台的抵消周期对干树半潜式平台主尺度进行设计、调整。当作用在浮箱上的波浪力同立柱上的波浪力相等时,平台的垂荡运动最小。在百年一遇极端环境条件下,平台的抵消周期与波浪周期接近,此时,可以使平台在极端环境条件下垂荡运动幅值较小进而保护顶张式立管系统不被破坏[8,11]。综合考虑浮箱与立柱排水比、总排水量、上部甲板等因素,选定平台的主要参数见表1。

表1 干树半潜式平台主要参数
2 计算理论
2.1 三维势流理论
在SESAM中采用三维势流理论计算结构物湿表面上的波浪力。势流理论假定流体为理想流体,即假设流体具有均匀、无粘性、无旋、不可压缩的特性。速度势满足拉普拉斯方程和海底条件、自由表面条件、物体湿表面条件和辐射条件。根据拉普拉斯方程以及边界条件可以唯一的确定出速度势,然后由伯努利方程计算出物体湿表面上的压力,再通过对物体表面进行压力积分就可求出物体所受到的波浪载荷[12,13]。
流场中的总速度势包含入射势φI,绕射势φD和辐射势φR,则总速度势函数为:
(3)
无限水深条件的入射势为:
(4)
式中:g为重力加速度;A为入射波振幅;ω为入射波频率;k为入射波波数;α为入射波方向。
2.2 频域运动控制方程
平台在整体坐标系中考虑所受的波浪激励以及附加质量、阻尼等作用的运动方程为[14]:
(5)
式中:M为质量和惯量矩阵;A(ω)为结构的附加质量矩阵;B(ω)p为频域下的势流阻尼矩阵;Bv为频域下的线性化后的粘性阻尼矩阵;C为静水回复力矩阵;Ce为外部回复力矩阵;F(ω,β)为外部激励力矩阵。
2.3 时域运动控制方程
海洋结构物在实际的海洋环境中会受到波浪载荷、风载荷和海流载荷的联合作用,故需要较全面的将各因素纳入考虑范围。考虑风、浪、流,以及系泊系统作用的平台运动时域方程可表达为:
(6)
式中:Fwa(1)(t)为一阶波浪载荷;Fwa(2)(t)为二阶波浪载荷;Fwi(t)为风载荷;Fcu(t)为流载荷;Fmo(t)为系泊系统对平台的作用力;mij为平台的质量矩阵;uij为附加质量矩阵;Cij为恢复力系数矩阵;Lij(t-τ)为平台系统的延迟函数。
平台在非线性波浪作用下的瞬时波浪力可以写为:
(7)

(8)
(9)

(10)
(11)


图3 干树半潜式平台模型
3 频域水动力分析
设定干树半潜式平台的服役海域为中国南海,工作水深1 500 m。频域分析时取规则波波浪周期为5 s~50 s,间隔1 s。波浪入射方向从0°~90°,间隔15°。利用HydroD中的Wadam求解干树半潜式平台的频域响应。对于在海洋环境中的浮体,运动时其所受到的阻尼包含浮体的辐射阻尼、慢漂阻尼、粘性阻尼等。在实际中难以对上述惩罚逐一进行准确计算,因此在工程应用中采用经验系数的方式对阻尼进行估算[15]。在干树半潜式平台的计算中,横摇、纵摇线性阻尼系数取临界阻尼的3%,垂荡线性阻尼系数取临界阻尼的5%。
3.1 平台模型的建立
根据干树半潜式平台的主尺度,运用SESAM软件中的GeniE模块建立干树半潜式平台的湿表面模型,并将其导入到HydroD模块建立水动力频域计算所用的模型,如图3所示。
3.2 附加质量和势流阻尼
平台的附加质量和势流阻尼都是矩阵形式,取六个主对角线上的数值研究其变化规律。图4、图5分别给出了附加质量和势流阻尼随波浪周期的变化规律。总体来看,结构转动的附加质量和势流阻尼都远大于平动的附加质量和势流阻尼。纵荡和横荡附加质量随着波浪周期先急剧增大后减小,再增大后减小,最终趋于稳定。另外四个自由度的附加质量先减小后增大,而后减小并最终趋于稳定。纵荡和横荡的势流阻尼随着波浪周期增加先有一个大波峰,再有一个小波峰最终趋于零。垂荡、横摇、纵摇的势流阻尼先有一个小波峰再有一个大波峰,最终进而趋于零,艏摇在短周期内有一个波峰后迅速减小为零。
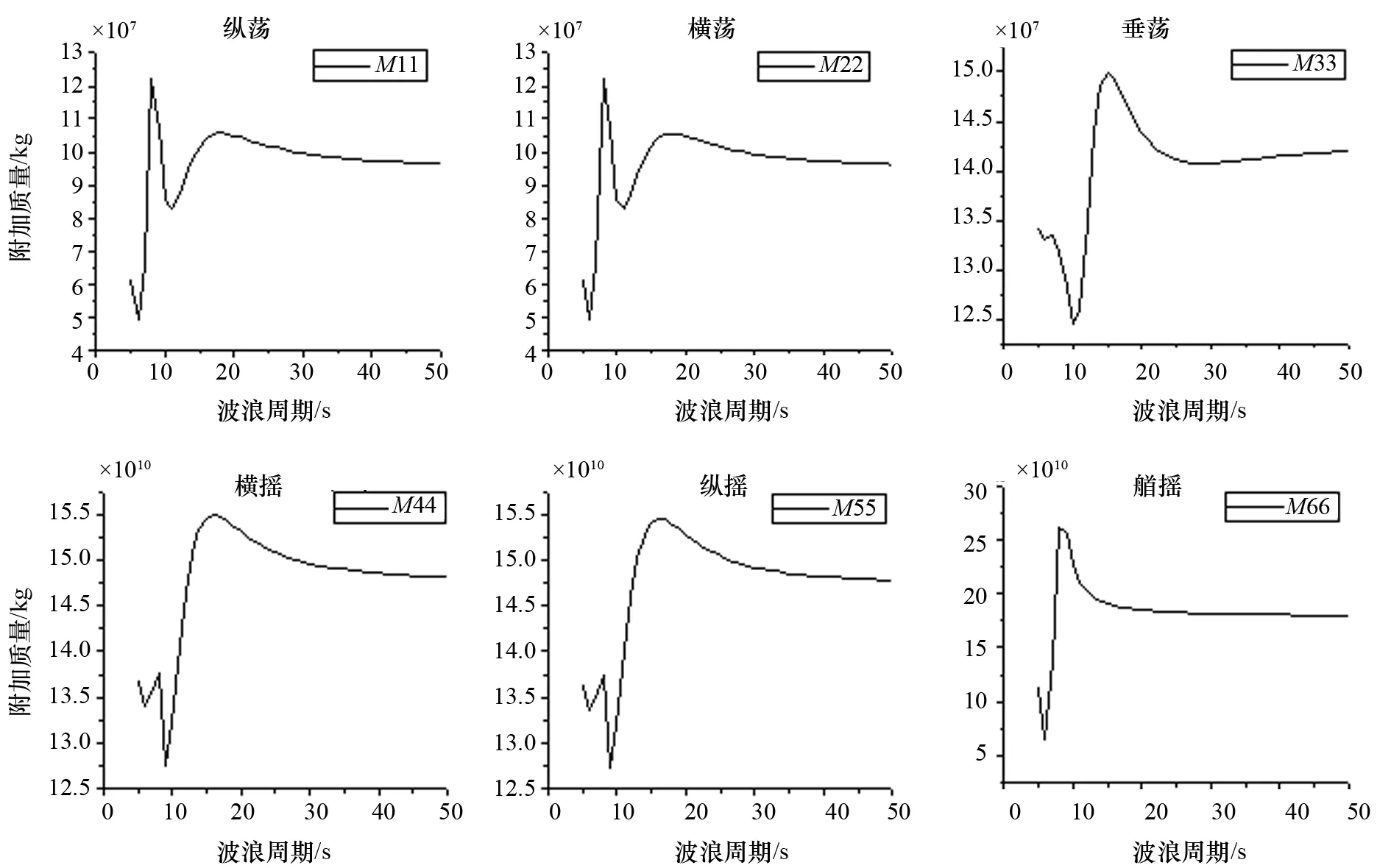
图4 平台附加质量
3.3 幅值响应函数
平台在6个自由度的运动可分为平面内运动(纵荡、横荡、艏摇)和平面外运动(横摇、纵摇、垂荡)。图6~图11分别给出了干树半潜式平台在6个自由度的运动响应幅值算子(RAO)。结果表明,平台垂荡运动抵消周期为21 s,固有周期为24 s。平台抵消周期在百年一遇极端环境条件谱峰高能量区域末端,在抵消周期处平台垂荡运动响应最小。结构垂荡运动固有周期避开主要波浪周期;平台横摇、纵摇固有周期在32 s左右,其峰值也成功避开了主要波浪周期。由于频域分析时没有添加系泊系统,因此纵荡、横荡两个方向上没有回复力,平台运动随波浪周期增大而变大。结构艏摇在波浪周期8s时有峰值,随着波浪周期增大艏摇运动逐渐减小。
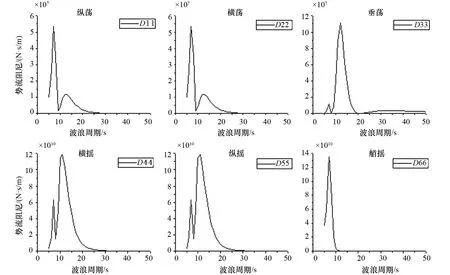
图5 平台势流阻尼

图6 平台纵荡RAO

图7 平台横荡RAO
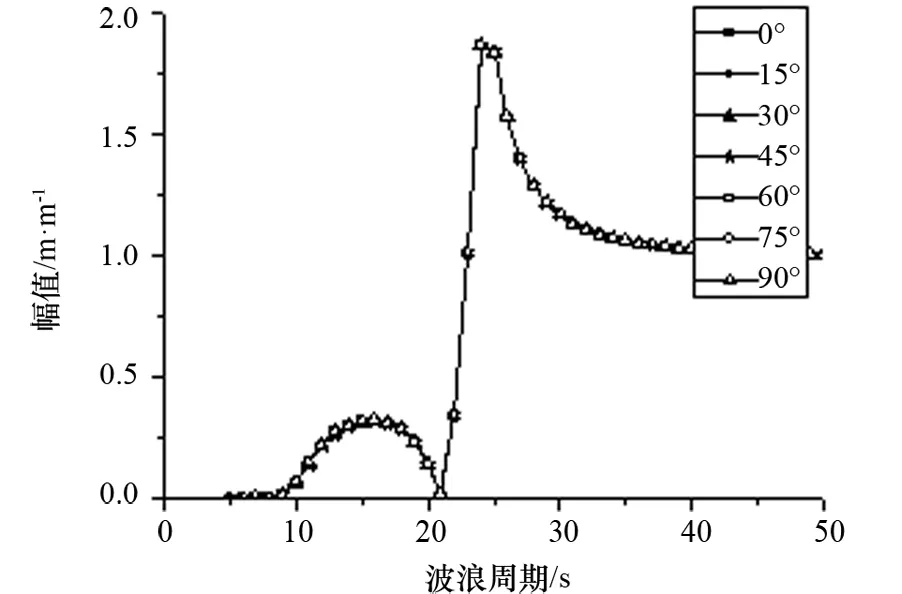
图8 平台垂荡RAO

图9 平台横摇RAO

图10 平台纵摇RAO

图11 平台艏摇RAO
4 时域水动力分析
4.1 系泊系统特性和环境条件
干树半潜式平台采用张紧式系泊,该系泊系统由16根系泊缆组成,分为4组对称布置。第一象限内系泊缆与X轴的夹角分别为30°、40°、50°、60°,系泊缆与海底夹角为40°。每根系泊缆由锚链、尼龙缆、锚链三段组合而成,系泊缆一端与海底锚基相连另一端通过导缆器与张紧器相连。系泊缆参数见表2,根据南海海域海况,选取百年一遇环境条件,见表3。时域分析中保守考虑,设定风、浪、流是同向的。

表2 系泊缆属性

表3 百年一遇环境条件
4.2 平台时域响应
图12~图15依次给出了干树半潜式平台在时域分析中纵荡、垂荡、横摇和艏摇方向上的响应。可以看出,平台纵荡最大值为27.2 m,垂荡最大幅值为3.7 m,横摇运动最大角度为3.3°,艏摇运动最大角度为6.8°。干树半潜式平台的核心控制项为垂荡运动,若垂荡运动幅值过大,则平台无法支持顶张式立管,进而不能采用干采油树系统。计算得到的最大垂荡响应幅值为3.7 m,在顶张式立管张紧器的行程范围内,因此可以使用顶张式立管。

图12 纵荡响应

图13 垂荡响应

图14 横摇响应

图15 艏摇响应
图16给出了干树半潜平台垂荡运动的频谱分析结果。可以看出,平台的垂荡运动在南海百年一遇环境条件下有两个峰值,第一个频率较低的峰值在0.26 rad/s,换算周期为24 s,即为平台垂荡运动的固有周期,与频域分析结果一致。第二个频率较高的峰值在0.39 rad/s,换算周期为16 s,即为南海百年一遇环境条件下波浪的谱峰周期。在百年一遇环境条件下,波浪谱能量范围内造成了较大的平台垂荡运动,并且激发了平台在固有周期的运动。图17给出了平台系泊缆中受到最大张力的12号系泊缆的张力时程曲线,可以得到在百年一遇极端环境条件下,平台系泊缆(尼龙缆部分)受到的最大张力为8 120 kN,安全系数为1.97。系泊缆的安全系数满足API-RP-2SM对尼龙缆完整状态下最小安全系数为1.84的要求[16]。
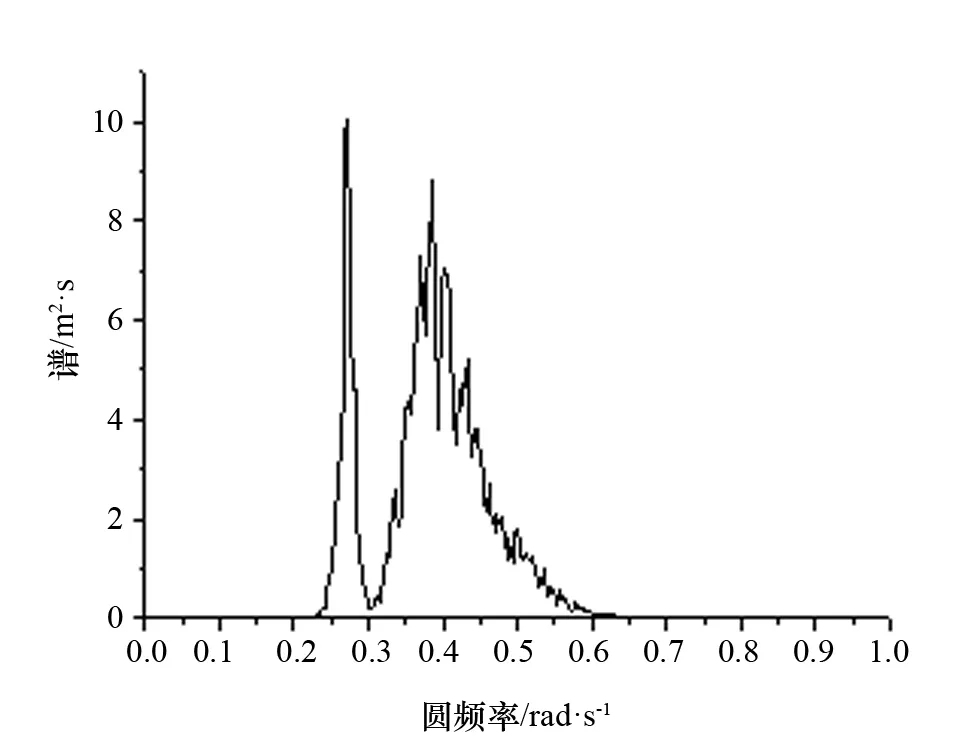
图17 12号缆绳张力结果

图16 平台垂荡频谱结果
5 结语
针对抵消周期和设计要求进行干树半潜式平台的主尺度选型。在选定合理的吃水、立柱、浮箱等参数后平台能够满足干采油树生产时对垂荡性能的要求。在频域分析中只针对平台主体进行水动力分析,得到了平台六个自由度上的附加质量、势流阻尼和RAO,初步验证干树半潜式平台的运动性能。针对平台进行了系泊系统设计,在时域分析中计算平台和系泊缆的耦合运动响应。从时域结果中可以验证平台具有良好的水动力性能,其核心控制项垂荡运动满足顶张式立管的要求,系泊系统满足规范要求。干树半潜式平台的提出及分析计算,对我国开发深水油气资源提供了一定的参考意义。
[1] 董艳秋. 深海采油平台波浪载荷及响应[M].天津:天津大学出版社,2005.
[2] Zhang D G, Chen Y J and Zhang T Y. Floating production platforms and their applications in the development of oil and gas fields in the south china sea[J]. Journal of Marine Science and Application, 2014, 13: 67-75.
[3] 罗勇, 高巍, 申辉, 等. 新型深水干树半潜平台选型及总体性能分析研究[J]. 中国造船(增刊), 2013(A02):30-40.
[4] Williams N, Leverette S, Bian S, et al. FourstarTM Dry-Tree Semisubmersible Development[C]. OMAE Conference, 2010.
[5] 王桂林, 段梦兰, 王莹莹,等. 干式井口半潜式生产平台技术与应用[J]. 中国海洋平台, 2010, 25(5):11-14.
[6] 刘海霞. 深海半潜式钻井平台的发展[J]. 船舶, 2007, 6(3) : 6-10.
[7] 姜哲, 谢彬, 谢文会. 新型深水半潜式生产平台发展综述[J]. 海洋工程, 2011, 29(3): 132-138.
[8] N.D.P. Barltrop. Floating Structures: a guide for design and analysis[M]. Houston: Oilfield Publications, 1998.
[9] Phillip A, Hugh B, Jun C, et al. A Deep Draft Semisubmersible with a Retractible Heave Plate[C]. Proceedings Offshore Technology Conference, Houston, 2002.
[10] John M, Arcandra T, Chan K Y. Hydrodynamics of Dry Tree Semisubmersibles[C]. ISOPE,Lisbon Portugal, 2007.
[11] API-RP-2SK. Recommended practice for design and analysis of station keeping systems for floating structures[S].2005.
[12] DNV.Wave Analaysis by Diffraction and Morison Theory[M]. 2008.
[13] 吴澜, 吴宝山, 匡晓峰, 等. 基于AQWA的半潜式平台水动力特性研究[J]. 中国海洋平台, 2014, 29(5): 29-33.
[14] DNV.SESAM User Manual HydroD Version 4.0[M]. 2008.
[15] 桂龙, 唐友刚, 秦尧, 等. 浅水FPSO限位作业系泊分析[J]. 海洋工程, 2014, 32(3): 28-35.
[16] API-RP-2SM.Recommended Practice for Design, Manufacture, Installation and Maintenance of Synthetic Fiber Ropes for Offshore Mooring[S]. 2001.
Dry-tree Semi-submersible Platform′s Hydrodynamic Performance Research Based on the Design of Cancellation Period
LIANG Ning1, HUANG Wei-ping1, ZHOU Yang2, CHANG Shuang1, SUN Yuan-kun1
(1. Ocean University of China, Shandong Qingdao 266100, China;2.The Second Institute of Oceanography, SOA, Hangzhou 310012, China.)
Based on the cancellation period, design the dry-tree semi-submersible platform and do research on its hydrodynamic performance. Deep draft dry-tree semi-submersible platform don't use accessory structure such as heave plate, it combining the advantages of dry-tree development system with semi-submersible platform. By optimizing the structure's principal dimensions to reduce the heave response so it can adopt the dry-tree system. Based on the three-dimensional potential flow theory, we used the theoretical analysis with numerical calculation to research the dynamic characteristics of the dry-tree semi-submersible by SESAM. The platform's added mass, potential damping, response amplitude operator and other parameters are calculated in frequency domain analysis by HydroD. Time domain coupling analysis was carried out on the platform by DeepC to get platform with mooring system's time domain response.
dry-tree semi-submersible platform; hydrodynamic performance; structural design
2015-12-14
国家自然科学基金(51239008,51179179)。
梁 宁(1990-),男,硕士研究生。
1001-4500(2016)05-0084-09
P751
A
