激光光栅和反射镜姿态调节的高精度开环控制
2016-11-17许树业章亚男陆林海钱晋武
许树业,章亚男,陆林海,钱晋武
(上海大学 机电工程与自动化学院,上海 200072)
激光光栅和反射镜姿态调节的高精度开环控制
许树业,章亚男,陆林海,钱晋武
(上海大学 机电工程与自动化学院,上海 200072)
为了提高功率激光物理实验中激光束的精密对准度,提出了一种对激光光栅和反射镜姿态进行可视化、高精度调节的开环控制系统;该系统设计为由上位机、下位机和角位移微调机构等部分组成;从应用层通信协议、HostLink(Fins)协议和三维姿态模拟等方面介绍了上位机监控软件的设计;从步进电机驱动器复用、PLC电机断电相位记忆和下位机梯形图程序框图等方面讨论了下位机PLC控制系统设计;分析了角位移微调机构中通过把丝杆螺母的直线微位移转换为角度微位移来达到高精度转角分辨率的实现原理;并用实验数据验证了实际转角分辨率达到高精度设计要求;结果表明这种开环控制系统能够很好的实现对激光光栅和反射镜转角的高精度调节控制,对其他类似实验设备的高精度角度调整也具有借鉴意义。
光栅;反射镜;姿态自动调节;开环控制;角位移微调
0 引言
压缩器是高功率激光物理实验装置的重要组成部分[1],它由真空环境中4块光栅和1块反射镜组成。对压缩器光栅和反射镜的姿态进行高精度大范围调节有助于激光束的精密对准,这是研制激光发射系统的关键技术问题之一[2]。关于光栅或反射镜姿态调节的文献公开发表的不多,文献[3]仅从机构设计的角度讨论了对反射镜姿态的调整。本文介绍了对激光光栅和反射镜姿态进行高精度开环控制的设计实现过程。
实际的应用提出的设计目标为:1)4块光栅为串联驱动,反射镜的两维调节为串联驱动;2)每维调节可以选择点动、定长和连续模式3种驱动方式之一;3)零位设置和当前位置的显示;4)消除电机断电、上电前后由于电机相位引入的“抖动”影响;5)每一维的操作按“进度条”显示;6)光栅和反射镜三维姿态模拟;7)光栅和反射镜的各维角度调节控制分辨率和范围等精度要求见表1和表2。
1 系统总体控制方案
系统设计为上位机监控软件、下位机PLC控制系统、角位移微调机构等3个部分组成的高精度开环控制系统,开环控制框图如图1。

表1 光栅三维角度姿态调节分辨率和范围
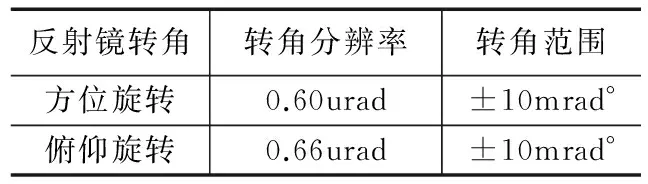
表2 反射镜两维角度姿态调节分辨率和范围

图1 开环控制框图
上位机监控软件通过RS232通信口监控下位机PLC控制系统,下位机PLC控制系统采用欧姆龙的整体式结构小型PLC系统CP1H,其内嵌有4轴高速脉冲输出功能[4],这4路脉冲分别连接到4个步进电机驱动器去控制步进电机的运转,从而驱动角位移微调机构,形成开环系统来调节光栅和反射镜的姿态。
角位移微调机构中,先通过谐波减速器的减速来增加输出扭矩,让步进电机不失步,保证步进电机转角分辨率的精度。然后通过正弦机构把螺母的直线微位移转换为角度的微位移来实现光栅/反射镜高精度转角分辨率的调整要求[5-7]。
2 上位机监控软件设计
上位机监控软件基于Win7系统,采用VB6.0+OpenGL来开发。通过人机界面给实验操作人员提供系统参数设定、光栅切换、当前光栅三维运动控制模式的切换、反射镜二维运动的切换、各维运动启动/停止和进度条显示、虚拟光栅和虚拟反射镜的可视化显示以及报警信息显示等监控功能。
2.1 应用层通信协议
上位机软件监控功能的实现,核心在于上下位机之间如何通信来交换状态和控制信息。应用层通信协议就是对下位机PLC的I/O存储区中哪些区域作为什么样的状态和控制信息进行约定。上位机通过HostLink(FINS)协议对这些约定的I/O存储区进行读取和设置,从而实现上位机和下位机的数据通信。如CIO区域的位地址10.00代表光栅切换按钮,保持继电器区的通道地址H0记录的是当前光栅的编号。如果上位机对10.00先置位后复位,下位机CP1H的梯形图程序将感受到来自10.00位的脉冲,从而实现当前光栅的切换,把当前光栅的编号保存到H0通道。
2.2 HostLink(Fins)协议
上位计算机使用HostLink协议实现与下位机PLC的串行通信[8]。欧姆龙公司早期推出的CPM1A、CPM2A、CQM1和C200Hα等机型,它们最高的地址位只有4位, 所以上位机可以应用HostLink协议对这些型号PLC的内存区所有的数据进行读写。
CP1H作为新近推出的机型,内存区的最高地址位达到5位,超出HostLink协议内存区的地址范围,这种情况下,需要通过HostLink(FINS)协议来通信[9]。FINS协议作为一种命令/响应系统,可以读写PLC节点数据区的内容,甚至控制其运行[10-11]。在HostLink(FINS)协议中,上位机节点发送读写CP1H 特定I/O存储区的FINS命令,嵌入到HostLink的头代码、校验码及结束码之间,发送到PLC,再从PLC回复响应帧,从而实现应用层通信协议。
VB6.0的MSComm[12]通讯控件封装了RS232串口通信物理层bit流的传输功能。内嵌有FINS命令/响应的HostLink帧得发送和接收通过MSComm控件的调用来实现。
2.3 虚拟光栅和虚拟反射镜三维姿态模拟
上位机中虚拟光栅和虚拟反射镜的三维姿态模拟基于OpenGL来实现。OpenGL实际上是一个独立于窗口系统和操作系统的开放式三维图形标准,提供了丰富的绘图命令,并得到了众多计算机厂商的支持。 在VB6.0环境下,使用免费的第三方函数库VBOpenGL type library(Vbogl.tlb类型库)[13-14],它封装了大量的底层OpenGL库函数。根据通讯模块从下位机实时获取的当前光栅的方位、俯仰和面内旋转3个维度的当前位置显示虚拟的三维光栅,依据反射镜方位和俯仰旋转的当前角度显示虚拟的三维反射镜。
上位机监控软件实际运行的界面如图2。
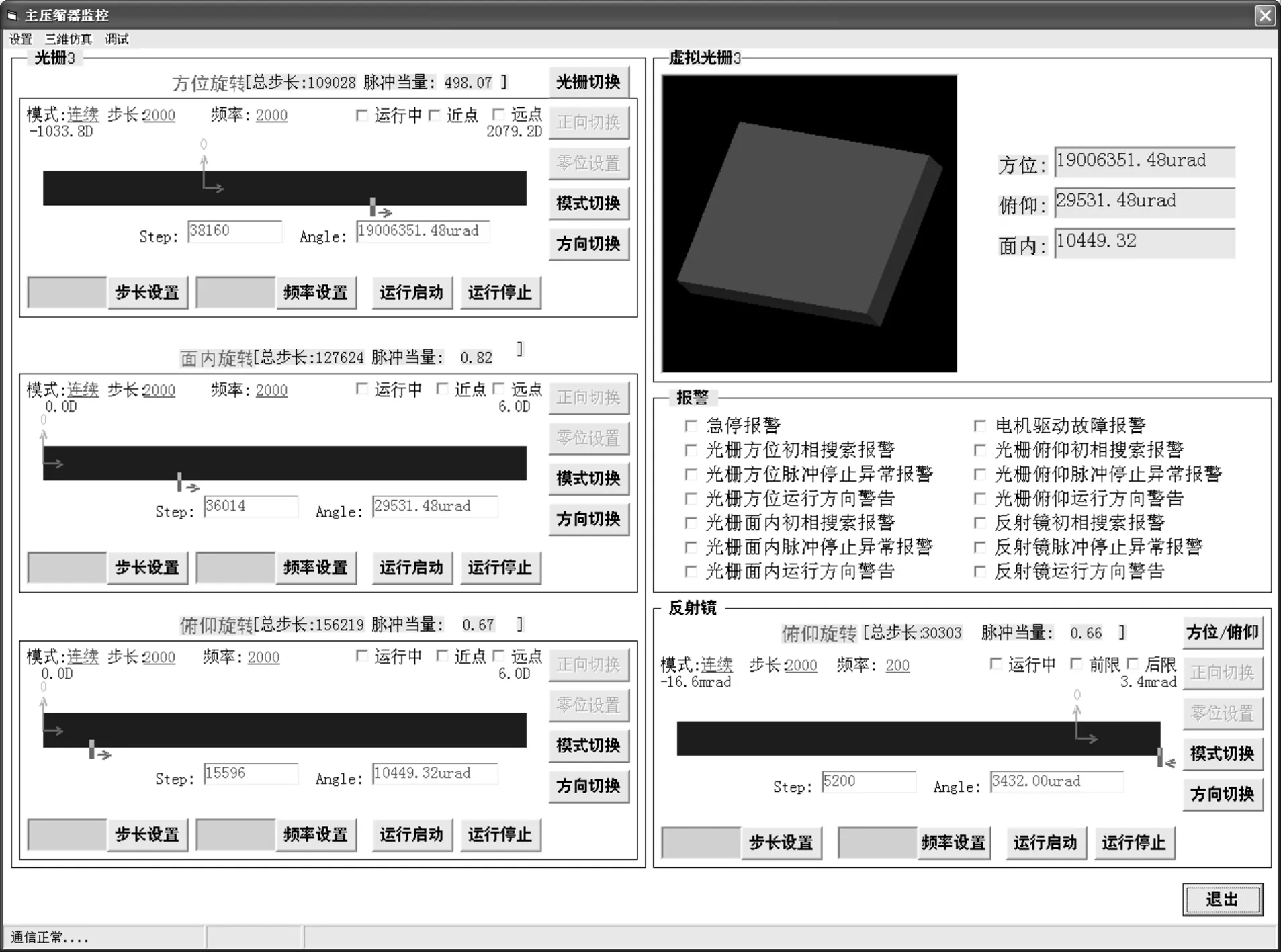
图2 上位机监控界面
3 下位机PLC控制系统设计
下位机PLC控制系统需要采集光栅/反射镜各维角度调整的极限位置信号,接受上位机的监控指令,通过步进电机驱动器对步进电机进行开环控制,从而驱动角位移微调机械机构对光栅和反射镜进行姿态调整。
3.1 步进电机驱动器复用
设计目标提出4块光栅为串联驱动,所以每个时刻,只有一个光栅需要调整,可以通过继电器的通断实现当前光栅的切换,让U1、U2、U3驱动器分别连接到当前光栅的方位、俯仰和面内旋转电机。反射镜的方位和俯仰旋转也为串联驱动,同样通过继电器实现U4驱动器和反射镜方位/俯仰旋转的连接切换。这样4个电机驱动器控制16个步进电机,实现驱动器复用,节约了成本。
3.2 PLC电机断电相位记忆
步进电机(选用4相混合式)的4相绕组电压在断电时会分别处于某一相位电压(末相位),下次电机上电时的相位电压(初相位)如果和此相位不同,电机就会“抖动”。下位机系统采用PLC对电机断电相位记忆的方法去除抖动。切换光栅时,CP1H在停止被切换出的光栅方位、俯仰和面内旋转电机运行的同时,通过把从步进电机驱动器环形分配器取出的光栅各维电机的末相位保存到PLC数据存储区(如图3)。对于切换进的当前光栅,在关闭各维电机驱动器使能的前提下,给各维电机驱动器的脉冲输出口发送持续脉冲,对各维电机当前相位和该光栅保存的末相位进行比较,直到初相位和末相位相等时,再打开电机驱动器的使能,这样就有效地去除电机的“抖动”。反射镜方位旋转和俯仰旋转切换时,同理也采用了PLC断电相位记忆。
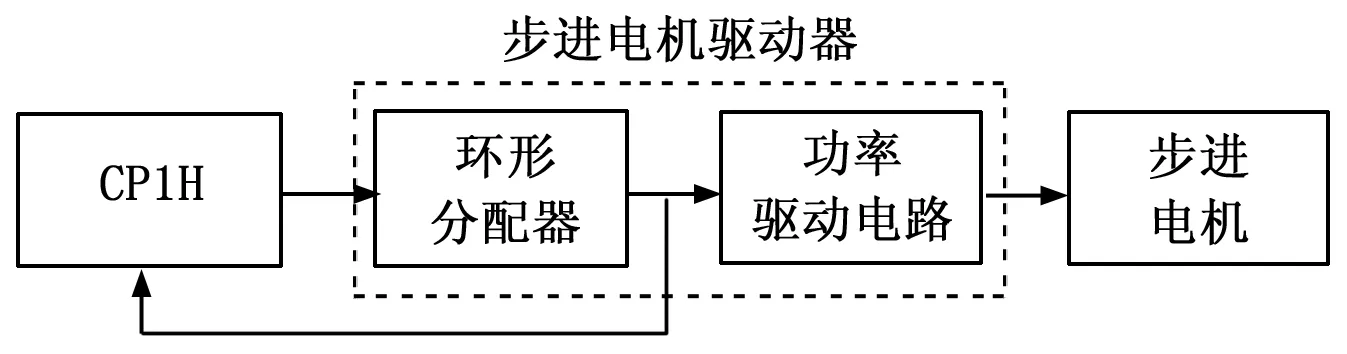
图3 PLC对电机断电相位记忆
3.3 下位机梯形图程序框图
下位机PLC周期扫描运行的梯形图程序的功能模块框图如图4。初始化模块实现当前光栅的切换选择、反射镜方位/俯仰运动的切换以及报警输出等。光栅方位旋转模块、光栅俯仰旋转模块和光栅面内旋转模块分别实现光栅方位旋转、光栅俯仰旋转模块和光栅面内旋转的正向和方向设定以及点动、定长和连续模式的控制。反射镜模块实现反射镜方位旋转或俯仰旋转的正向和方向设定以及点动、定长和连续模式的控制。
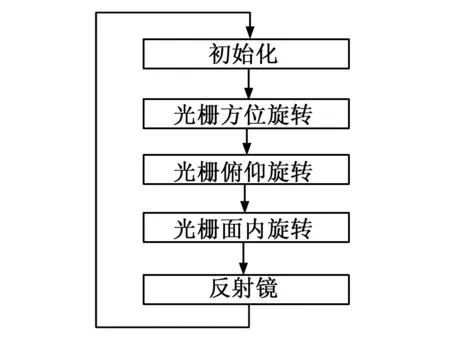
图4 下位机梯形图程序框图
4 光栅/反射镜转角分辨率分析
无论是光栅的三维姿态调节还是反射镜的二维姿态调节都是针对角度的高分辨率微调。角位移微调机构(如图5)利用了正弦机构的杠杆传动原理,它由步进电机、谐波减速器、精密丝杆传动副、摆杆组成。摆杆微摆动是对某维姿态角度调整的抽象简化。步进电机通过步进电机驱动器接收PLC发出的脉冲信号,经过减速器减速后,驱动丝杆转动,带动螺母做直线运动,螺母再推动摆杆绕中心点O摆动,从而改变目标角度。
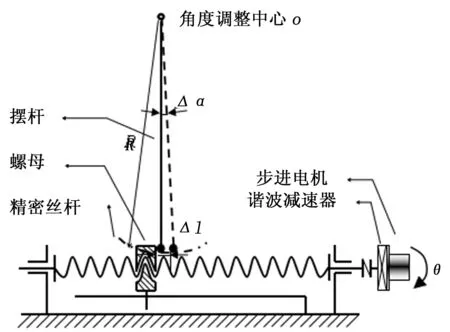
图5 角位移微调机构原理图
转角分辨率是指PLC发送1个脉冲,光栅/反射镜某维角度(对应图中的摆杆摆动)的改变量。设步进电机的固有步距角为θ°,谐波减速器的减速比为i,丝杆导程为δmm,螺母的直线微位移为Δl,摆杆的角度微位移为Δα。摆杆的杆长为Rmm,有:

(1)
当Δα趋于0时,sinΔα≈Δα,有:

(2)
从算式可以得出Δα=δ×θ/(R×i×360), 以光栅方位旋转为例,取δ=4 mm,θ=1.8°,i=100,R=212 mm,代入式(2),可以计算出光栅方位旋转理论转角分辨率Δα=0.943 urad,它略高于表1所要求的0.96 urad,这是考虑到机械装置实际刚度、间隙和传动比的精度影响,实际的转角转角分辨率会小于理论的转角转角分辨率。同理可分别计算出光栅/反射镜其他维度的转角分辨率。
5 系统实际应用及实验验证
系统经过设计、实现和调试,最终成功部署到应用现场。实验操作人员通过图2所示监控界面来对当前光栅的方位旋转、俯仰旋转、面内旋转和反射镜的方位旋转或俯仰旋转按点动、步长和连续控制3种方式之一来调节控制角度。
表3和表4分别列出了光栅/反射镜在各维角度调整的2个极限位置之间多次测试得到的实际脉冲数和实际转角分辨率,达到了设计要求提出的角度分辨率的要求。

表3 光栅实际转角分辨率

表4 反射镜实际转角分辨率
6 结束语
本文针对实际应用提出的设计目标,从系统总体控制方案、上位机监控软件设计、下位机PLC控制系统设计、光栅/反射镜转角分辨率分析和系统实际应用及实验验证等方面讨论了对激光光栅和反射镜姿态调节系统的设计实现过程。在开环控制的方式下,通过角位移微调机构实现了光栅/反射镜转角分辨率的高精度调整。这种通过上位机和下位机对精密机械装置进行的可视化开环高精度转角分辨率的调节控制方式,对其他类似的精密机械装备的高精度角度调整具有借鉴意义。
[1] 何 凯,刘世杰,童 玲,等.用于脉冲压缩光栅的宽带高分辨率光谱测量技术[J].光学学报,2013,33(10):28-33.
[2] 史雅莉,高云国,邓国杰,等.新型光轴平行度装调仪的设计与分析[J].激光与红外,2007,7(10):1098-1104.
[3] 聂晓倩,高云国,邵 帅,等.新型高精度二维微调反射镜结构设计[J].工程设计学报,2010,17(5):396-400.
[4] 肖明耀.欧姆龙CP1H系列PLC应用技能实训[M].北京:中国电力出版社,2011.
[5] 徐 峰,李庆祥.精密机械设计[M].北京:清华大学出版社,2005.
[6] 田学光,田兴志,刘 轩,等.大型精密转台高精度角度微驱动装置的研制[J] .光学精密工程,2010,18(05):1112-1117.
[7] 陈 灏.双晶单色器纳弧度级角度微调装置机构设计[J] .光学仪器,2008,30(03):46-49.
[8] 徐世许,朱妙其,王毓顺.可编程序控制器—原理·应用·网络[M] .合肥:中国科学技术大学出版社,2008.
[9] 陈大程.基于HOSTLINK协议的FINS通信[J].工业控制计算机,2012,25(5):16-17.
[10] 徐世许,郑 健,孙卫国. 基于FINS协议的Controller Link网监控系统设计[J].计算机工程,2007,33(10):95-97.
[11] OMRON Corporation.CS/CJ/CP/NSJ Series Communications Commands Reference Manual [EB/OL].[2010-02-01]. http://www.fa. omron. com.cn/data_pdf/mnu/w342-e1-15_cs1_cj1_cp1_com_cmd.pdf?id=2045.
[12] 李长林. Visual Basic串口通信技术与典型实例[M].北京:清华大学出版社,2006:23-28.
[13] 马继东,王立海.VB环境下OpenGL的使用[J].森林工程,2007,23(3):91-93.
[14] 任 凯,浦金云,余桂明.基于VB的OpenGL技术构建可操作的三维舰艇模型[J] .武汉理工大学学报(交通科学与工程版),2008,32(6): 1129-1132.
High Precision Open Loop Control for Attitude Adjustment of Laser Raster and Reflector
Xu Shuye,Zhang Yanan,Lu Linhai,Qian Jinwu
(School of Mechatronics Engineering and Automation, Shanghai University, Shanghai 200072, China)
In order to improve the precision alignment of laser beam in high power laser physics experiments, an open loop control system is proposed for attitude adjustment of laser raster and reflector, which is composed of the upper machine, the lower machine and the angular displacement adjustment mechanism. From the application layer communication protocol, HostLink (Fins) protocol and 3D pose simulation, the design of the upper computer monitoring software is introduced; From the step motor driver reuse, the phase memory of the PLC motor and the program block diagram of PLC,the design of the lower PLC control system is discussed. The realization principle is analyzed which high precision angle resolution is achieved by converting the linear micro displacement of the screw nut to the angular micro displacement in angular displacement adjustment mechanism. With the experimental data, the actual angular resolution is verified to meet the requirements of high precision. The results show that the open loop control system can achieve high precision adjustment control for the laser raster and reflector, and can also be used for other similar experiments.
raster;reflector;attitude automatic adjustment;open loop control;angular micro displacement
2015-11-19;
2015-12-15。
许树业(1971-),男,湖北洪湖人,硕士,工程师,主要从事计算机应用与工业自动化的研究。
1671-4598(2016)06-0084-03
10.16526/j.cnki.11-4762/tp.2016.06.023
TP24
A
