基于模糊逻辑的无人机定位系统设计
2016-11-17王军强蒋卫东袁智荣吴一坤
王军强,蒋卫东,袁智荣,吴一坤
(1.西北工业大学无人机研究所 ,西安 710065; 2.西北工业大学,西安 710072)
基于模糊逻辑的无人机定位系统设计
王军强1,蒋卫东2,袁智荣1,吴一坤2
(1.西北工业大学无人机研究所 ,西安 710065; 2.西北工业大学,西安 710072)
针对无人机定位精度问题,硬件设计采用模块化设计思想,以STM32系列的微控制器为核心,以微机械传感器和GPS 模块为基础,组成无人机组合导航系统;软件提出了基于“模糊逻辑”的加速度区间自适应算法,修正惯导定位误差随时间快速积累、GPS发射信号受阻,造成的连续定位能力和精度较差的问题,保证了系统定位精度,为小型自主起降固定翼无人机、多旋翼无人机定位奠定基础。
模糊逻辑;无人机;定位系统
0 引言
模糊逻辑是指对于模型未知或不能确定的系统,以及强非线性、大滞后的控制对象,应用模糊集合和模糊规则进行推理,模仿人脑对不确定性概念判断、推理的思维方式,通过模糊综合判断、推理,解决常规方法难于对付的规则型模糊信息问题。模糊逻辑善于表达界限不清晰的定性知识与经验,它借助于隶属度函数概念,区分模糊集合,处理模糊关系,模拟人脑实施规则型推理,解决因“排中律”的逻辑缺陷产生的种种不确定问题。
GPS可以在全球任何地方提供用户精确的位置信息,但动态性能差。GPS卫星发射的信号受阻挡后会引起失锁和定位精度差的问题。惯导系统通过测量陀螺仪和加速度计信息,然后送至数字计算机中,通过数学积分计算得出定位数据。它通过测量载体设备,独立自主进行定位,具有工作条件不受气象和人为外界干扰等一系列优点。但惯导定位的缺点是其定位误差会随时间快速积累。因此,由GPS和惯导定位系统组成的组合导航系统是一种理想选择。在理想的情况下,组合导航系统可以提供高精度、高频率和高可靠性的定位数据。但无人机飞行是一个动态的过程,组合导航动态定位数据中存在着影响定位精度的随机误差,采用性能良好的数据融合算法,来优化组合导航定位是一个有效解决途径。基于此,本论文提出了基于“当前统计”模型的加速度区间模糊逻辑算法,应用于载体“当前统计”模型的加速度方差自适应卡尔曼滤波算法中,来提高组合导航的定位精度。
1 系统设计方案
本论文的主要工作是提高无人机的定位精度,以高性能、低功耗的STM32系列芯片作为嵌入式处理器,结合各种MEMS微传感器,GPS模块,构成组合导航系统;同时针对惯导系统较差的长期误差特性和GPS较差的短期误差特性,研究了基于“当前统计”与“模糊逻辑”的加速度方差自适应卡尔曼滤波算法,来提高获取数据的精度,满足无人机定位精度的需求。
该系统硬件采用模块化的设计思想,以降低各个模块之间的耦合度。硬件方面:微处理器选用硬件资源与外围设备接口丰富的处理器,传感器、GPS选用高集成度的数字模块,使处理器与各个传感器模块连接简单,降低电磁干扰。
软件基于机动目标较合理的“当前统计”模型,根据无人机的动力学特性,采用模糊逻辑确定合理的加速度区间,使模型能更适合无人机运动的实际。在模型参数确定时,还必须合理调整加速度方差,使其能实时反映加速度变化,为此提出了加速度方差两段函数。
2 硬件设计
本论文无人机定位数据采集系统,硬件部分使用模块化、接口标准化的设计方法,保证系统具有互换性强、扩展性好、可靠性高的特点。数据采集系统结构框图如图1所示。
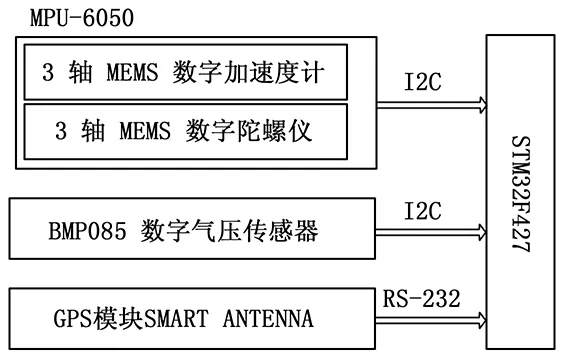
图1 数据采集系统结构框图
2.1 微控制器模块
微处理器作为数据处理和飞行控制的核心,必须具有较强的数据处理能力,还要具备丰富的硬件资源与外围设备接口,实现与惯性传感器、GPS接收机等的信息交互。
在考虑以上前提下,本文选择了基于Cortex-M4内核的STM32F427微控制器,STM32F427微控制器具有32位精简指令集(RISC),主频为168 MHz,处理速度为252 MIPS,具有浮点运算单元(FPU),支持单精度浮点数运算和处理,同时还集成了 DSP指令单元和内存保护单元;并带有2M Flash,256KB RAM存储器;通信接口:4路USART,4路UART,6路SPI,3路内置数字滤波功能的I2C,2路CAN,SDIO, 2路USB OTG;2路12位DAC,3路12位ADC,高达17个16/32位定时器。多路串口、I2C 和SPI,方便处理器与传感器的连接,提高了数据采集的精度,也大大简化了开发的难度。
2.2 传感器模块、GPS模块
为了更好地实现稳定飞行和轨迹预测,要求无人机具有精度较高的姿态、导航测量系统。本设计利用惯性导航器件MPU-6050数字传感器和GPS进行松耦合,构成闭合反馈电路,消除积分带来的漂移误差,获取精确的导航信息,松耦合组合导航系统如图2所示。同时为了提高无人机的定位精度,可以利用气压传感器测量大气压强,根据气压和海拔高度的对应关系,算出海拔高度,修正GPS的高度数据;并且可以通过一对气压传感器测量的动静气压差值,计算出无人机的飞行速度,修正速度数据[1]。
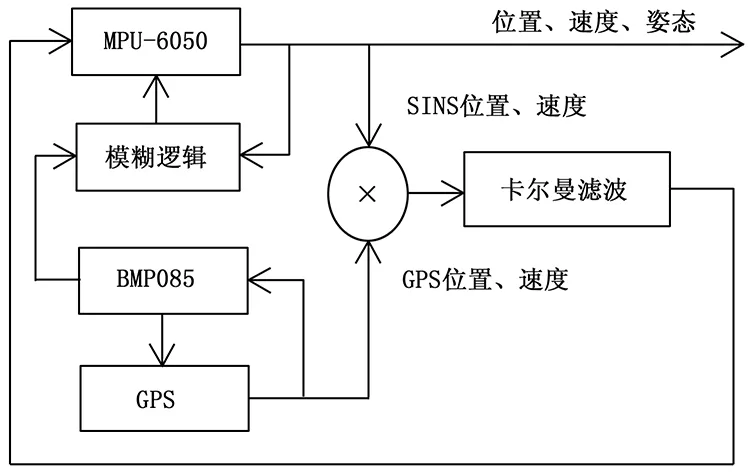
图2 松耦合组合导航系统
随着微机电(MEMS)技术的迅速发展,MEMS器件实现了体积小、重量轻、耗能低、高精度、高性能等优良特性。本设计中使用
MPU-6050传感器,它集成了3轴MEMS数字陀螺仪,3轴MEMS数字加速度计,以及一个可扩展I2C接口,可以与第三方的数字传感器相连。加速度计与陀螺仪之间没有轴偏角,消除了陀螺仪与加速度计轴间的敏感度,降低了系统耦合影响和传感器漂移误差。MPU-6050与STM32F427通过I2C接口相连接。BMP085是一种数字气压传感器,与STM32F427通过I2C接口进行通信。数字传感器与微处理器通信方式简单,具有统一的I2C通信接口,优化了系统的组合结构,
增强了系统的抗干扰能力,简化了PCB的布局布线。SMART ANTENNA,是一款将GPS接收机(内置SUPERSTAR II板卡)和天线集成为一体的12通道L1单频GPS产品。标准版提供1HZ PVT输出和实时的DGPS定位,支持SBAS。它有多种配置类型,包括RS-232或RS-242接口,具有PPS输出功能。SUPERSTAR II 是一款12通道的L1单频GPS接收机产品,尺寸仅为46 mm x 71 mm,功耗低,标准的1 Hz PVT输出,可实现实时DGPS定位,支持SBAS差分修正服务,它有5 V和3.3 V两种类型。
3 软件设计
3.1 “当前统计”模型确定
无人机运动规律是随机的,但是下一时刻加速度取值是有限的,且只能在当前加速度的邻域内变化,为此提出了机动目标“当前”统计模型[2]。该模型本质上是非零均值时间相关模型,其机动加速度的当前概率密度用修正的瑞利分布来描述,均值为当前加速度预测值。
当前统计模型离散状态方程为:


3.2 加速度方差自适应卡尔曼滤波算法
amax与a-max通过模糊逻辑方法确定。
3.3 加速度区间的模糊逻辑确定
无人机飞行过程中,加速度与气压状况、飞行姿态等有复杂的非线性映射关系,因此采用模糊逻辑控制来确定合理的加速度区间,使模型更能适合无人机运动的实际情况。
模糊逻辑控制是一种基于模糊逻辑的控制方法。模糊逻辑可以对任意复杂的非线性函数建模。它的关键是引进了模糊集、隶属函数、模糊推理和模糊算法。它不同于经典的集合论和控制论。模糊逻辑控制有四部分组成:由输入控制量的值定义隶属函数的值;确定由if ...then规则组成的模糊规则库;通过模糊算法,采用基于知识库或专家系统的模糊推理规则,把系统的输入输出从确切的数字量改为相应的模糊语言;采用一定的解模糊方法,解出根据模糊推理得到的控制量模糊集合,来产生最可能的控制输出。模糊逻辑控制的基本结构如图3所示。
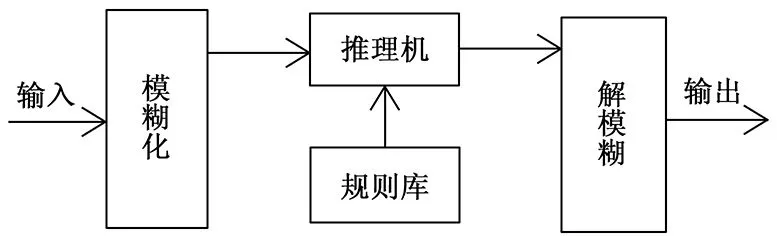
图3 模糊逻辑控制基本结构

文中使用大气压值、姿态角和当前加速度的正负作为模糊控制器的输入变量。基于“当前统计”与“模糊逻辑”的加速度方差自适应卡尔曼滤波算法流程图如图4所示。
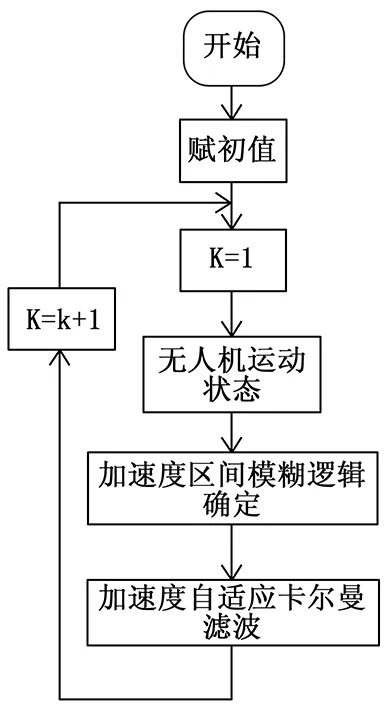

图4 基于“模糊逻辑”的加速度方差自适应算法
3.4 传感器数据采集系统软件设计
首先,采集MEMS陀螺仪、加速度计、气压传感器、差分GPS数据,然后通过基于四元数方法的航姿解算,以及基于卡尔曼滤波算法的数据处理和数据融合技术,得到无人机实时的位置、姿态角度、航向角、高度、速度、三轴角速度、三轴加速度等导航数据。组合导航系统数据采集流程图如图5所示。
图5 组合导航系统数据采集流程图
4 实验结论与分析
利用Matlab仿真比较加速度区间模糊逻辑确定的加速度方差自适应卡尔曼滤波算法和加速度区间固定的加速度方差方差自适应卡尔曼滤波算法,试验中采样周期,仿真时间都相同,采集传感器的输出作为模糊控制器的输入,确定大气压值、姿态角和当前加速度的模糊辞集合和模糊区间,并确定模糊控制器的模糊规则,使用的解模糊方法为重心法,模糊控制器的输出为加速度的最大值。仿真结果表明,相对于固定的最大加速度区间,通过模糊逻辑确定的加速度区间,模糊逻辑自适应卡尔曼滤波的位置误差比常规的卡尔曼滤波位置误差小的多,而且滤波相当稳定,更能自适应的调整加速度区间,使其和实际物理过程更吻合,减少了状态误差。
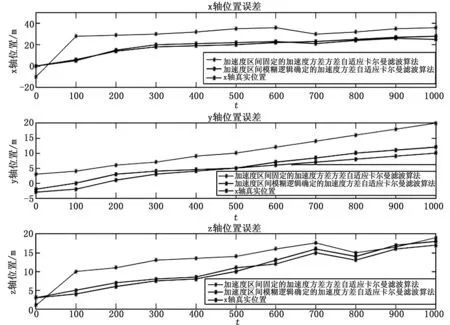
图6 实验仿真图
5 总结
本文以提高无人机定位精度为目标,考虑到单独使用一种导航系统的局限性,本文设计了组合导航系统,并结合无人机组合导航系统的实际问题,提出了基于“当前统计”与“模糊逻辑”的加速度方差自适应卡尔曼滤波算法。从确定合适的机动目标“当前统计”模型和加速度区间,来满足无人机定位精度和其对环境适应能力的需求。
[1] 李 森. 小型无人机自驾仪的设计及其控制算法研究[D].北京:北京理工大学,2015.
[2] 周宏仁. 机动目标“当前”统计模型与自适应跟踪算法[J]. 航空学报,1983(1):73-86.
[3] 刘望生,李亚安,崔 琳. 基于当前统计模型的机动目标自适应强跟踪算法[J]. 系统工程与电子技术,2011(9):1937-1940.
[4] 郑贵省.GPS/DR车载组合定位系统数据融合算法研究[D].天津:天津大学,2005.
Design of UAV Positioning System Based on Fuzzy Logic
Wang Junqiang1, Jiang Weidong2, Yuan Zhirong1, Wu Yikun2
(1.UAV Institute, Northwestern Polytechnical University, Xi’an 710065, China;2.Northwestern Polytechnical University, Xi’an 710072, China)
Aiming at the problem of UAV positioning accuracy, the hardware uses modular design idea to design a integrated navigation system, based on micro mechanical sensor and GPS module, with STM32 series microcontroller as the core. Software is put forward acceleration interval adaptive algorithm based on the “fuzzy logic” to ensure the accuracy of the positioning system by correcting the INS positioning error with time fast accumulation and sloving the problem of the ability of continuous positioning and poor accuracy when the GPS transmit signal is blocked. The design lays the orientation foundation for small autonomous takeoff and landing of a fixed wing UAV and multi rotor UAV.
fuzzy logic; UAV; positioning system
2016-04-18;
2016-05-05。
王军强(1976-),男,陕西合阳人,高级工程师,主要从事机载计算机方面研究。
1671-4598(2016)09-0234-03
10.16526/j.cnki.11-4762/tp.2016.09.065
TP273
A
