基于飞行器网络控制系统的多速率控制器设计
2016-11-17耿燕丽
刘 斌,耿燕丽,李 君
(武汉科技大学 信息科学与工程学院,武汉 430080)
基于飞行器网络控制系统的多速率控制器设计
刘 斌,耿燕丽,李 君
(武汉科技大学 信息科学与工程学院,武汉 430080)
为了减少网络环境中的时延和数据包丢失对飞行器网络控制器系统的影响,设计了一种具有多速率的保性能控制器设计方法;多速率是指在具有多通道数据传输的系统中,各通道所需控制输入的频率不完全相同;在存在时延和丢包的情况下,利用增广技术对飞行器控制系统在整个循环周期内建立离散模型,此时为了使多速率控制方法更加有效,先基于此模型在控制器输入端构造一个预测器,根据预测器的输出为整个系统设计一个具有多控制速率的动态输出反馈控制器;然后给出并证明保性能控制器的存在条件和求解方法;最后通过某飞行器网络控制系统的数值算例验证了所提方法的有效性。
飞行器网络控制系统;多速率控制;输出预测器;保性能控制
0 引言
网络控制系统由于其能够资源共享,且布线简单等优点,主要应用于远程控制系统和复杂控制系统中[1]。大多数的实际系统都是具有多个控制信号的多输入多输出控制系统,但是对这些系统的控制方法的研究,都是将某个特定的物理信号独立出来进行系统分析和控制器设计。有时为了提高控制性能,需要将系统中的所有控制信号综合考虑进行控制器设计。对于传感器和控制器广泛散布的多输入多输出网络控制系统来说,为了保证系统的实时性,通常不会把所有节点的信息封装到一个数据包后再进行传输,而是由各个设备直接传递信息,这就需要多包传输技术[2]。对于采用多包传输技术的多输入多输出网络控制系统来说,其模型建立过程以及控制算法的设计过程就会更加复杂。
具有多通道传输的飞行器姿态控制系统就是一种典型的多输入多输出控制系统。随着现场总线技术、计算机控制技术及航空航天技术的不断发展,在保证飞行器可靠的稳定性能后,现代飞行器需要向着管控一体化以及更加轻便的方向发展。因此,越来越多的现代飞行器开始将系统中的各个设备通过多级数据总线连接构成飞行器网络控制系统。在飞行器中加入网络能够很好的解决系统内部越来越复杂的资源共享和信号传递的问题,成功克服了传统的点对点传输方式布线复杂、维护成本高、体积庞大等缺陷。但是,飞行器控制系统是硬实时系统,若网络满足不了系统的时限要求,就会带来灾难性后果。文献[8]针对具有多通道数据传输的多输入多输出飞行器网络控制系统在同时存在时延和丢包的网络环境下,采用状态观测器后利用李雅普诺夫函数得到系统的稳定条件。文献[9]研究了延时和数据丢包对具有多通道数据传输的飞行器网络控制系统的影响,并讨论了系统的故障检测问题。
一般的多速率控制方法只是加快了控制器的采样频率,而控制量仍然在控制器接收到数据后才会发生变化,控制序列具有很大的保守性。在存在短时延且数据包丢失概率已知的网络环境,本文为具有多通道数据传输的飞行器网络控制系统提出了一种具有多控制速率的保性能控制器设计方法。本文首先利用增广技术在整个循环周期内建立飞行器姿态控制系统的离散模型,基于此模型在动态输出反馈控制器输入端构造一个预测器,根据预测器的输出设计一个具有多控制速率的控制器。
1 飞行器姿态网络控制系统模型分析
本文研究的多通道数据传输的飞行器姿态网络控制系统结构框图如图1所示。此飞行器网络控制系统采用多级总线技术,其中控制模块(控制器到执行器)采用单独的码速率较高的专用总线(MILSTD1553B总线)作为一级总线。测控模块(传感器到控制器)的数据交换主要采用CAN总线作为二级总线。
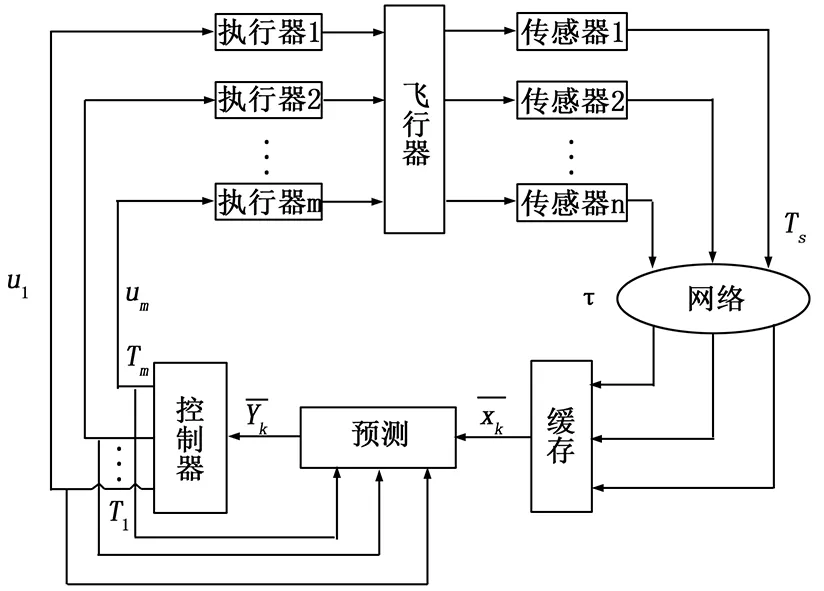
图1 飞行器姿态网络控制系统
图中Ts为传感器的采样周期,T1…Tm为各回路控制器的采样周期。
设飞行器姿态控制系统的连续时间状态空间模型为:
(1)

为方便描述问题,首先给出如下假定条件。
假设1:各传感器节点的数据采用单包传输,且在数据包内包含必要的时间信息、节点信息。
假设2:传感器节点与控制器节点均采用时间驱动。
假设3:各节点时钟同步。可以采用定时发送同步帧的方式,让各节点校对时钟,使得各节点之间的时钟不同步保持在非常小的范围内,可以忽略不计。
假设4:网络诱导时延小于一个传感器采样周期。控制器根据节点标识和时间戳判断数据是否“新”,是则保存数据,否则丢弃该数据,因此网络诱导时延满足0<τ 假设5:取传感器的采样周期Ts为整个系统的循环周期T0,并且各控制回路的控制频率是传感器采样频率的整数倍。 在采样时刻到来时,所有传感器节点同时以采样周期Ts对被控对象的状态进行采样,并将采样数据和节点标识组成数据包,然后向网络发送数据。为了使多速率控制输入更加有效,控制器接收到数据后,先存入缓存中,在计算时刻到来时,首先利用预测算法预测被控对象的输出值,然后控制器根据预测输出值计算控制序列,最后各控制回路以采样周期Tj依次向各执行器发送控制量。执行器采用事件驱动,即在控制器输出后立即执行。各控制回路采样周期间的关系如下: T0=Ts=NjTj=NjljT=NT,(j=1,…,m) 其中,N为所有Nj的最小公倍数,T为多速率采样控制系统的基本采样周期,Nj,lj均为正整数。 由于网络诱导时延的影响,若传感器数据成功传输到控制器节点,控制器可以使用当前数据,否则,控制器使用缓存中保存的上一次接收到的数据,则有如下关系成立: (2) 由于被控对象输入的多采样特性,本文采用增广技术把所考虑的系统建模成向一个向量维数更高的单速率网络控制系统。具体如下: 被控对象在一个系统循环周期T0内的所有控制输入量为: (3) 其中:第j个回路在一个系统循环周期T0内的所有控制输入量为: 则被控对象可以离散化为: (4) 根据被控对象离散模型(4),被控对象的输出以步长为T的i步向前预测值为: 定义输出预测序列: (5) 结合公式(2)和(3),预测模型可以简化为如下矩阵形式: (6) Nij是满足cTj≤iT的最大c值。 本文采用的的数字化动态输出反馈控制器形式如下: (7) 其中:ψ(kT0)∈Rp为控制器的状态。 为了得到被控对象经过网络在控制律下的闭环系统模型,定义了增广向量: Z(k)=[xT(kT0) ψT(kT0)]T,结合公式(4)和(7),可得: (8) 其中: 对被控对象,定义性能指标为: (9) 引理1[7]:给定适当维数的矩阵W,M和N,其中W是对称的,则W+NTFTMT+MFN<0对所有满足FTF≤I的矩阵F成立,当且仅当存在一个常数ε>0,使得Y+εMMT+ε-1NTN<0。 其中: 根据schur补理和引理1,可得以下的定理给出了系统(1)存在保性能控制律的一个充分必要条件。 定理1:对于存在数据包丢失,并且网络诱导时延满足的网络控制系统,如果存在对称正定矩阵P0,P1,P2∈Rn×n,S0,S1,S2∈Rp×p,满足条件: (10) (11) 证明:选择对称正定矩阵P0,S0,P1,S1,P2,S2,令Lyapunov泛函V(K)为: 当V(k)沿系统任意轨线的差分为: 由不等式(10),可以得到: 另外,ZT(k)ΩZ(k)<-E[ΔV(k)],不等式两边对k从0到∞求和,并利用系统稳定性,可以得到: 即可得公式(11),也即定理1成立。 定理2:对系统(4),在控制律(7)作用下,如果给定的常矩阵U、U1、Q、R,以下优化问题: s.t (12) (13) 且系统的最优性能指标为: 证明: 由定理1中不等式(10)可得系统稳定,将表达式Φ,Φ1,Φ2,Π,Π1,Π2代入定理1中不等式(10)可得不等式(14): (14) 将不等式(14)两边同时乘以diag{ε,ε,ε,ε,ε,ε,ε,ε,I,I,I,I},对所得不等式依次经过引理1和Schur补引理,然后令: (15) 即可得到条件不等式(12),即可保证系统的稳定性。 定理1中所得到的闭环性能指标的上界依赖于初始状态x(0),x(-1),x(-2),ψ(0),ψ(-1),ψ(-2),然而, 在实际系统中,人们往往难以精确确定系统的初始状态为克服这个困难,我们假定: 其中:U和U1是给定的常矩阵。代入公式(11),可得: 某飞行器姿态控制系统连续状态空间模型[14]为: 输出预测矩阵为: 通过线性矩阵不等式方法可以得到控制器参数为: 系统的性能指标为J≤17.0679。 图2 攻角和俯仰角角速率响应曲线 图3 升降舵偏角、升降舵补助翼偏角和鸭翼偏舵偏角曲线 由图可知,攻角和俯仰角3秒左右进入稳态,响应加快,而且所需的升降舵偏角、升降舵补助翼偏角和鸭翼偏舵偏角较小,飞行器姿态控制系统比较容易实现。 本文针对具有多通道数据传输的飞行器姿态控制系统采用了多速率的控制方法,为了系统的使控制输入序列更加有效,提出了一种基于输出预测的具有保性能控制特性的动态输出反馈控制器设计方法。通过为系统建立离散模型、设计控制器、数值仿真,获得了攻角和俯仰角角速率响应曲线和所需的升降舵偏角、升降舵补助翼偏角和鸭翼偏舵偏角曲线。本文中的方法可以减少具有复杂计算功能的智能系统达到稳定状态的时间。 [1] Hespanha J P, Naghshtabrizi P, Xu Y G. A survey of recent results in networked control systems[J].Proceedings of IEEE, 2007(95):138-162. [2] Dong C Y,Xu L J,Chen Y,et al. Networked flexible spacecraft attitude maneuver based on adaptive fuzzy sliding mode control[J]. Acta Astronautica, 2009(65):1561-1570. [3] Liu Dianting, Li Haixia. Modeling and stability analysis of Multi-rate MIMO networked control systems with output feedback[A].2011 International Conference on Network Computing and Information Security[C].IEEE, 2011. [4] Mao Z H, Jiang B, Shi P. Fault-tolerant control for a class of nonlinear sampled-data systems via a Euler approximate observer[J]. Automatica, 2010(46):1852-1859. [5] Wang Zhiwen, Gao Honghong. Linear quadratic optimal control of networked control system[A]. the 27thChinese Control and Decision Conference[C]. IEEE, 2015. [6] Wang Y M, Ye H, Wang Y Q. Fault detection of networked control systems subject to uncertain time-varying delay and packet dropout[A].2009 Fourth International Conference on Innovative Computing,Information and Control (ICICIC09)[C]. Kaohsiung,Taiwan, 2009. [7] He X,Wang Z D,Zhou D H. Robust fault detection for networked systems with communication delay and data missing[J]. Automatica, 2009(45):2634-2639. [8] 王 青, 王昭磊, 祁成东. 具有多通道数据传输的飞行器网络控制系统故障检测[J].控制与决策, 2014, 29(8):1401-1407. [9] Zhang Y, Liu Z X, Fang H J, et al.H∞ fault detection for nonlinear networked systems with multiple channels data transmission pattern[J].Information Sciences, 2013(221):534-543. [10] 牛尔卓,王 青,董朝阳.一类飞行器网络控制系统的鲁棒故障检测算法[J].宇航学报, 2012, 33(12):1376-1341. [11] Sun Liankun, Wan Zhenkai, Zhang Guiling. LQG control Design for a Class of MIMO Networked Control System[A].The 29th Chinese Control Conference[C].IEEE, 2010. [12] 樊卫华,陈晓杜,谢蓉华,等. 基于时间片划分的异步采样MIMO网络控制系统[A].Proceedings of the 10th World Congress on Intelligent Control and Automation[C]. IEEE, 2012:224-228. [13] Chao Y C, Chi M, Guan Z H, et al. Optimal tracking performance of MIMO networked control systems with communication constraints[A]. 26th Chinese Control and Decision Conference[C]. USA:IEEE, 2014:432-436. [14] Niu Erzhuo, Wang Qing, Wang Mingming. Multi-indexes robust fault detection of aircraft networked control systems[J]. Journal of Beijing University of Aeronautics and Astronautics. 2013(39):813-817. Guaranteed Cost Controller with Multi-rate for Networked flight control system Liu Bin, Geng Yanli, Li Jun (School of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430080, China) In this paper, the guaranteed cost controller with multi-rate sampling is designed for the networked flight control systems with multiple data transmission channels, under the consideration of the networked-induced time delay and packet dropout. Multi-rate refers to different sampling period for each channel in systems with multiple data transmission channels. Considering the time delay and packet dropout, this paper firstly establishes the model for the networked flight control systems over the entire cycle period with the lifted technology. Based on this model, a predictive equation for the output of the object and a dynamic output feedback controller with multi-rate are designed to make the multi-rate control actions more effective. Sufficient conditions to guarantee the stability and performance index of control system and solutions of this problem is derive. Then the numerical simulation on a networked flight control system is used to demonstrate the effectiveness of the proposed algorithm. networked flight control system; multi-rate control; output predictor; guaranteed cost control 2016-04-10; 2016-05-10。 刘 斌(1972-),湖北武汉人,女,博士,教授,博导,主要从事预测控制、系统建模及数据挖掘方向的研究。 1671-4598(2016)09-0158-05 10.16526/j.cnki.11-4762/tp.2016.09.044 TP13 A




2 保性能控制器设计






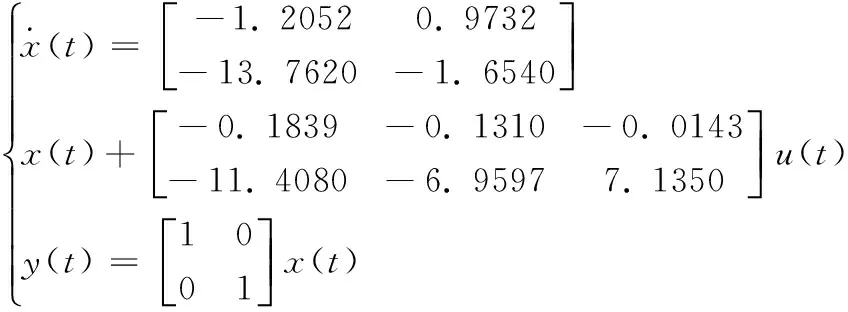
3 数值算例







4 结论
