一种用于运载器控制系统测试需求分析的工程化模型
2016-11-17李悦辰王志雅胡维俭
李悦辰, 王志雅, 胡维俭
(1.北京控制与电子技术研究所,北京 100038; 2.中国航天科工二院,北京 100854)
一种用于运载器控制系统测试需求分析的工程化模型
李悦辰1,2, 王志雅1, 胡维俭1
(1.北京控制与电子技术研究所,北京 100038; 2.中国航天科工二院,北京 100854)
针对现有的运载器控制系统模型不便于进行运载器控制系统测试需求分析的问题,综合运载器控制系统理论模型和实际的运载器控制系统,提出了一种用于运载器控制系统测试需求分析的工程化模型;验证结果表明,通过工程化模型得出的测试需求和目前实际产品的同层次测试项目基本是一致,改进模型是可用的、有效的。
运载器;测试需求分析;工程化模型
0 引言
运载器控制系统是一个精密而复杂的系统,为了确保其能正常完成任务,就必须利用测发控系统对运载器的控制系统进行全面的检查和测试[1]。但是现在每种型号的运载器都有专用的测试系统,不同型号间测试设备通用化程度低[2]。为了解决通用化的问题,有学者提出需要改变设计理念,从源头重新规划,将控制系统的设计和测发控系统的任务需求结合起来统筹考虑[3]。
为了在今后控制系统设计中提升通用化、系列化、组合化设计水平,从而缩短研制周期,改进运载器系统的保障性,需要根据运载器的基本功能对运载器控制系统测试的共性需求进行分析。而运载器的控制系统模型是分析的主要工具。
本文为解决测试需求分析的问题,在理论模型的基础上,提出了运载器工程化模型。对运载器控制系统测试需求分析具有一定的参考意义。
1 现有模型
以往在分析运载器控制系统测试需求时常用的模型有以下三类。
第一类,制导系统和姿态控制系统图。
如图1、图2所示,这是运载器的制导系统和姿态控制系统模型[4]。从图中能清晰地看出系统的功能组成和信息流程。但是,其缺点也非常明显。首先,通过图1、图2可以迅速的分析出控制系统具有的基本功能,比如惯性测量和导航计算等等。但不能将其与实际的仪器设备联系起来。其次,制导系统和姿态控制系统都隶属于控制系统,两幅图中存在功能重叠部分。这使分析过程中,需要区分其重叠的部分或者单独分析完毕后对重叠功能进行合并处理,增加了工作量。第三,模型理论性比较强,不能完全覆盖运载器控制系统的全部功能,比如电源配电、火工品发动机点火和保护等等。

图2 姿态控制系统模型
第二类,控制系统模型图。
如图3所示,这是一种典型的运载器控制系统模型[4]。它克服了上述模型的部分缺点。由于这是控制系统最基本的模型,从传统的控制理论出发我们可以将运载器中各个仪器和其在控制系统中的具体作用联系起来,便于进行测试对象功能和测试需求的分析。同样的,也避免了制导和姿态控制系统模型中的重复分析的问题。但是,这个模型依然较为理论化,不能完全覆盖实际运载器控制系统全部功能,不利于实际工程分析。
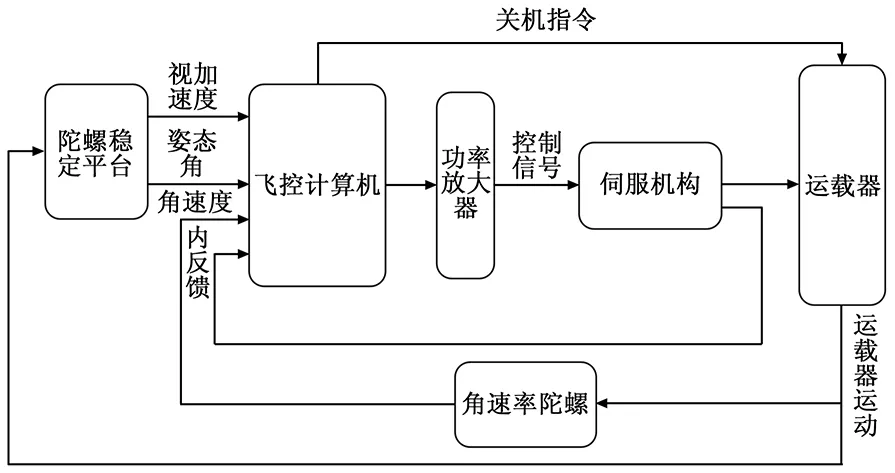
图3 运载器的控制系统模型
第三类,运载器的仪器配置图。
如图4所示,这是一种实际的运载器设备配置图[4]。和前两种不同,这是一种从工程角度出发的模型,是一种对之前理论化模型工程改进的一种方案。它在分析系统仪器组成和连接的时候有一定的优势,但是在测试需求分析时,使用起来并不方便。具体来说,从图中很难看出某个仪器设备在整个控制系统中起的作用,这为分析仪器的基本功能造成了困难。所以从运载器的基本功能入手的测试需求分析就更难进行下去。
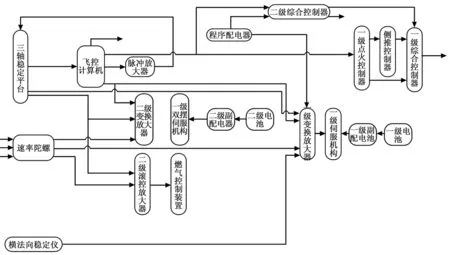
图4 某运载器的设备配置图
2 模型改进
根据之前的分析,我们以运载器的控制系统模型为起点并结合实际使用和控制系统设备的功能对模型进行改进,为了方便可以将实际的被控对象即运载器本身剥离于模型外。由此,通过基本的控制理论可得出运载器控制系统的理论模型,如图5所示。
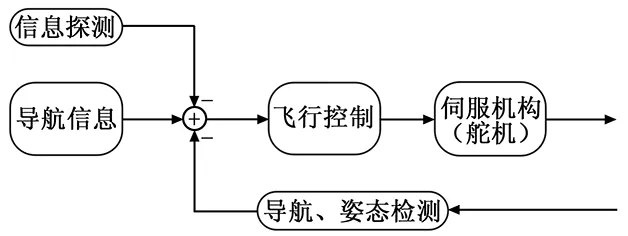
图5 运载器控制系统理论模型
图5中,发射前装定的导航信息和飞行中由信息探测装置探测到的实际信息是控制系统的给定量,飞行中由导航、姿态信息测量装置检测到的导航、姿态信息是控制系统的反馈量,而伺服机构则是控制系统的执行元件。这个模型涵盖了运载器控制系统的基本功能,从给定、测量、反馈到控制和指令执行。按照当前的控制系统设备功能划分对图5进行拆分和组合,得到如图6所示的物化模型。

图6 运载器控制系统物化模型(a)
图6中所有虚线部分对应的物理设备是飞控计算机,是具有接口和装定功能的控制器。信息探测、导航、姿态检测则由惯性器件结合其他敏感器来完成。将模型图中各个部分和相应的物理器件对应后,可得到图7。

图7 运载器控制系统物化模型(b)
图7中,信息探测和导航、姿态检测功能由运载器控制系统敏感器件完成,飞控机是控制器,伺服机构是执行机构。这个控制系统模型在理论上已经比较完整,但是通过分析,实际工作中控制系统不仅需要完成运载器姿态和飞行轨道的控制,而且还要完成运载器上仪器的配电,发动机保护及点火、火工品安全保护及点火等功能的控制。所以可以对其进一步改进,可得到图8。
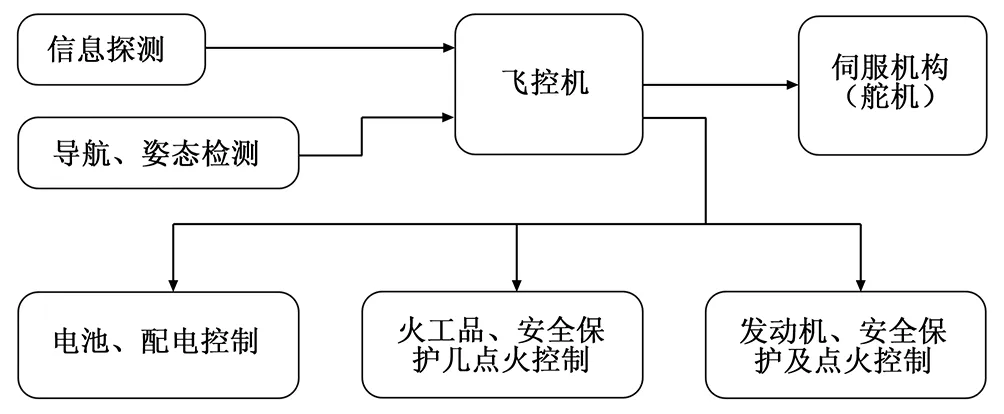
图8 运载器控制系统实用化模型
图8是在图7的基础上加入了电池、配电控制,火工品、发动机以及安全保护及点火控制这三部分。增加的三部分属于数字量控制,在控制过程中不需要将信号转变成模拟量,这和伺服机构有一定不同,所以将它们分开表示。这个模型相比之前的几个模型已经基本涵盖了控制系统在综合测试中需要测试的基本部件或者功能。但是它只能描述单级的运载器,而且在实际的应用中存在大量的多级运载器,所以还需要进一步改进,改进后可得到图9。
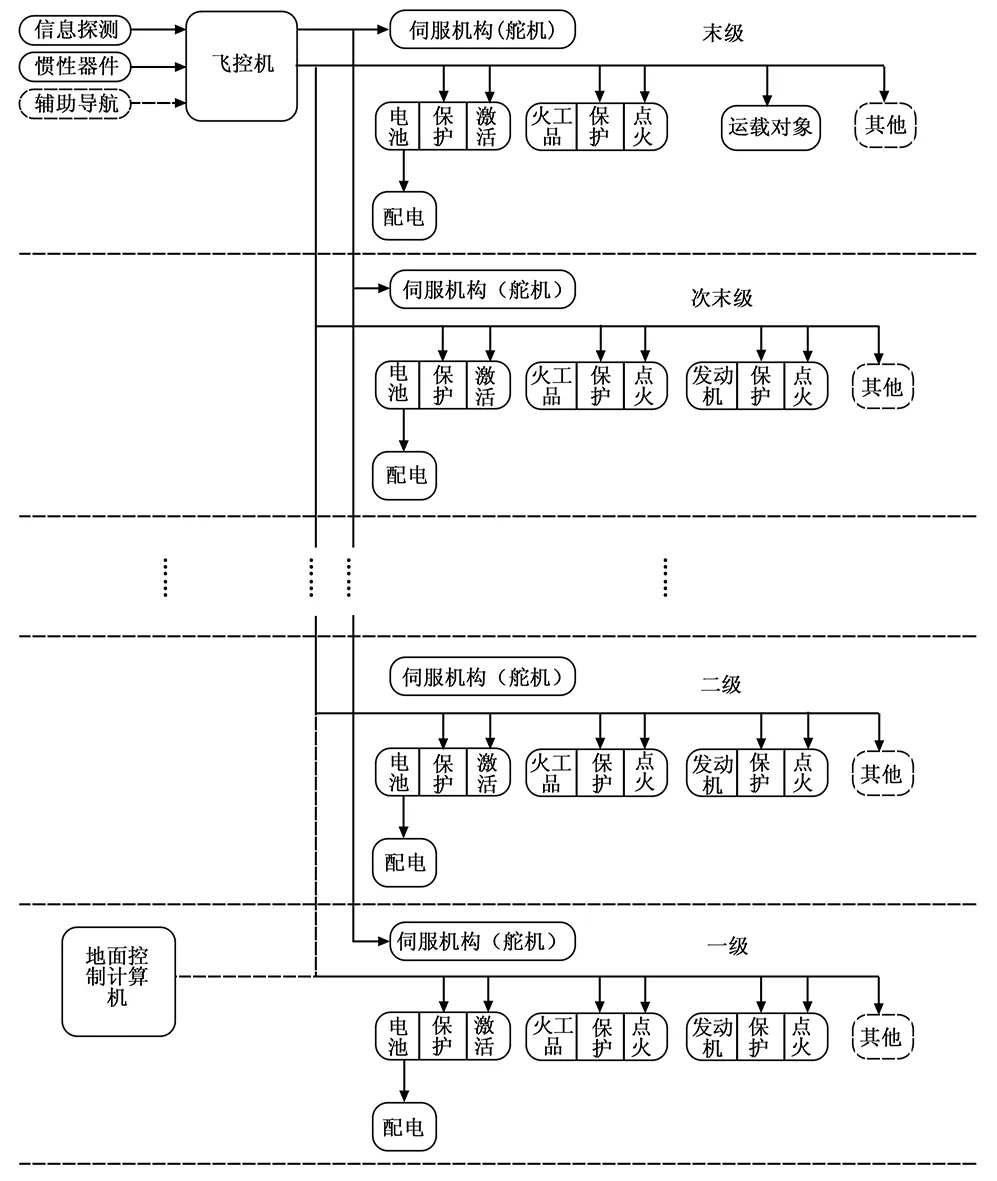
图9 运载器控制系统工程化模型
如图9所示,左边是控制系统的敏感器,可以是惯性器件,可以是其他敏感器,也可以是两者的组合。我们需要根据被分析对象的各自特点对这一部分进行相应的增减,比如有些运载器使用GPS辅助导航系统,那么就要将这些设备在图中体现,具体就是图中虚线框中的辅助导航设备。中间的飞控机也就是控制系统的控制器。右边则根据运载器的级数对之前的模型进行了相应的改进,现在进行简要说明。
首先,级与级之间以虚线隔开,级数可以根据运载器实际级数进行适当的增减;其次,运载器除了末级外的每一级都比较类似,都包括伺机构和电池、配电控制,火工品、安全保护及点火控制,发动机、安全保护及点火控制;第三,伺服机构的控制是模拟量控制,所以将它单列出来与其余的数字量控制区别开;第四,每一级中虚线框部分则可以根据实际情况进行增减,这一点和敏感器部分类似;第五,为了保证模型完整在末级中加入了运载对象,取消了已经包含在运载对象中的发动机部分。第五,不是所有的运载器一级部分的电池、火工品、发动机相关功能的控制都是由飞控机完成的,还有相当一部分是由地面控制计算机完成的。所以一级部分以虚线分别和飞控机、地面控制计算机连接。具体则情况需要根据实际的分析对象确定。
这个控制系统模型相比之前的模型有很大的改进。首先,它贴近工程,可根据实际分析对象对相关的仪器设备进行增减。甚至于未来技术发展,运载器的控制系统只要还是敏感器、控制器、执行机构这样的基本结构,那么就可以根据实际对上述模型进行微调;第二,可以体现运载器的级数,而且在运载器级间分离后依然可以保证模型的完整。比如,一级分离后就可以将图中一级部分截掉保留二级到末级部分,不影响模型的完整性;第三,系统结构明晰,不会出现之前模型中功能的重叠。并且能将各个仪器和其在控制系统中的具体作用联系起来,方便分析仪器设备功能及其测试需求。
3 模型的实用性分析
运载器从单个组成仪器完成制造到整体交付使用,控制系统所需要完成的测试有单元测试(对组成设备单元进行的功能检查和性能测试)和综合测试(对运载器飞行控制系统或与其有关系统进行的功能检查和性能测试)两类,综合测试又分为单项测试、分系统测试和总检查[1]。综合测试在运载器全寿命周期里进行的次数最多,所以在进行运载器的测试需求分析时,通常把综合测试内容作为主要分析对象。
在图9中需要测试的控制系统设备有:信息探测装置、惯性器件、辅助导航设备、飞控机、伺服机构、电池、配电控制、火工品安全保护及点火、发动机安全保护及点火。运载对象独立于控制系统,实际工程中对运载对象的测试要求通常由运载对象研制部门提出,测试要求中包括与控制系统的接口信号及响应,故不作讨论。
综合测试遵循着从运载器上不加电到加电,从点到面的测试顺序。前面从模型直接得出的项目都可以认为是“点”,完成“点”的测试后,就要测试整个控制系统。从图9中可以看出,控制系统的功能是根据敏感器测量的数据,由飞控机结合飞控程序和装订好的数据完成运载器的姿态、飞行轨道、点火、级间分离的控制。为了保证控制系统能够完成这样的任务,那么就要测试以下几个项目:第一,系统的综合零位;第二,各个通路特性及其极性;第三,验证点火和关机方程的精度。
综上所述,可以对运载器的测试项目按照测试顺序进行排列。不加电的测试有:火工品通路、保险栓开/闭、脱落连接器脱落、伺服机构气压或油面。加电的测试按照由点到面的顺序排列有:电池配电控制、惯性器件、辅助导航设备、飞控机、伺服机构回路、系统的综合零位、各个通路特性及其极性、点火和关机方程的精度。其中不加电测试就是综合测试中的单项测试,而上面所列的加电测试则属于分系统部分。以上就是通过工程化模型得到的简要结论,这是综合测试的一个基本框架,更深层的结论可以按照这个框架填补内容。和实际对比后,发现二者在同层次的测试项目上基本是一致的[1,5,6],这说明模型是可用的、有效的。
4 结论
为了解决使用现有模型在测试需求分析时遇到的困难,本文根据模型的缺点和不足,分析需要改进的要点。以运载器控制系统理论模型为起点,提出了控制系统物化模型和实用化模型,并且结合工程实际得到了工程化模型。其次,借助工程化模型对运载器的控制系统测试需求进行了简要的分析,所得结论和实际测试项目基本一致。再结合工程化模型结构便于根据实际对象增添设备的特点,证明工程化模型对测试需求分析较有帮助。
[1] 沈秀存. 导弹测试发控系统[M]. 北京:中国宇航出版社, 1996.
[2] 张学英,易 航,汪 洋,等. 运载火箭测发控系统通用化设计[J]. 导弹与航天运载技术,2012(4): 15-19.
[3] 宋征宇. 新一代航天运输系统测发控技术发展的方向[J]. 航天控制,2013,31(4): 3-9.
[4] 陈世年. 控制系统设计[M]. 北京:中国宇航出版社, 1996.
[5] 胡昌华,马清亮,郑建飞. 导弹测试与发射控制技术[M]. 北京:国防工业出版社, 2010.
[6] 薛成位. 弹道导弹工程[M]. 北京:中国宇航出版社,2002.
Application of a Control System Model for Testing Requirements Analysis of Launch Vehicle
Li Yuechen1,2, Wang Zhiya1, Hu Weijian1
(1.Beijing Institute of Control and Electronics Technology,Beijing 100038,China;2.Second Academy, CASIC, Beijing 100854,China)
Based on the background of launch vehicle control system test, regard the problem that existing control system model is not convenient to analyze the testing requirements. According to the actual launch vehicle control system, improve the theoretical model of control system and get the industrialization model of launch vehicle control system. The validated results indicate that testing requirements concluded by the industrialization model and actual test projects are basically the same, the improved model is practicable and effective.
launch vehicle; testing requirements analysis; industrialization model
2016-04-07;
2016-05-24。
李悦辰(1991-),男,陕西西安人,硕士研究生,主要从事自动控制与自动化测试方向的研究。
1671-4598(2016)09-0077-03
10.16526/j.cnki.11-4762/tp.2016.09.021
TP3
A
