基于逻辑门限值的客车ABS硬件在环测试研究
2016-11-17徐博文吴佳伟
陆 艺,徐博文,吴佳伟,赵 静
(1.中国计量学院 计量测试工程学院,杭州 310018;2.杭州沃镭智能科技股份有限公司,杭州 310018)
基于逻辑门限值的客车ABS硬件在环测试研究
陆 艺1,徐博文1,吴佳伟1,赵 静2
(1.中国计量学院 计量测试工程学院,杭州 310018;2.杭州沃镭智能科技股份有限公司,杭州 310018)
针对ABS控制器开发过程中纯数值仿真过于理想化,实车试验成本高、周期长等缺点,设计并搭建了客车ABS硬件在环仿真测试系统;系统由xPC目标实时仿真环境、气制动系统及整车动力学模型组成;气制动系统按照真实客车制动系统并配合力传感器搭建;整车动力学模型由轮胎模型、七自由度车辆模型、制动器模型等组成,并利用Simulink建模;在ABS控制策略中引入逻辑门限值控制,在客车ABS硬件在环仿真测试系统上测试了客车在高附着系数、低附着系数及对接路面上的制动情况;试验表明:逻辑门限值控制能很好地将车轮滑移率控制在最佳滑移率附近,具有较好的控制精度及鲁棒性。
逻辑门限值;硬件在环;制动防抱死
0 引言
ABS(anti-lock brake system)能使车轮在制动过程中始终处于非抱死状态,避免制动过程中前轮抱死造成丧失转向能力以及后轮抱死导致的车辆侧滑甩尾,已成为评价汽车制动安全性的重要指标。目前国内外针对客车ABS控制方法的研究主要停留在纯数值仿真,鲜有硬件在环仿真的研究数据;针对汽车硬件在环的研究主要集中在偏航稳定性、汽车稳定性等方面,针对客车ABS制动系统研究仍比较匮乏,对实际客车ABS的研究开发缺少借鉴价值[1-4]。由此设计了一种逻辑门限值控制方法对客车制动过程进行仿真测试。基于国家标准GB7258-2012《机动车运行安全技术条件》[5]、GB12676-1999《汽车制动系结构、性能、和试验方法》[6],设计气制动回路,利用Matlab/xPC搭建客车ABS硬件在环测试系统,对客车ABS直线制动进行了仿真测试。
1 客车ABS制动硬件在环测试系统设计
根据客车ABS制动要求搭建客车ABS系统硬件在环测试系统,其包括xPC目标实时环境、气制动系统和整车动力学模型三部分,其系统原理如图1所示。其中xPC目标实时环境采用了“双机”模式,即宿主机和目标机[7]。宿主机上安装有Simulink用来整车动力学模型,目标机用于执行生成的模型代码,宿主机和目标机通过TCP/IP连接通讯。目标机上安装有数据采集卡和运动控制卡。数据采集卡采用研华PCI-1711,A/D分辨率为12位,采样速率为1 kHz。运动控制卡能控制伺服电机实现快速、慢速等多种运动方式,来模拟驾驶员踩踏板制动的过程。气制动系统按照真实客车制动系统搭建,并在每个制动气室上安装力传感器,结构如图2所示。在ABS调节器的进气口和出气口,分别有进气阀、出气阀两个高速电磁阀,根据开闭状态不同可实现增压、保压、减压3种不同的工作状态。高速电磁阀采用TLE6228芯片驱动[8]。
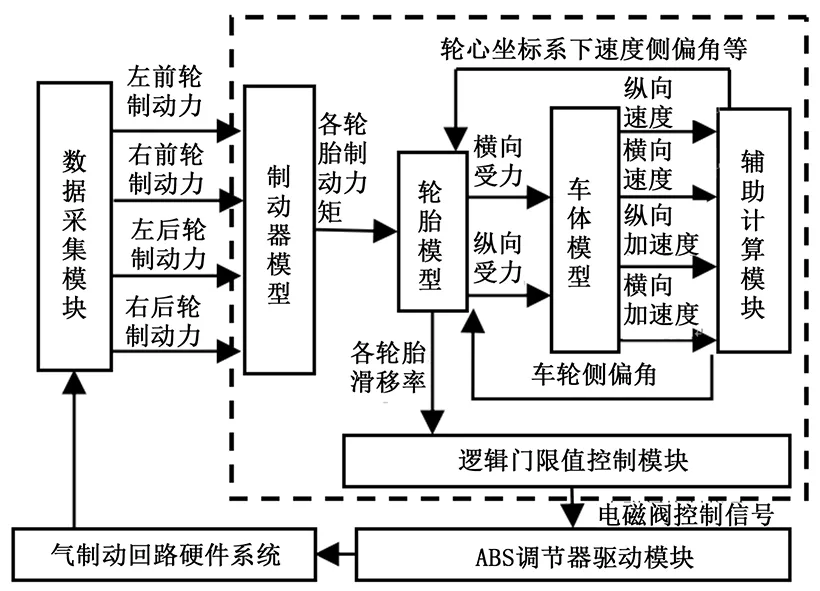
图1 客车ABS硬件在环测试系统示意图
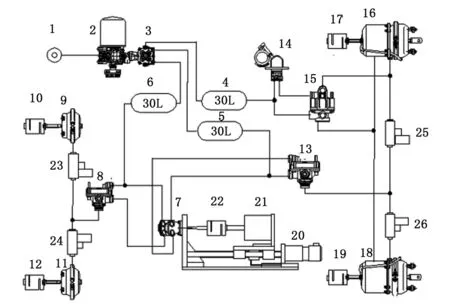
图2 气制动系统硬件组成1—气源,2—空气干燥器,3—四回路阀,4、5、6—储气罐,7—制动总阀,8—前桥继动阀,9、11—膜片制动气室,13—后桥继动阀,14—手制动阀,15—差动继动阀,16、18—后桥弹簧制动缸,20—伺服电机,21—快速气缸, 10、12、17、19、22—力传感器,23、24、25、26—ABS调节器
整车动力学模型由轮胎模型、七自由度车辆模型、辅助计算模型等组成,结构如图1中虚线框内部分所示。轮胎模型选用GIM轮胎模型。该模型将车轮与地面的接触面分为粘着域(0~ε)和滑动域(ε~l)两部分。粘着域中的附着力由轮胎表面的切线弹性力决定;滑动域中的附着力由滑动摩擦应力决定,由此整个轮胎接地面的纵向附着力表达式为:
(1)
(2)
其中:Fx为各个车轮的纵向力(N),Fy为各个车轮的侧向力(N),Cs为车轮纵向刚度(N/m3),Ca为车轮横向刚度(N/m3),ss为车轮纵向滑移率,sa为车轮横向滑移率,ssc为车轮纵向临界滑移率,sac为车轮横向临界滑移率,μx为轮胎纵向附着系数,μy为轮胎横向附着系数,ln为轮胎接地线长度的无量纲值定义为ln=ε /l。
七自由度车辆模型包括车身的纵向、侧向、横摆自由度以及4个车轮的旋转自由度,其在纵向、横向、横摆自由度上的平衡计算公式如下:
(3)
(4)
(5)
其中:Iz为汽车绕相对坐标轴z轴的转动惯量(kg/m2),u为车辆纵向车速(m/s),v为车辆横向车速(m/s),γ为车辆横摆角速度(rad/s),Mz为横摆力矩(N·m),M为整车质量(kg)。
制动器模型选取了领从蹄式鼓式制动器,其是气制动系统硬件和仿真模型的连接部分,表现为制动气室输出力和制动器输出力矩的关系,数学公式为:
(6)
其中:η为制动器效率系数,κ制动器效能因素,F为制动气室输出力(N),R为轮胎半径(m)。
利用Simulink建立整车动力学仿真模型,如图3所示。
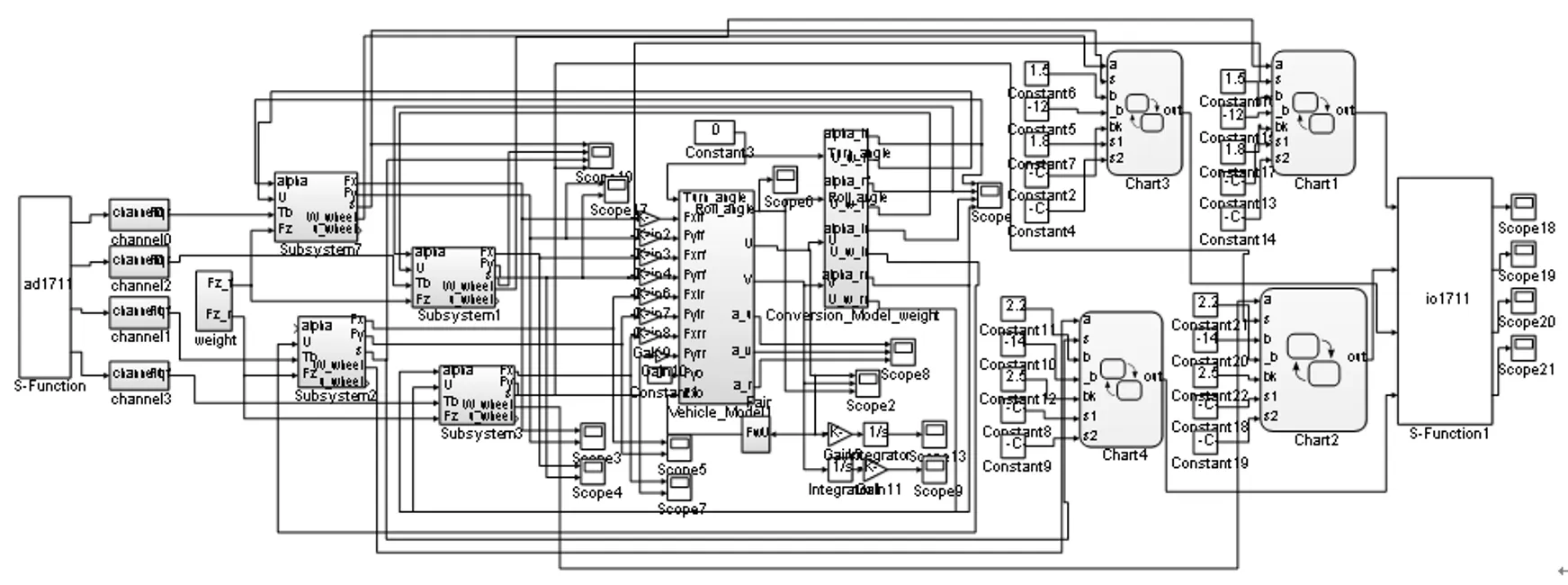
图3 整车动力学Simulink仿真程序图
2 不同路面逻辑门限值控制算法分析
逻辑门限值控制采用车轮角加速度为主要门限,车轮滑移率为辅助门限。每个ABS控制循环中包括增压、减压、保压、阶梯增压和阶梯减压5种状态。下面介绍在不同路面上的控制方法。
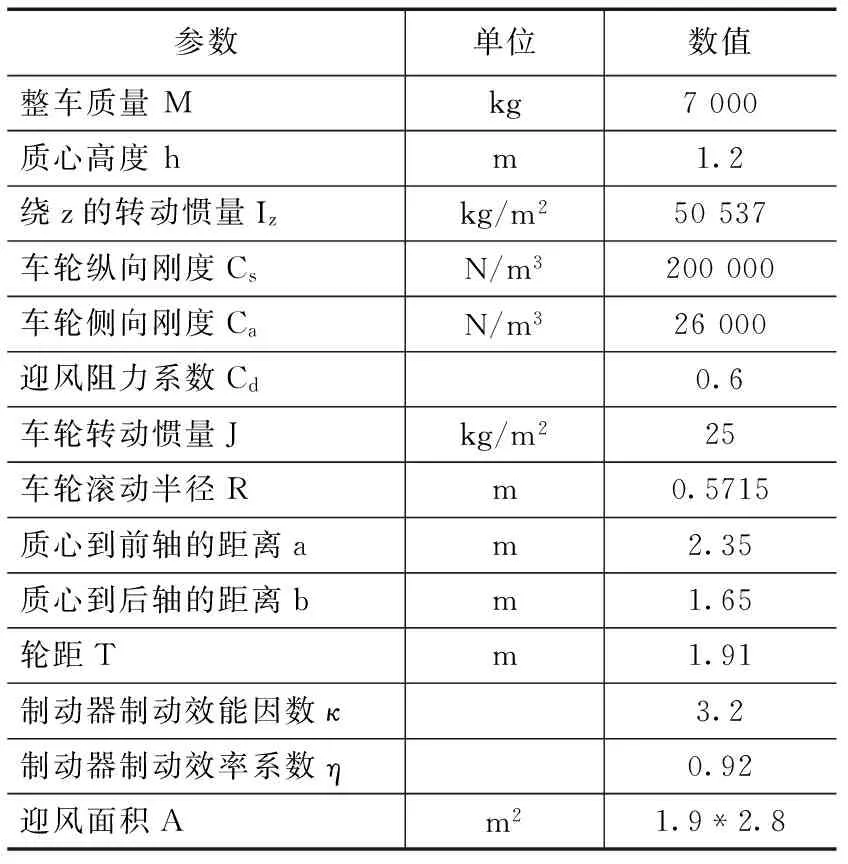
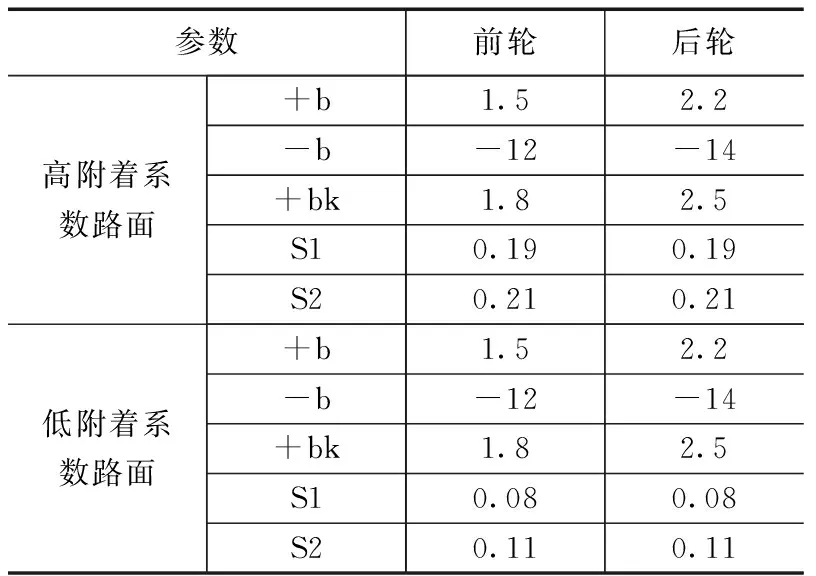
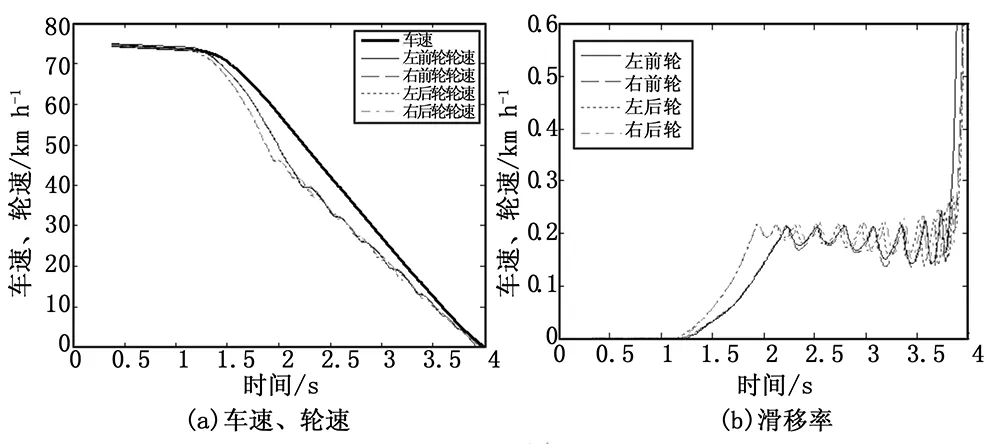
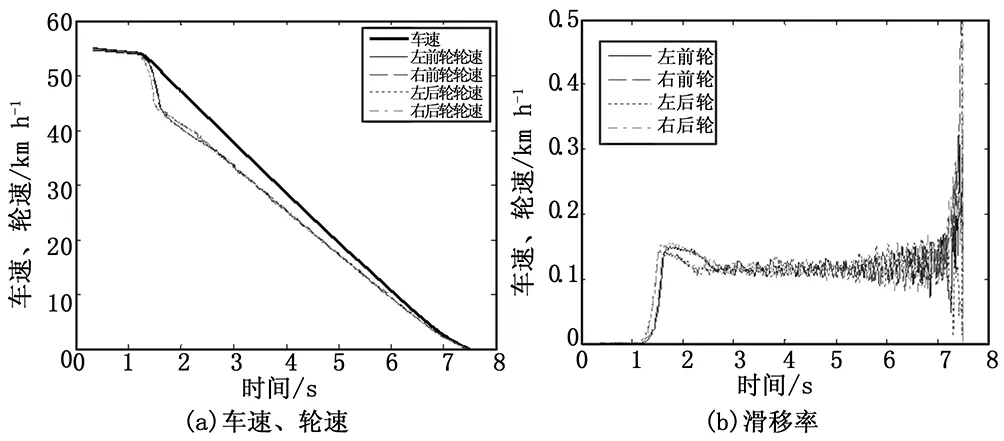
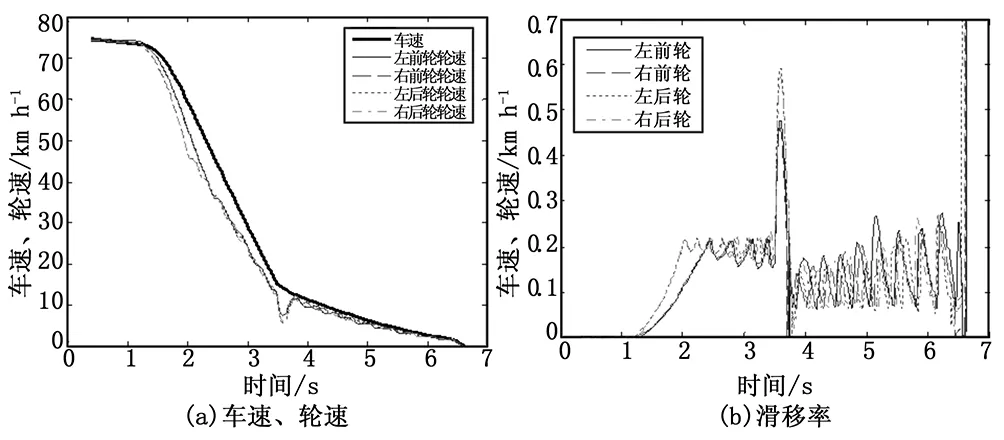
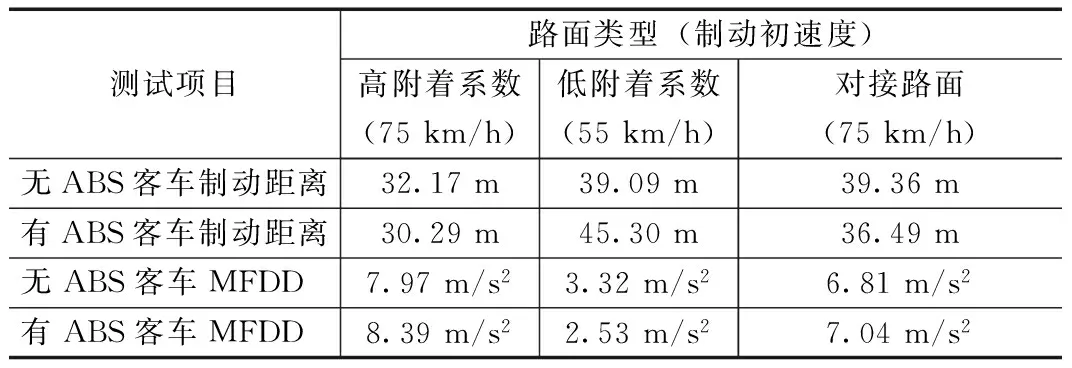
在高附着系数路面上时,当车辆紧急制动,制动系统压力迅速增加,轮速快速下降,当加速度a下降至加速度下门限值-b时,判断车轮滑移率s与滑移率上门限值s2的关系,若s>s2,则进入减压状态,否则继续保持增压状态。由于减压,车轮角加速度开始回升,当减速度大于-b门限值时,进入保压状态。此时,由于制动系统的惯性和制动气室所保持的压力,车轮减速度会继续回升。此时可设第二加速度上门限值+bk,当车轮角加速度超过上门限值+b时,比较车轮滑移率s与滑移率下门限值s1,若s 在低附着路面上,开始制动时,制动系统压力迅速增加,轮速快速下降,当加速度a下降至加速度下门限值-b,且车轮滑移率s>s2时,进入阶梯减压状态。由于减压,车轮角加速度开始回升,当角加速度高于+b门限值时,判断车轮滑移率s的大小,若s 对接路面即路面系数由高附着系数跃变到低附着系数的路面。要实现对接路面的ABS的控制,其重点在于在制动过程中快速地识别出路面附着系数的跃变并迅速将控制算法从高附着系数路面控制算法切换到低附着系数路面控制算法。而高低附着系数路面的识别,关键在于在给定的保压时间内,车轮加速度能不能超过阈值+b,若超过,则认为是高附着系数路面,否则识别为低附着系数路面。 图4 控制方法流程图 利用客车ABS硬件在环测试系统对客车直线制动进行仿真测试,测试时保持制动系统管路压力在0.7 MPa,高附着系数路面的滚动附着系数为0.84,滑动附着系数为0.75,低附着系数路面的滚动附着系数为0.3,滑动附着系数为0.22。仿真试验的ABS客车参数如表1,逻辑门限控制参数如表2。 根据GB7258-2012对客车制动效能的规定,对客车制动的制动距离、制动减速度等进行测试,制动减速度计算公式为: (7) 其中:MFDD为充分发出的平均减速度;v0为试验车辆制动初速度;vb为0.8 v0;ve为0.1 v0;sb为试验车速从v0到vb之间行驶的距离;se为试验车速从v0到ve之间行驶的距离. 表1 ABS客车仿真参数 引入附着系数利用率ε作为评判一个制动防抱死系统是否满足安全要求的指标,它的定义为防抱死装置工作时的最大制动因数(ZAL)与附着系数(KM)之比,即: (8) 表2 逻辑门限控制参数 式中,KM即为仿真模型中设置的路面附着系数;ZAL的计算方法为让车辆以不低于55 km/h的初速度开始制动,测定车速从45 km/h降低到15 km/h所需的时间,取测试3次的平均值tm,计算最大制动因数ZAL (9) 若制动防抱死系统满足ε>0.75,则应认为它是满足安全要求的。ε应在附着系数小于或等于0.3和大于或等于0.8的路面上测取。 3.1 高附着系数路面测试结果及分析 测试从紧急踩下制动踏板开始,直至ABS停止工作,客车制动停车为止。图5为测试结果。从图中可以看出,车辆在1.2 s时开始制动,在3.9 s时制动停止。制动开始后后轮的滑移率增加先于前轮,这是由于后轮制动力矩大于前轮制动力矩。在ABS的作用下,4个车轮都没有发生抱死现象,滑移率维持在高附着系数路面的最佳滑移率0.2附近。车辆制动距离为30.29 m,无跑偏现象发生。根据式(7)计算可得MFDD为8.39 m/s2,根据式(8)可得附着系数利用率ε为98.97%,远远大于75%的要求。ABS控制策略效果较好。 图5 高附着系数路面测试结果 3.2 低附着系数路面测试结果及分析 低附着系数路面制动测试结果见图6。车辆在低附着系数路面上的制动时间比高附着 系数路面更长。1.2 s时开始制动,7.5 s时制动结束,历时6.3 s。制动开始后,车轮滑移率快速上升至0.15左右,然后维持在低附着系数路面的最佳滑移率0.1附近。相比高附着系数路面,低附着系数路面的滑移率曲线振荡频率更高。因为路面附着系数低,车轮与路面的作用力减小,很小的制动力即能改变车轮轮速。测试制动距离为45.30 m,制动过程中无车轮抱死、跑偏现象发生。根据式(7)计算可得MFDD为2.53 m/s2,根据式(8)可得附着系数利用率ε为96.17%,完全满足安全要求。ABS控制策略制动效果良好。 图6 低附着系数路面测试结果 3.3 对接路面测试结果及分析 对接路面试验进行了从高附着到低附着路面的试验。在3.5 s时由高附着路面进入低附着路面,试验结果如图7所示。从图中可以看出,整个制动过程历时5.4 s,从制动开始到3.5 s车辆在高附着系数路面上,车辆减速度较大,车速降低较快,滑移率振荡较小;在3.5 s时,路面系数突然由高变低,此时由于制动力矩调整的滞后,车轮滑移率迅速由0.2左右攀升至0.8左右。为避免车轮抱死,根据逻辑门限值控制策略迅速调节各个车轮的制动力矩来适应不同的路面附着系数,经过约0.2 s的调整,迅速将滑移率控制在0.1左右。整个过程中各车轮没有发生抱死,进入低附着系数路面后滑移率曲线振荡幅度较大。制动距离为36.49 m,无跑偏现象,根据式(7)计算可得MFDD为7.04 m/s2。从整个制动过程来看,车辆对路面附着系数突变响应迅速,ABS控制策略制动效果较好。 图7 对接路面测试结果 3.4 与无ABS客车制动效能测试结果对比及分析 为了测试制动效能,在同样的路面附着系数和制动初速度条件下对无ABS客车的制动距离和充分发出的平均减速度(MFDD)进行了试验,其试验结果与有ABS客车对比如下: 表3 无ABS客车与有ABS客车制动效能对比 从表3中可以发现,在高附着、对接路面上有ABS客车在制动距离和MFDD上的表现都优于无ABS客车,说明有ABS客车的制动效能更好。相反地,在低附着系数路面上,有ABS客车的却比无ABS客车差,这是由于当车轮与地面之间的附着力较小时更容易发生车轮抱死现象,从而导致丧失转向能力、侧滑甩尾等现象发生,有ABS客车为了杜绝上述现象的发生而牺牲了制动效能。总体而言,逻辑门限值控制方法在紧急制动中对提高客车被动安全性具有明显作用,客车ABS制动硬件在环测试系统对ABS控制方法研究开发具有重要意义。 本文根据ABS制动要求设计了逻辑门限值控制控制方法,并在搭建的客车ABS制动硬件在环仿真测试系统上进行了制动测试。由于不同的路面条件对逻辑门限值的要求也不尽相同,由此设计了3种不同的、分别适合高附着系数路面、低附着系数路面及对接路面的控制方法,并进行了硬件在环测试。试验结果表明,逻辑门限值控制能很好地控制车轮滑移率,防止车轮抱死造成的种种危险状况,并在一定程度上减小制动距离,具有良好的控制精度及鲁棒性。由此可见,逻辑门限值控制方法对于客车ABS制动是可行的,试验结果对于ABS控制策略的研究具有重大意义。 [1] 蒋 强,罗 宏. 基于xPC的气压ABS调节器动态参数测控系统开发[J]. 计算机测量与控制,2012,20(7):1787-1789. [2]李幼德, 刘 巍, 李 静, 等. 汽车稳定性控制系统硬件在环仿真[J]. 吉林大学学报(工学版), 2007, 37(4): 737-740. [3]Gawthrop P J, Virden D W, Neild SA, et al. Emulator-based control for actuator-based hardware-in-the-loop testing [J]. Control Engineering Practice, 2008, 16(12):897-908. [4]Guvenc B A, Karaman S. Robust Yaw Stability Controller Design and Hardware-in-the-Loop Testing for a Road Vehicle[J]. Vehicular Technology, IEEE Transactions, 2009, 58(2): 555-571. [5]GB7258-2012《机动车运行安全技术条件》[S]. 中国国家标准化管理委员会,2012. [6]GB12676-1999《汽车制动系结构、性能和试验方法》[S]. 中国国家标准化管理委员会,1999. [7]杨 涤,李立涛,杨 旭,等. 系统实时仿真开发环境与应用[M]. 北京:清华大学出版社,2002:249-252. [8]蔡源春, 周云山, 张飞铁,等. 基于硬件在环仿真技术的无级变速器试验系统研究[J]. 仪器仪表学报, 2009, 30(5):960~966. [9]杨武双,钟 勇. 基于综合控制策略的ABS仿真研究[J]. 福建工程学院学报,2008,6(1):38-42. Research on Hardware-In-the-Loop Test of Bus ABS Based on Logic Threshold Lu Yi1, Xu Bowen1, Wu Jiawei1, Zhao Jing2 (1. College of Metrology & Measurement Engineering, China Jiliang University, Hangzhou 310018, China 2. Hangzhou Wolei Intelligent Technology Co.,Ltd., Hangzhou 310018, China) In the development process of ABS controller, the pure numerical simulation is too ideal, the cost of real vehicle test is high and the cycle is long, so the bus ABS hardware-in-the-loop simulation test system is designed and built. The system is composed of xPC target real-time simulation environment, air brake system and vehicle dynamics model. The air brake system is built according to the real bus brake system. In addition, there are four force sensors. The vehicle dynamics model is composed of tire model, seven degrees of freedom vehicle model, arrester model and so on. And the simulation model was built by using Simulink. In the ABS control strategy, the logic threshold control is introduced. The brake tests at high adhesion coefficient road, low adhesion coefficient road and joint road were done on Bus ABS hardware-in-the-loop simulation test system. The results show that the logic threshold control can control the wheel slip ratio near optimal slip ratio. It has good control accuracy and robustness. logic threshold; hardware-in-the-loop; ABS 2016-03-24; 2016-04-25。 国家质检总局公益性行业科研专项项目(201310284);浙江省科技计划项目(2014C31105)。 陆 艺(1979-),男,江苏扬州人,副教授,硕士研究生导师,主要从事精密测试方向的研究。 徐博文(1990-),男,浙江宁波人,硕士研究生,主要从事精密测试方向的研究。 1671-4598(2016)09-0050-04 10.16526/j.cnki.11-4762/tp.2016.09.014 U461.6 A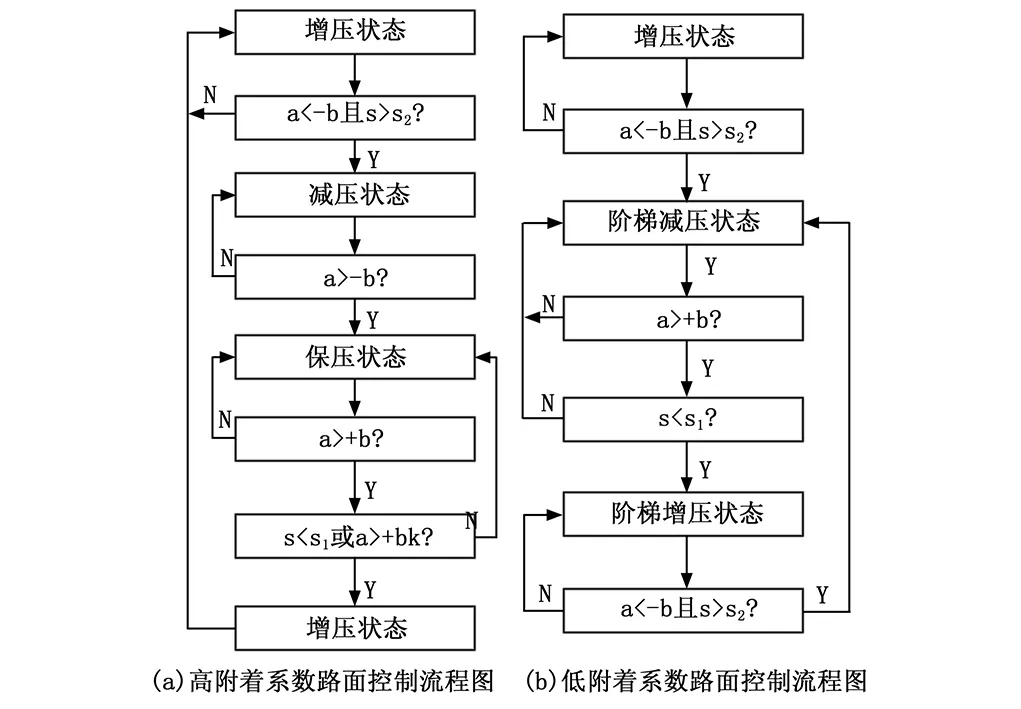
3 硬件在环仿真测试结果及分析
4 结论
