异常环境下GNSS接收机性能测试平台开发
2016-11-17孙淑光王天游马文利
孙淑光,王天游,马文利,程 鹏
(中国民航大学电子信息与自动化学院,天津 300300)
异常环境下GNSS接收机性能测试平台开发
孙淑光,王天游,马文利,程 鹏
(中国民航大学电子信息与自动化学院,天津 300300)
为了验证全球导航卫星系统(GNSS)接收机在电离层异常环境下的性能是否满足相应的技术规范要求,文章设计开发了GNSS接收机性能测试平台;该平台主要由信号仿真器、轨迹发生器、误差仿真模块、待测接收机以及性能测试模块组成,可以仿真不同电离层环境下的卫星信号,从而测定接收机在不同环境下的性能;详细介绍了误差仿真模块与测试模块的设计方案,并利用信号仿真器与接收机进行测试验证,证明了该平台的有效性。
接收机性能;电离层误差;接收机自主完好性
0 引言
随着GNSS的发展,导航用户定位精度不断提高,其在民用航空领域的应用也越来越广泛。而机载导航接收机的性能对民航安全有着至关重要的作用。影响定位接收机性能的因素有很多,包括卫星信号误差、传播路径误差以及接收机自身因素造成的误差等,其中,传播路径误差中以电离层误差最难预测,异常环境下电离层扰动如地震、核爆炸以及强烈的太阳、地磁活动等都会对电磁波的传播产生严重影响,如何精确地测定接收机在这些异常扰动下的性能显得尤为重要。
本文利用轨迹发生器、信号发生器、电离层误差设置模块、待测接收机以及性能测试模块组成测试平台,为GNSS接收机的定位精度和接收机自主完好性监测(RAIM)等性能评估提供验证平台。
1 平台整体设计
测试平台主要由轨迹发生器、标准信号发生器、误差环境设置模块、待测接收机以及性能测试模块组成,其组成框图如图1所示。
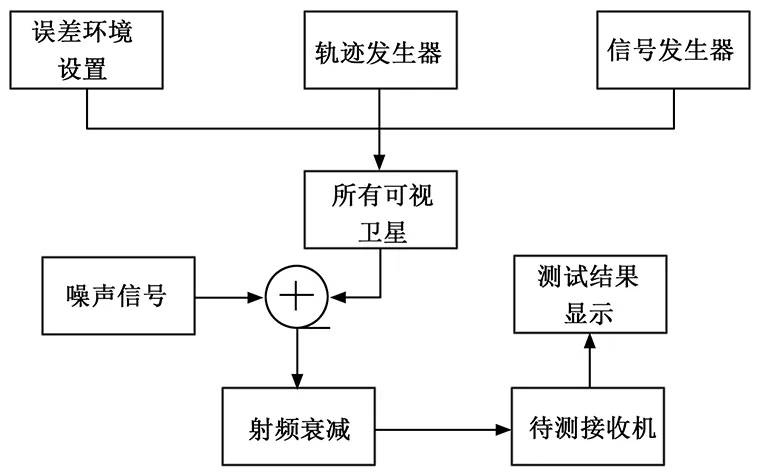
图1 GNSS接收机性能测试平台整体设计
首先,信号发生器根据轨迹发生器的设置生成标准GPS信号。
然后,通过误差环境设置模块设置电离层误差,将误差延迟加入到标准GPS信号中生成带误差延迟的GPS信号,设置不同的电离层误差可以为接收机测试提供不同的电离层环境,从而测定接收机在不同环境下的性能。
最后,测试模块接收待测接收机输出数据,并将输出结果标准数据进行对比验证接收机在不同环境下的定位精度与RAIM。
国际民航组织在的不同飞行阶段对接收机的性能要求如表1所示[1]。
2 误差环境设置
2.1 电离层误差模型
本文从ftp://cddis.gsfc.nasa.gov/gps/products/ionex/下载了1998~2015年的IONEX[2]格式的格网电离层数据,将其作为数据库,制作了基于MATLAB-GUI的总电子密度含

表1 民航飞机对机载接收机的性能要求
量(TEC)数据处理软件。软件界面如图2所示,其可以实现以下几种功能:
1)任一位置点、任一时刻的TEC值
2)任一天的TEC日变化曲线;
3)99~14年之间任一年的TEC变化曲线;
4)任一经度处TEC随纬度变化曲线;
5)任一纬度处TEC随经度变化曲线;
6)TEC在99~14年之间的变化曲线;
通过该软件可以观察TEC随地方时、季节、经、纬度和年份的变化曲线,也可以观察出异常扰动期间TEC变化,从而确定异常扰动发生时刻以及持续时间。
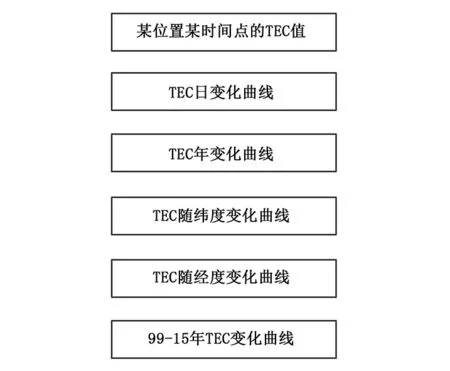
图2 TEC数据处理软件
而且,利用这些数据通过内插算法[3-4]即可求得任意时刻t任意位置(β,λ)处的天顶方向TEC(VTEC)值。求得VTEC后通过映射函数求得倾斜方向TEC(STEC)。计算公式如下[5]:
(1)

电离层时延计算公式为:
(2)
其中:c为光速,f为载波频率。
2.2 电离层误差环境的设置
测试中所设置的异常电离层环境包括地震、磁暴、放射性污染等[6]。
2.2.1 地震
本文研究了2000年以来几个7.0级以上的地震,由于篇幅所限不再详细列出,仅以2008年5月12日四川汶川(31.0°N,103.4°E)8.0级地震和2011年3月11日日本9.0级地震(38.1°N,142.6°E)为例。图3为其TEC变化曲线图。
由几次地震期间VTEC变化情况可以看出:在地震发生前前的某段时间内VTEC出现迅速降低的情况,如图3(a)中5月9日的10:00~14:00段以及图3(b)中3月3日、5日的04:00~10:00段,这极有可能是由于地震引起的,这与利用其它方法分析得出的结论一致[7-8],因此可以将该段时间视为地震引起的电离层异常情况,利用2.1节中的TEC数据处理软件仿真产生该段时间的电离层误差延时。
2.2.2 磁暴
以2004年11月9日和2006年12月15日发生的电磁爆为例进行研究,其VTEC变化情况分别如图4(a)和4(b)所示。
由图(a)可以看出14日14:00至15日08:00时间段内VTEC出现剧烈震荡,由图(b)可以看出7日20:00至8日6:00以及9日18:00至10日04:00时间段内VTEC出现震荡,这与磁暴期间磁暴环电流指数(Dst)逐日变化情况一致[9],因此可以利用2.1节中的TEC数据处理软件仿真产生该段时间的电离层时延误差。
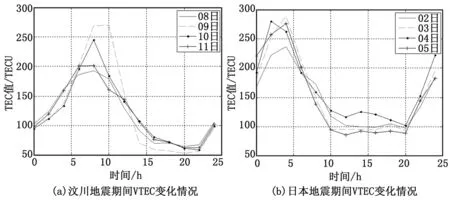
图3 地震期间VTEC变化情况
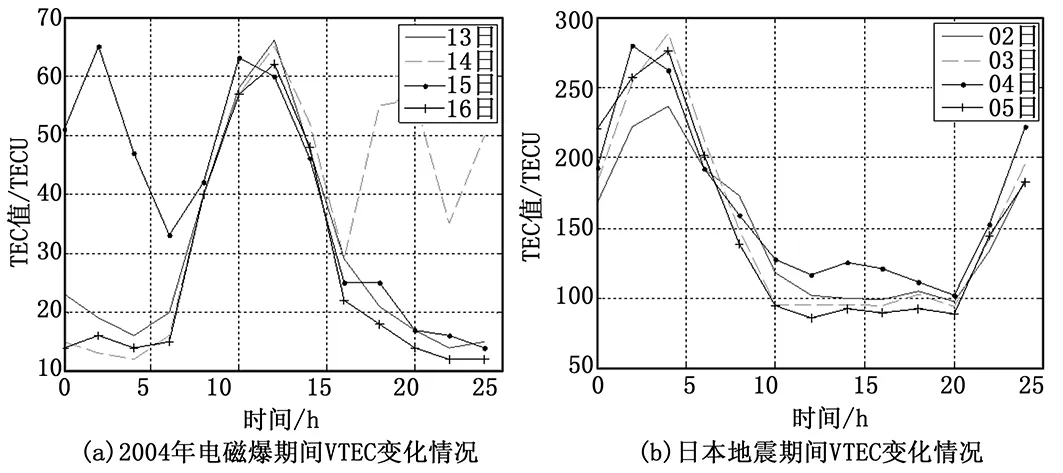
图4 磁暴期间TEC变化情况
2.2.3 放射性污染
2013年2月12日,朝鲜在北部地下核试验场成功举行了第三次地下核试验,核爆炸前后11~14日内VTEC变化曲线如图5所示。
由图5可以看出:由于核爆炸的影响12日TEC值峰值后移且在02:00时刻变化率发生变化,有可能是因为核爆炸使得VTEC值减小,因此可以选择01:35:00~02:55:00作为测试时间段。

图5 核爆炸前后11~14日VTEC变化曲线
3 测试模块
接收机性能测试模块按数据处理时间先后分为参数设置模块和测试评估模块。参数设置模块包括初始化设置、数据采集和界面显示3个部分;测试评估模块包括数据处理、界面显示、评估计算和生成报表4个部分。其结构组成如图6所示。

图6 接收机性能测试软件结构组成
3.1 参数设置模块
参数设置模块主要包括4个子界面:轨迹设置界面,接收机数据采集界面,误差设置界面以及可见星相关参数显示列表。
轨迹设置部分可以根据需要设置不同的运动模型:静止和沿大圆航线飞行。
误差设置参数主要包括根据真实信息计算出的数据和接收机输出的实测数据进行比较以评估接收机性能。
数据采集模块通过串口通信对接收机数据进行实时采集。主要有:接收机的位置信息包括经、纬、高,水平保护限,告警时长,故障检测隔离标志以及实测故障卫星号。
可见星参数显示列表用来直观地显示可见星的数量、PRN号、高度角、方位角、伪距、穿刺点位置、电离层误差以及对流层误差。
3.2 测试评估模块
测试评估模块主要包括定位精度和RAIM的测试评估。
3.2.1 定位精度评估计算流程
卫星定位中通常用均方根差(root mean square error,RMS)来表示定位精度[10]。水平定位精度(Horizontal RMS,HRMS)和垂直定位精度(Vertical RMS,VRMS)的定义式如下:
(3)
式中,σE,σN,σU为分别表示东、北、天向定位标准差。
假设ti时刻,接收机测得坐标为(Xi,Yi,Zi),实际坐标为(X0,Y0,Z0),将(Xi,Yi,Zi)转换为以(X0,Y0,Z0)为站心的站心直角坐标,设转换后的坐标为(Ni,Ei,Ui),即为东、北、天3个方向的误差。根据中误差计算公式,3个方向的中误差为[11]:
(4)
将(4)带入(3)即可求得定位精度。
定位精度的评估流程图如图7所示。

图7 定位精度评估流程图
3.2.2 RAIM评估计算流程
RAIM是衡量接收机性能的一项非常重要的指标,体现了接收机故障检测与隔离(fault detection and isolation,FDI)和及时告警的能力。完好性包括告警门限、完好性风险、告警时间3个方面的要求。
告警门限:是特定场合下为保证交通运输安全而设定的定位误差上限,该数值由应用场景的特性决定;
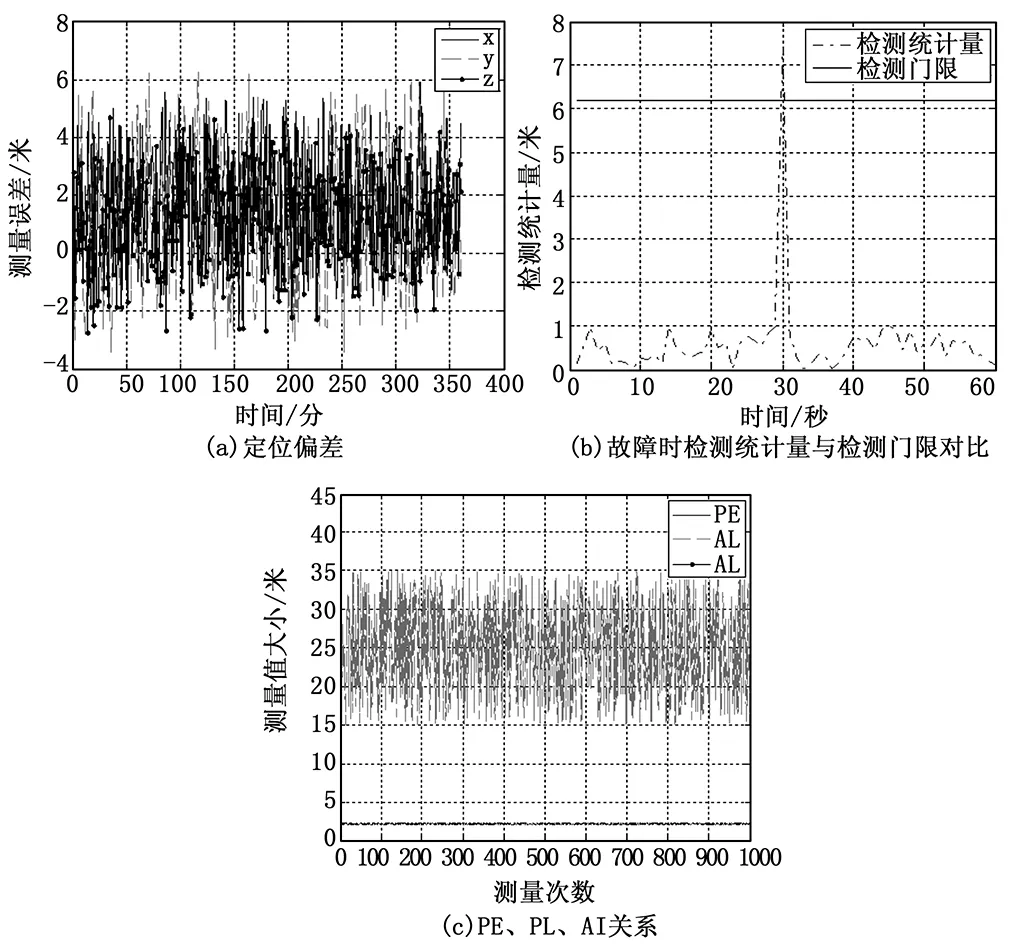
完好性风险:是指出现危险误导信息(PL(保护限)< AL(告警限) 告警时间:是指从发现危险误导信息到运载体驾驶人员获得告警信息时的时间间隔。 控制信号仿真器产生GPS信号,并将测试信号送入接收机,然后调节信号仿真器中的电离层误差生成异常环境下的GPS信号,并将接收机输出的故障检测与隔离标志以及告警时间送到测试评估平台进行评估。因为完好性风险是一个概率值,所以需要实施蒙特卡洛实验进行多次测量。 RAIM测试评估流程如图8所示。 图8 RAIM测试流程图 本文将接收机置于静止状态进行仿真验证。仿真时间为2008.5.12 9:30:00-14:30:00,采样间隔为1 s,测量次数为1*105。 测试结果如表2及图9所示。图9(a)为单次测量中实际位置与测量位置之间的偏差(每隔一分钟计算一次),图9(b)为单次测量中发生故障1 min内检测统计量与检测门限之间的对比,图9(c)为1*105次蒙特卡罗实验中PE、PL、AL关系,PL设为45,取前1 000次为例。表2和图9验证了该测试平台的有效性和可靠性。 表2 测试数据对比 图9 接收机性能测试结果 为了保证接收机在民航领域应用的安全性与可靠性,必须建立接收机的性能测试平台,尤其是异常电离层环境下的测试平台。本文设计开发了一种测试平台,该平台可以测试地震、磁暴、核爆炸等异常电离层情况下接收机的性能,并通过实验验证了该平台的有效性,为接收机的开发与应用提供了测试平台。 [1] ICAO SARPS (2004), Annex 10: International Standards and Recommended Practices:Aeronautical Telecommunications, Volume 1[S]. International Civil Aviation Organization. [2] Hernández-Pajares M, Juan J M, Sanz J, et al. The IGS VTEC maps: a reliable source of ionospheric information since 1998[J]. Journal of Geodesy, 2009, 83(3-4): 263-275. [3] Schaer S,Gurtner W,Feltens J.IONEX:The IONosphere map exchange format version 1[A].In Proceedings of the IGS AC Workshop[C].1998:233-247. [4] Code Ac Team.Global ionosphere maps produced by Code[EB/OL].(2012-07-04). ftp:ftp.unibe.ch/aiub/ionev/soura. [5] Schaer S. How to use CODE’s global ionosphere maps[J]. Astronomical Institute, University of Berne, 1997: 1-9. [6] Pulinets S A, Liu J Y. Ionospheric variability unrelated to solar and geomagnetic activity[J].Advances in Space Research.2004(34):1926-1933. [7] 徐 彤.中低纬电离层电离层模型及其异常现象相关研究[D].西安:西安电子科技大学,2009. [8] 陈必焰,戴吾蛟,蔡昌盛,等.利用电离层层析技术探测日本9.0级地震前电离层异常[J]. 大地测量与地球动力学,2011,31(6):11-14. [9] 姚宜斌,陈家君,陈 鹏,等.2003-2006年磁暴期间欧洲区域电离层三维层析及演变分析[J].武汉大学学报,2014,39(2):132-136. [10] 刘基余.GPS卫星导航的精度,误差与偏差[J].导航,1998(4):32-35. [11] 陈 雷,孙付平,李海峰,等.跟踪环路误差对卫星导航伪距测量精度影响的评定[J].海洋测绘,2008,28(5):35-38. Performance Test Platform Development of GNSS Receiver under Abnormal Conditions Sun Shuguang, Wang Tianyou,Ma Wenli,Cheng Peng (School of Electronic Information and Automation ,Civil Aviation University of China,Tianjin 300300,China) In order to verify the receiver performance whether meet the requirements of the corresponding technical specification,especially in the Abnormal ionosphere environment,it developed a GNSS receiver performance test platform.The platform was mainly composed of signal simulator, error simulation module, the receiver under test and performance test module,it could simulate signals under different ionosphere environment to verify the receiver performance.It introduced the error simulation module and the performance test module in detail,and use them to prove the effectiveness of the platform. receiver performance;ionosphere error; receiver autonomous integrity monitoring 2016-03-11; 2016-04-18。 中国民航局安全能力建设项目(AADSA0007)。 孙淑光(1970-),女,山东人,教授,硕士,主要从事民航导航新技术、机载电子系统故障诊断方向的研究。 1671-4598(2016)09-0039-04 10.16526/j.cnki.11-4762/tp.2016.09.011 TP212.9 A
4 测试结果验证

5 结论
