RCS测量标校中采用无人机吊放标准球的解决方案研究
2016-11-17孙保杰
孙 军,孙保杰
(解放军91404部队,秦皇岛 066001)
RCS测量标校中采用无人机吊放标准球的解决方案研究
孙 军,孙保杰
(解放军91404部队,秦皇岛 066001)
研究设计了采用无人机吊放金属标准球进行雷达截面(RCS)标校的方案,旨在解决目前RCS测量中采用气球或风筝吊放方式受天气影响等标校成功率不高的瓶颈问题。设计方案在相关飞行性能评估平台进行了测试验证,结果表明能满足RCS测量中标校的需求。
无人机;雷达截面;测量标校
0 引 言
雷达截面(RCS)测量原理是金属标准球[1]定标比测法,即对于性能稳定的雷达,首先用标准球标定出其性能参数。由雷达方程:
(1)
式中:Pr为接收机输出功率;Pt为发射机功率;G为天线增益;λ为波长;σ为RCS;R为被测目标距离;L为雷达系统损耗;F为天线方向图传播因子;α为大气衰减因子。
将式(1)中相对不变的各参数用系数K来表示,即:
(2)
称K为雷达性能参数(标校系数),则式(1)的雷达方程可简化为:
(3)
在用金属标准球标定时,将测得的Pts、Prs、Rs和已知的σs代替式(3)中的Pt、Pr、R和σ,可算出雷达性能参数(标校系数):
(4)
式中:Pts为测标准球时的发射机功率;Prs为测标准球时接收机输出功率;Rs为标准球距离;σs为标准球的RCS。
在对目标进行RCS测量时,用测得的Ptt、Prt、Rt和标定出的K值(同频率极化)代入式(3),即可算得目标的RCS值:
(5)
式中:σt为目标的RCS;Ptt为测目标时发射机功率;Prt为测目标时接收机输出功率;Rt为被测目标距离。
1 RCS测量标校过程
RCS测量需要先标校再测量[2]。标校即对于性能稳定的雷达,首先标定出其性能参数K值(雷达方程中相对不变的参量)。K值的有效性通过检查标校曲线是否落在允许的范围内(如相对标准球截面积[1]偏差小于1 dB(均方差),如图1所示)来确定。测量时,用标定好的K值(与测量时同频率同极化)代入,计算被测目标的RCS值,这就要求代入计算的K值与测量时的实际K值基本一致,即K值偏差在允许的范围内,同样需要标校来确认,
即通过测量后再标校1次,与测量时所用标校K值比较或通过8 h连续标校的稳定性考核来检验测量时K值的有效性。8 h精度考核试验如表1所示。表1中,测量起始时间:18:14:10.633;每隔0.5 h标1次,有效标校××次;距离(km):1.52~1.536;方位(°):56.43~56.93;仰角(°):11.69~12.31。可见,从测量按原理实施及确保测量有效性上,都需要标校,它是测量顺利开展并有效完成的关键环节。
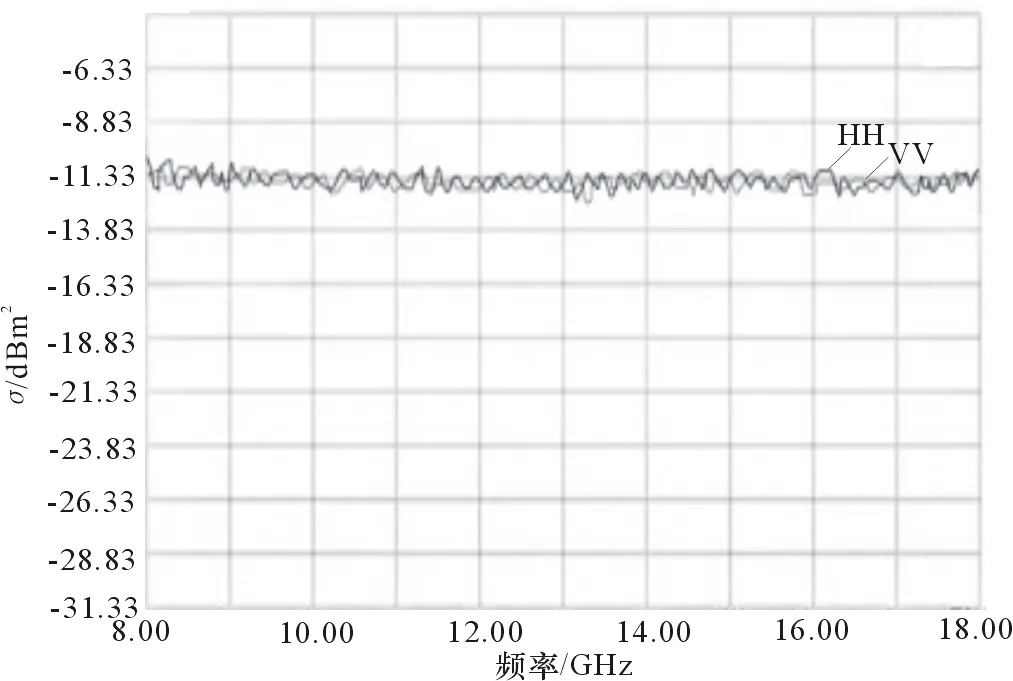
图1 RCS测量标校曲线
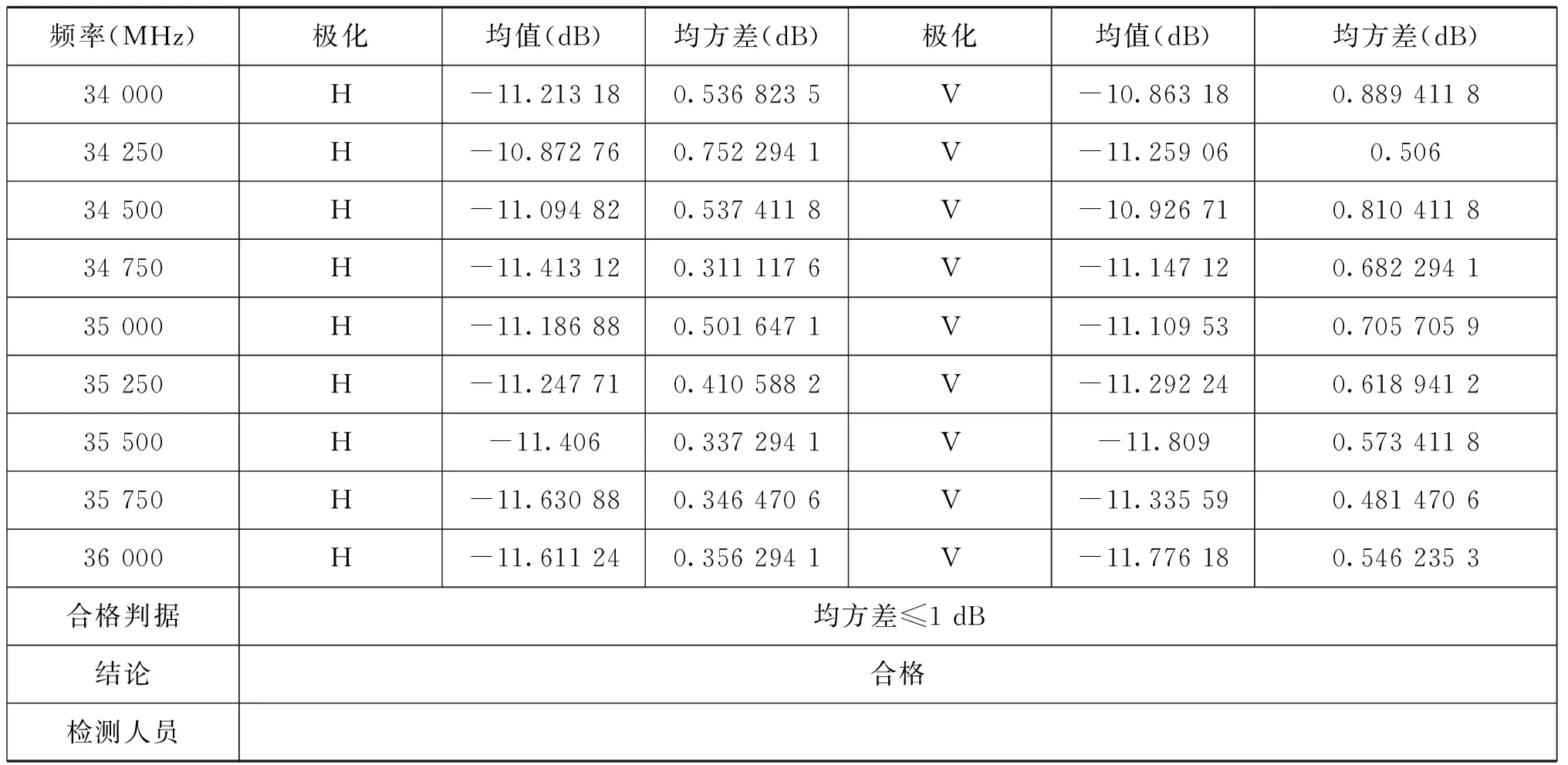
频率(MHz)极化均值(dB)均方差(dB)极化均值(dB)均方差(dB)34000H-11.213180.5368235V-10.863180.889411834250H-10.872760.7522941V-11.259060.50634500H-11.094820.5374118V-10.926710.810411834750H-11.413120.3111176V-11.147120.682294135000H-11.186880.5016471V-11.109530.705705935250H-11.247710.4105882V-11.292240.618941235500H-11.4060.3372941V-11.8090.573411835750H-11.630880.3464706V-11.335590.481470636000H-11.611240.3562941V-11.776180.5462353合格判据均方差≤1dB结论合格检测人员
目前,外场RCS测量基本上都采用无源标校方式,即采用各向同性的金属标准球作为标校体。标校时(参见图2),用气球或风筝等通过系线将标准球升空至距离雷达合适位置(距离上满足雷达信噪比和最小作用距离要求,仰角大于10°以避开杂波背景影响)后,RCS测量雷达对此散射截面积已知的标准球进行测量,得到K值。
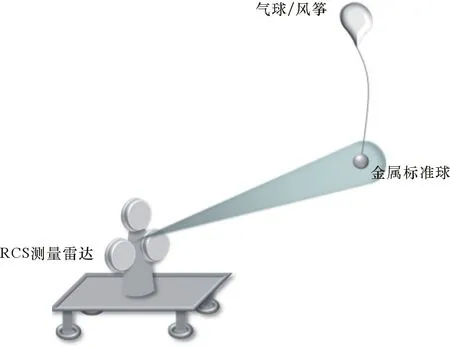
图2 RCS测量标校过程示意图
实践经验表明,在无风或微风下,应采用气球吊放标准球;在2~3级风时,风筝升力不足,无法起飞,气球无法上升到足够高度,达到仰角10°以上的要求(此时受风平压,气球见远不见高);4级风以上,风筝回收困难,风险系数高;有时遇分层风,尤其是低空有风而高空无风情况,风筝可使用但高度无法到达雷达测量仰角要求,此时风筝和气球均无法
使用。此外,风向也是影响标校效果的重要因素:风向若将标准球吹向海上或干净背景方向,则环境背景影响较小(此时,即使标准球较雷达仰角较低,也能获得满意的效果标校),否则,影响较大。
可见采用气球或风筝吊放球的方式,因受风力影响气象窗口小,成功率低,且受风向制约不能主动避开杂波背景对标校效果的影响,经常造成标校失败,形成严重影响测量顺利进行的瓶颈。
为了提高标校成功率,确保RCS测量如期展开,有必要研究其它有效的标准球吊放方式。近年来,随着多旋翼无人机技术的迅猛发展并日臻成熟,无人机吊放标准球已成为现实可能。对比气球或风筝等被动吊放方式,无人机吊放方式因具有风力适应性好且能主动避开高杂波背景等优点(参见表2),或将成为外场标校吊放球的主要方式。因此,研究RCS测量采用无人机吊球标校很有必要。
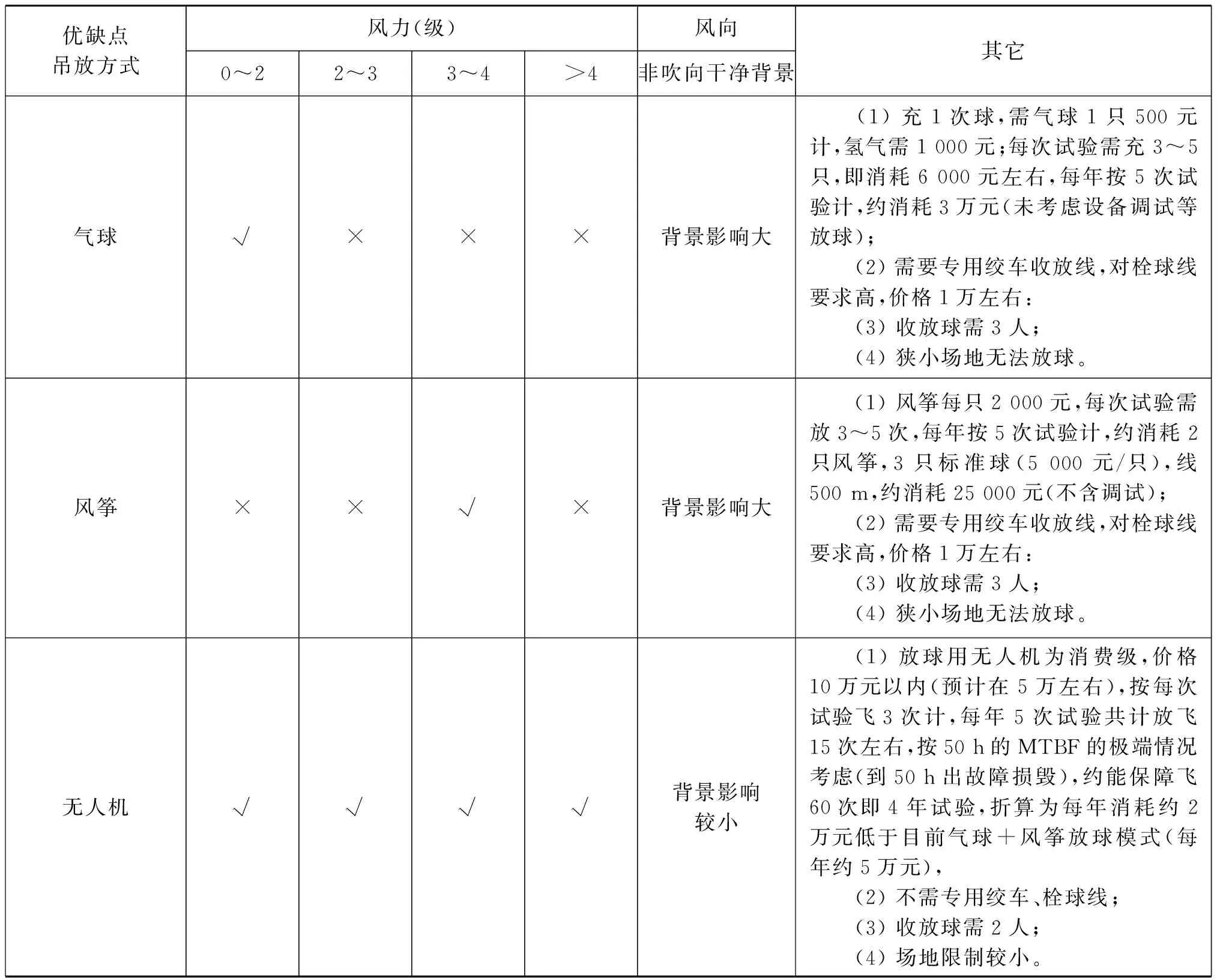
表2 气球、风筝、无人机吊球标校效果对比
2 无人机吊球标校解决方案研究
(1) 需求分析
无人机从用途上分为军用级、工业级和消费级;从结构上分为无人直升机、固定翼无人机、多旋翼无人机等,分类可见表3。
军用级多数采用固定翼或共轴双翼,油动或混合动力,造价高,放飞和回收有较高的场地要求。2010年以来,多旋翼无人机因轻巧灵活、起降影响因素小、便于携带等优势受到广泛关注而迅猛发展,技术日臻成熟,大有后来居上之势,已在灾害、环保监测,消防、交通监控,影视航拍,农业植保等各方面得到广泛应用。
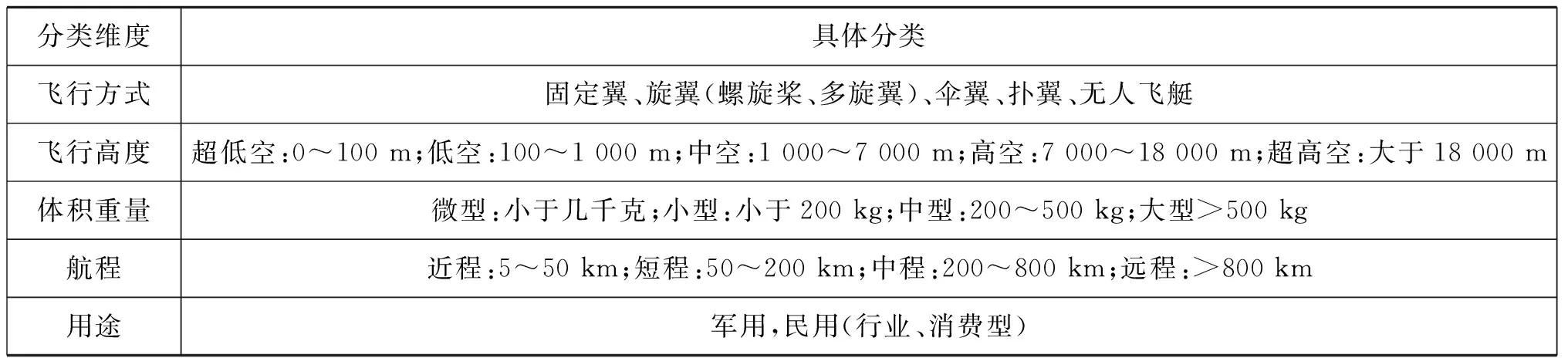
表3 无人机分类
通过技术分析及市场调研,认为采用无人机吊放标准球的时机已经成熟,并确定解决思路如下:从性价比和操控便利等因素考虑,采用民用级多旋翼无人机吊放标准球,相较军用固定翼无人机,其造价低廉,操控方便,收放灵活,维护简单,可靠性高。
从吊放球标校来看,主要需无人机具有如下能力:
(a) 最大有效载荷
RCS测量标校要求(如图1所示),将重约2 kg的金属标准球(φ300 mm)通过100多米系球线(以保证雷达波束仅照射标准球)吊放至距离雷达1~2 km处,仰角大于10°以上(以避开地物杂波等背景),故最大吊挂载荷约3 kg(标准球重<2 kg,100多米系球线<1 kg);
(b) 续航时间
标校在8~18 GHz间按250 MHz间隔一个点,以双极化,并有4个可设机动频点,按每次标校扫描10遍进行,故一次标校时长为(41+4)×2×120 ms(测量周期)×10=204 s,再加上程序设置时间小于1 min,故标校时长<5 min/次,按一次起落进行8次标校计,飞行器收放按10 min计,故满载标校时间即续航时间约50 min。
(c) 环境适应性
海上因无遮挡,风起时将直接吹向无人机和其吊挂的标准球,又因无人机和标准球之间是软连接(尼龙线),通过无人机对其自身的抗风性调整及对标准球的稳定性调整是有较大难度的。因此抗风能力也是一个关键指标。鉴于海上经常遇到较大的风,故提出要求如下:
抗风能力:大于10 m/s(5级风);
小雨、小雪天能正常工作,有防雷、防水、防盐雾腐蚀等能力;
工作温度:-10°~40°。
(2) 方案构想
鉴于国内民用级电动无人机续航力一般在20 min左右,针对标校载荷3 kg和续航50 min的特殊需求属于特种作业,经过咨询国内相关厂家(大疆创新、深圳智航、零度智控、极飞等主要旋翼无人机制造厂家)和市场调研,了解到市面尚无成品无人机满足工作要求,需要采用针对性设计并定制的解决方案。
解决方案[3]是通过精细化搭配多旋翼无人机的电池、电机、电调和桨叶这四大件等,来保障体现其飞行能力的飞行时间(续航时间)、飞行重量(载荷)和耗电量这3个要素,以满足标校时吊放球的要求。
方案设计的基本思路是根据需求进行飞行器构型选择,预估出飞行重量;由飞行重量和轴数推算出起飞悬停时所需的电机拉力以及电机的最大拉力等;由所需的电机拉力等参数选择效能(主要是力效最高,同等拉力下,力效或效率越高越佳)合适的电机;电机选定后,根据电机测试参数及配置表(一般电机厂家都提供)进一步明确电机力效等参数和适配的电池、桨及起飞重量等,并由此验算飞行时间等能否满足要求。
常用多(轴)旋翼无人机分为四轴、六轴和八轴等。比较而言,六轴旋翼[4]的稳定性优于四轴而结构及控制比八旋翼简单,故方案设想采用六旋翼无人机,它主要由飞行控制系统(飞控)、飞行动力系统(电池、电调(电子调速器)、电机(直流无刷)、桨叶四大件组成)、机架等组成,为增加续航时间,采用2块6S22000 mAh电池并联。
(3) 关键指标设计
(a) 飞行重量
由上,飞行重量预估如下:
电机350 g((以恒力Q6L6215 KV350为例)346 g)×6,约2 000 g;
电池2 647 g(以格氏ACE TATTU plus 22 000 mAh为例)×2,约5 300 g;
碳桨150×6(22英寸),约1 000 g;
机架(以飞越T810为例),约1 020 g;
飞控图传及电调:500 g;
载荷:金属标准球+200 m线,按3 000 g计;
故飞行总重量约13 000 g。
根据六轴13 000 g飞行重量得知,每个电机的拉力应在2 167 g(13 000/6)以上才能实现悬停;又根据工程经验,整机重量应该小于电机最大动力的2/5,据此得到每个电机的最大拉力为5 416 g左右。根据电机拉力和构型(轴数)、飞行重量等参数选用适配电机,并在可供选择的电机中选择力效最高的。
(b) 续航时间
比如以恒力电机Q6L6215 KV330为例,由其力效表查得,当拉力为2 255 g(大于起飞悬停拉力2 167 g的需求)时,力效约9.2 g/W。装机时,可以采用如下经验公式预估出飞行时间:飞行时间=60/[飞行重量/(电池实际容量×电池电压×效率)],电压按3.7 V的单片电芯电压计算,估算出如上初步配置下的续航时间为:
60/(13 000/22×2×22.2×9.2)=41.5 min
(c) 飞行效率与电机选型
由飞行时间预估公式可以看出,决定多轴飞行能力的主要指标简单地说无非就是飞行时间、飞行重量、耗电量这3个要素。
因此,工程方案的着眼点在于:其一,在满足有效载荷下尽量减少飞行总重量;其二,提高飞行效率。二者的目的在于提高续航时间。
飞行效率:一般用“g/W”表示,代表每W的消耗能产生几g的拉力,其高低与电机自身的效率和桨等(四大件)搭配等有着密切的关系。电机厂家会给出配桨效率参数,在效率表中,可发现电机效率高一般都是大桨低转速获得,所以如果想让多轴飞行效率高可以考虑尽量用kV值低的电机上大桨。
本方案准备采用定制的高性能电机,以获得悬停拉力下不低于9.5 g/W的力效和不超过300 g重量的电机,其它选用适配的轻质高性能部件,以控制总重量在12 000 g以内,此方案配置如表4所示。
(5)方案验证
根据以上初步配置,在北航稳定飞行控制组(BUAA)的飞行性能评估平台上进行仿真飞行测试,得到如图3所示的预估飞行性能。由仿真测试结果可以看出,按表4配置的无人机吊放球解决方案基本能满足标校的需求(测试时,临时用老虎电机代替配置表中的定制电机)。
3 结束语
多旋翼无人机技术已经日臻成熟,据此采用无人机吊放球标校可以克服采用气球或风筝传统吊放球方式受风的影响,并能灵活地避开低仰角杂波,对于RCS测量是行之有效的标校吊放球解决方案。可以预料这种解决方案还能广泛应用于雷达试验,发展前景广阔。

图3 无人机吊放球仿真飞行测试结果
[1] 黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2005:47-49.
[2] 孙军,孙保杰.外场RCS测量精度估算的工程化建模[J].指挥控制与仿真,2015,37(6):118-121.
[3] 王伟,马浩 ,徐金琦,孙长银.多旋翼无人机标准化机体设计方法研究[J].机械设计与制造,2014(5):147-150.
[4] 郭萧,祝玲,郭青,叶丽荣.四旋翼飞行器设计方案[J].电子世界,2015(15):184-185.
Research into The Solution Scheme of UAV Lifting Standard Ball in RCS Measurement Calibration
SUN Jun,SUN Bao-jie
(Unit 91404 of PLA,Qinhuangdao 066001,China)
This paper studies and designs the radar cross section (RCS) calibration scheme using unmanned aerial vehicle (UAV) to lifting metal standard ball,which aims to solve the bottleneck problem that the calibration success rate is low in current RCS measurement mode using balloons or kites hanging because of weather influence.The scheme has been tested and validated on correlative flight performance evaluation platform,and the result shows that the system can meet the calibration requirements of RCS measurement.
unmanned aerial vehicle;radar cross section;measurement calibration
2016-07-02
TN951
A
CN32-1413(2016)04-0019-06
10.16426/j.cnki.jcdzdk.2016.04.005