未系安全带智能识别中安全带定位关键方法研究
2016-11-17傅生辉刘双喜王金星范连祥牟华伟
傅生辉,刘双喜,王金星,范连祥,牟华伟
(1.山东农业大学 机械与电子工程学院, 山东 泰安 271018;2.山东农业大学 山东省园艺机械与装备重点试验室,山东 泰安 271018)
未系安全带智能识别中安全带定位关键方法研究
傅生辉1,刘双喜2,王金星2,范连祥1,牟华伟1
(1.山东农业大学 机械与电子工程学院, 山东 泰安 271018;2.山东农业大学 山东省园艺机械与装备重点试验室,山东 泰安 271018)
安全带定位是实现机动车未系安全带智能识别的关键;针对道路监控图像特点,提出一种基于梯度变换的安全带定位方法;该方法在对卡口图像进行预处理的基础上,采用自适应阈值边缘检测算法以及积分投影方式定位车辆位置,设立车牌检测区域,以减少运算量,降低干扰,同时利用训练得到的Haar分类器识别车牌位置,通过逼近方式切取车辆右侧图像;最后采用梯度变换算法求得车窗各边缘坐标,实现车窗精准定位,并计算得到安全带位置;试验表明,该方法可实现安全带的准确定位,具有较好的实用性,为后续安全带识别奠定基础。
未系安全带;识别;安全带定位;梯度变换;积分投影;车牌定位
0 引言
安全带是目前应用最广泛的汽车安全装置之一[1]。如今,未系安全带已列入违章检查范围,但相应的检测识别却并不完善。安全带定位是安全带识别中的重要环节,如何有效定位车窗位置,提取安全带佩戴信息,是实现未系安全带智能识别的关键,同时也决定了系统的处理速度和识别的可靠性。在已有文献中,安全带定位方法主要有:积分投影法[2-3],色差均值法[4-6],Haar分类器级联检测法[7-8],Hough变换[9-12]以及人脸识别等。虽然这些方法均在一定程度上实现车窗的提取或安全带定位,但是由于卡口图像环境复杂、光线干扰严重、人脸模糊、难以准确定位车窗或安全带。
一种利用梯度变换定位安全带的方法。该方法采用逼近方式,结合车辆颜色特征的先验知识,利用积分投影与梯度变换算法相配合的方式,实现安全带的准确定位。该方法计算量小,处理速度快,定位准确,具有一定工程应用价值。
1 安全带定位过程
本研究以轿车、商务车、越野车等小型车为主要研究对象。首先对卡口图像进行预处理,再通过积分投影算法建立车牌检测区域(LPDR),并利用车牌分类器对车牌位置进行识别,然后以车牌为参照,采用逼近方式获取车辆右侧图像。最后,分析图像灰度变化,通过梯度变换方式确定车窗位置,并对安全带图像进行提取,从而实现安全带定位。安全带定位算法流程如图1所示。

图1 安全带定位流程
2 图像采集与预处理
本文所研究卡口图像为某市道路监控高清摄像,分辨率为1 600 pix×1 200 pix。为提高算法的适应性和准确度,图像预处理采用灰度化、平滑去噪及削边处理。针对夜晚车辆光线不足的情况,对图像进行自适应增强处理;设立ROI区域,提高车牌位置识别速度。
2.1 图像自适应增强
由于道路光照环境复杂,尤其夜晚光线不足,导致图像模糊不清,为提高图像质量,本研究采用自适应对比度增强算法,对图像对比度及光照条件进行处理。
假设x(i,j)为图像中某点灰度值,局部区域定义为:以(i,j)为中心,大小为(2n+1)*(2n+1)的区域。f(i,j)定义为x(i,j)对应的增强后像素值。
局部平均值:
(1)
式中,mx(i,j)为局部平均值,(2n+1)2为局部区域,x(k,l)为点(k,l)灰度值;
局部标准差:
(2)

(3)

进行图像测试时,D取值采用全局均方差方式,并增加一个参数Amount,以再次控制高频增强的程度。同时,对放大系数CG最大值进行限制,若CG过大,会产生像素饱和现象,即像素值超过255,故CG取值范围为5~15;同时,随着取样半径n的增加,每个像素涉及到区域范围越广,计算量会直线上升。为提高运行速度,Amount应小于300。经多次试验,参数取样半径n=100,Amount取值150,MAXCG为10,夜间图像增强效果如图2所示。

图2 夜间图像的自适应对比度增强
2.2 车牌检测区域的建立
车牌检测区域是以车牌及周边图像作为分类器检索范围,可降低无用信息对定位的干扰,减少算法时间,快速定位车牌位置。本文采用积分投影方式,确定车辆位置,建立LPDR区域。
首先利用基于自适应阈值的Canny边缘检测方法[13]对车辆图像进行处理,并结合膨胀腐蚀算法,去除背景干扰,得到车辆边缘图像(图3(c)所示),然后对图像进行水平和垂直方向的积分投影,实现车辆位置的粗定位,其中,图3(b)为水平投影,对比车辆边缘图像,图中红线处峰值坐标与车辆底边位置相对应;图3(d)为垂直投影,两侧峰值坐标与车辆两侧位置相对应,由此得到车辆粗略位置,最后,参照三点坐标,建立车牌检测区域,即图3(c)中框图所示,以便车牌分类器对车牌进行位置定位。
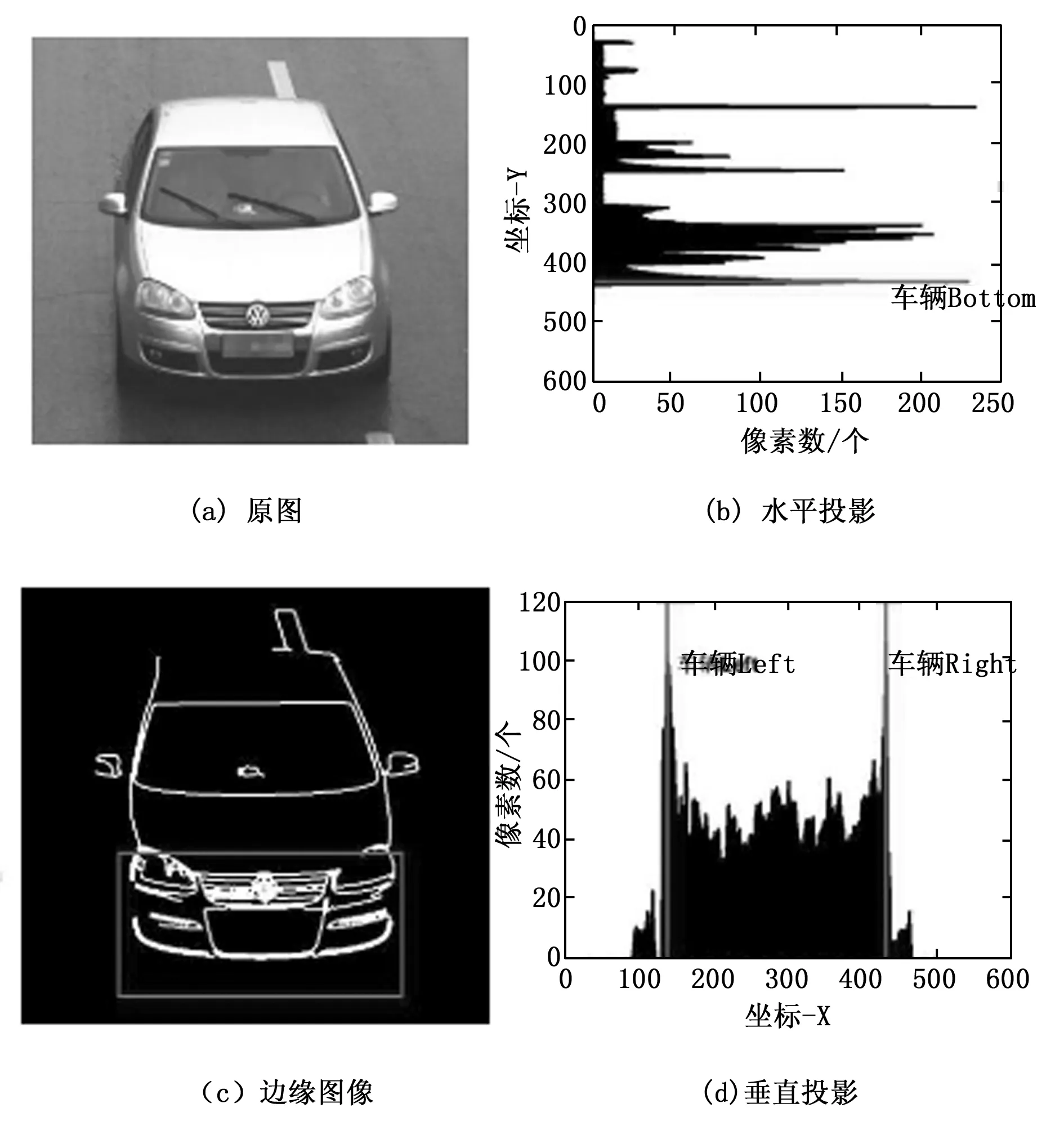
图3 车牌识别区处理
3 目标定位
3.1 基于Haar分类器的车牌定位
车牌定位识别[14-19]是实现安全带定位的基础,本文利用Haar分类器对车牌位置进行识别。Haar分类器是一种基于Haar-Like特征和AdaBoost级联算法的高效两类识别分类器。识别算法主要分为训练部分和定位部分。其中,训练部分选取各类车牌图像共计5 300多张为正样本,非目标负样本为2 500多张,一方面从车牌Haar-Like特征中提取关键特征用于训练,获取车牌分类器;定位部分则对LPDR区域进行关键Haar-Like特征提取,然后利用车牌分类器进行检测,获取车牌位置。 整个算法流程如图4所示。
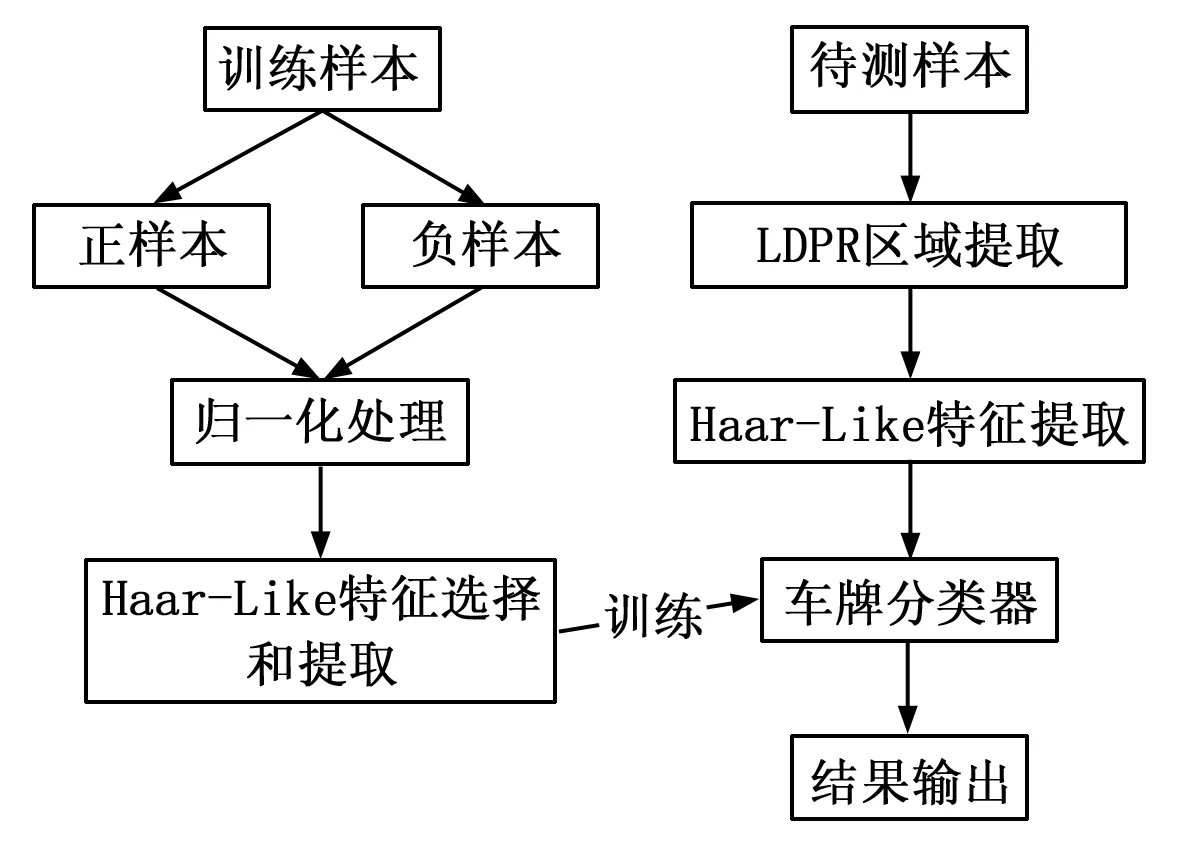
图4 定位算法流程
3.2 基于梯度变换的安全带定位
常用安全带一般经由左肩位置斜向佩戴,驾驶员肩部作为安全带识别区域受驾驶员身高、方向盘等因素干扰最少。考虑汽车外形及颜色差异等影响,本研究采用“逼近法”定位安全带。首先以车牌中心为参照建立坐标系,然后往图像上方偏移一定像素距离,切取车辆右侧图像,如图5所示。由于小型车的高度均在450~530范围内,小型车底边到车窗下边缘距离在285~330范围内,距离相对固定,差异较小,经试验,参照系偏移距离可设为300像素。最后,采用梯度变换方式得到车窗各边缘坐标定位车窗,实现安全带准确定位。

图5 驾驶位图像
根据图像灰度值在车窗边缘会发生突变,进行梯度变换,通过计算灰度值突变确定车窗边缘坐标,实现车窗精准定位。首先对驾驶位图像进行灰度化处理,然后分别选取图像水平和垂直方向的特定行和列作梯度变换,特定行和列要保证在图像车窗范围内,获取灰度值并计算梯度。经过多次验证,本研究选用图像第150行及第60列为扫描线,获取灰度值并计算变化梯度。梯度公式如下:
(4)
其中:Δ为变化梯度;data[j].p为点(j,150)灰度值,或点(60,j)灰度值。部分样本的灰度值及梯度变化值如表1所示。
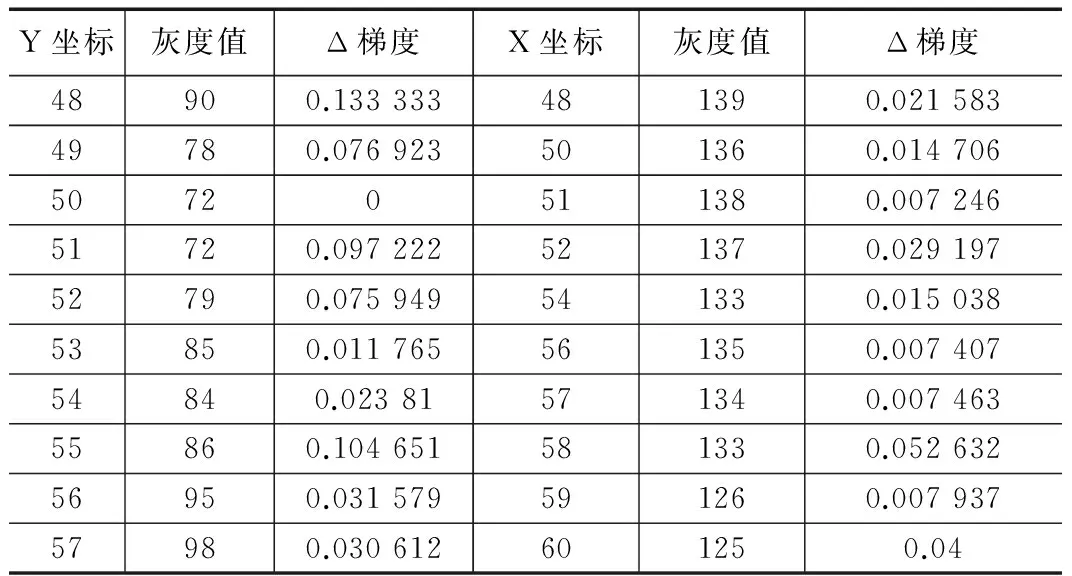
表1 部分样本灰度值及梯度表

图6 样本梯度变化曲线图
图6为车辆右侧图像分别在垂直方向和水平方向的梯度变换曲线,梯度变化曲线在垂直方向有两处峰值,第一处峰值坐标点在(60,56)处,梯度值为0.388 9;第二处峰值车坐标为(60,252),梯度值为0.551,由此得到车窗上下边缘点坐标P1点和P2点。水平梯度曲线中,峰值坐标(150,154),梯度值0.883 7,即车窗右边缘灰度发生突变,求得右边缘点P3;而以三点坐标为参照建立ROI区域,实现驾驶位车窗的准确定位,如图7所示。
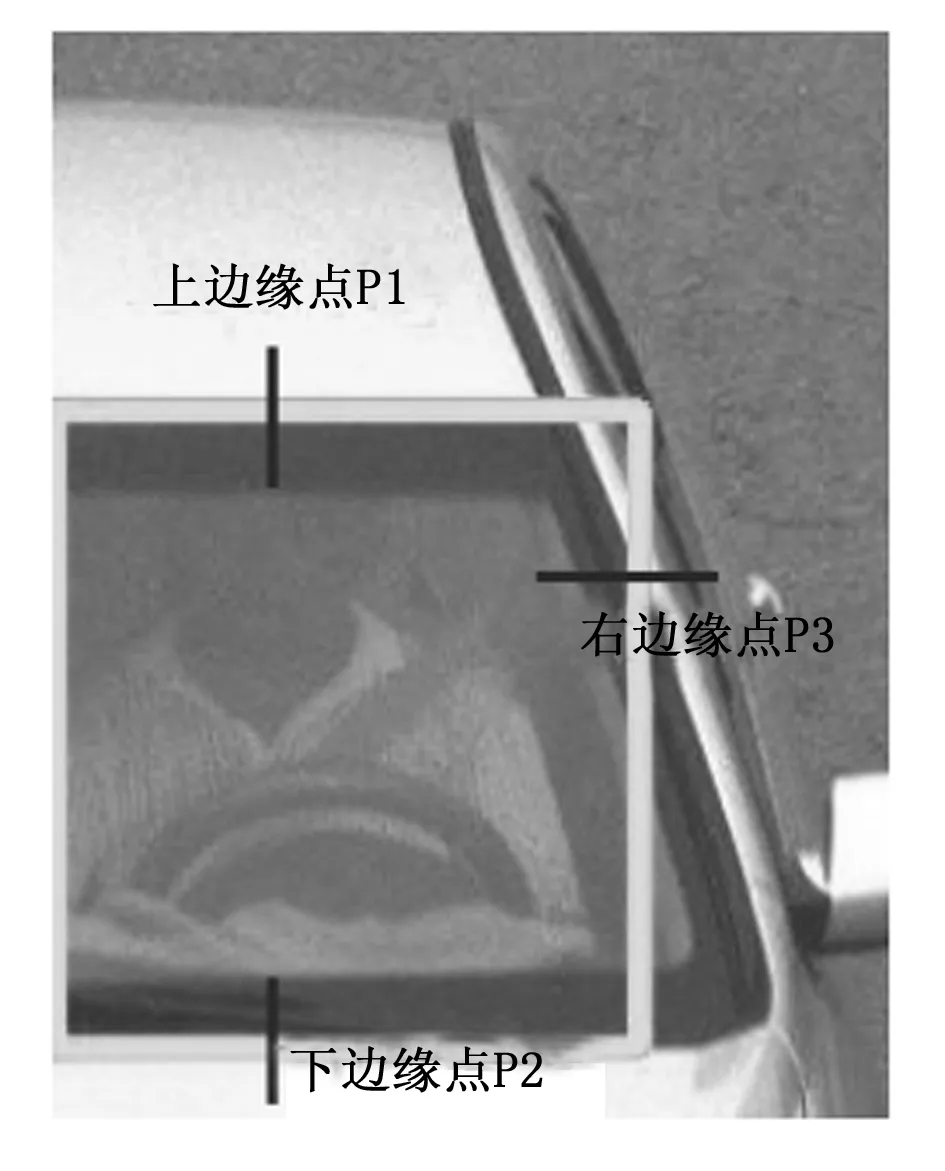
图7 车窗定位结果
车窗准确定位后,则安全带检测区域坐标原点rect(x,y)可求:

(3)
(4)
根据坐标获取安全带佩戴区域图像,大小为80像素×60像素,结果如图8所示。

图8 安全带区域图像
4 试验结果与分析
为验证算法的适用性和准确性,本文随机抽取某市区卡口图像500张进行测试,其中,白天图像300张,夜晚图像200张。所用计算机为联想扬天M4600d,CPU为奔腾G2030,3.0 GHZ,内存4.0 GB,运行环境为VS2010。
试验结果如表2所示,测试样本中,有效样本496张,漏检4张,安全带定位准确率在夜晚达到73.5%,白天定位准确

表2 安全带定位算法结果统计表
率为92.57%,平均定位准确度为84.88%。造成算法差异较大的原因主要有:1)灰色车辆与背景颜色相近,引起车窗定位的偏移;2)夜晚光照条件较差,图像质量较差,造成车型轮廓不明显,且车内无灯光,梯度变化范围小,影响了定位效果;3)部分车牌定位错误,影响右侧车窗图像的切割。经过本文算法处理后,图片质量有所改善,准确率有所提高。
5 结论
安全带定位是实现智能交通系统中未系安全带识别的关键组成部分。为提高目前车窗定位及安全带定位的准确度和效率,本文给出一种基于梯度变换的定位方法,该方法采用逼近方式,对复杂的图像环境逐步剖析处理,将安全带定位转化为单线梯度定位计算,具有较强的适用性,对提高安全带检测的自动化处理具有一定应用价值。
[1] 俞学群, 武阳丰. 机动车安全带的作用、使用现状及干预策略[J]. 中国预防医学杂志,2008(5):439-442.
[2] 葛如海,胡满江,符 凯. 基于灰度积分投影的安全带佩戴识别方法[J].汽车工程,2012(9):787-790.
[3] 黎华东. 智能交通中的违章识别算法研究[D].哈尔滨:哈尔滨工业大学,2014.
[4] 王运琼,游志胜. 基于色差均值的快速车窗定位算法[J]. 计算机应用与软件,2004(1):78-79,117.
[5] 刘直芳,徐 欣,游志胜,等. 基于遗传算法的车窗定位[J]. 计算机应用研究,2002(11):72-74,98.
[6] 张 轶,罗中良,邵 鹏,等. 一种车窗定位算法的设计和实现[J]. 西安航空技术高等专科学校学报,2006(1):12-14.
[7] 吴 法. 图像处理与机器学习在未系安全带驾车检测中的应用[D].杭州:浙江大学,2013.
[8] 陈雁翔, 李 赓. 基于AdaBoost的安全带检测系统[J]. 电子测量技术, 2015,38(4):123-127.
[9] 李冬梅. HOV乘客计数中的车窗定位与提取算法研究[D]北京:北京交通大学,2007.
[10] 李冬梅,郝晓莉. 基于Hough变换的车窗提取算法[J]. 中国测试技术,2007(3):50-52,83.
[11] 骆玉荣. 安全带识别系统的研究与实现[D]. 北京:北京工业大学,2008.
[12] 侯殿福. 车窗检测技术研究[D]. 北京: 北京交通大学,2012.
[13] 雒 涛, 郑喜凤, 丁铁夫. 改进的自适应阈值Canny边缘检测[J]. 光电工程, 2009, 36 (11) :106-111,117.
[14] 文学志,方 巍,郑钰辉. 一种基于类Haar特征和改进AdaBoost分类器的车辆识别算法[J]. 电子学报,2011(5):1121-1126.
[15] 潘秋萍, 杨万扣, 孙长银. 基于Haar与MB-LBP特征的车牌检测算法[J]. 东南大学学报(自然科学版), 2012, 42(s1):74-77.
[16] 黄泽锋. 基于Adaboost的车牌定位方法的研究与实现[D]. 广州, 华南理工大学,2012.
[17] 蒋传伟. 车牌识别系统中车牌定位与字符分割的研究[D].武汉, 华中科技大学,2006.
[18] Abolghasemi V, Ahmadyfard A. An edge-based color-aided method for license plate detection. Image and Vision Computing. 2009,27 (8) : 1134-1142.
[19] 吕文强. 基于Adaboost和SVM的车牌识别方法研究[D]. 南京:南京理工大学,2013.
Research on Key Method of Seatbelt Location in the Intelligent Recognition System for Seatbelt Unfasten
Fu Shenghui1, Liu Shuangxi2, Wang Jinxing2, Fan Lianxiang1, Mou Huawei1
(College of Mechanical and Electronic Engineering, Shandong Agricultural University, Taian 271018, China;2.Shandong Provincial Key Laboratory of Horticultural Machineries and Equipments, Shandong Agricultural University,Taian 271018, China)
The seatbelt location is the key to realizing the intelligent recognition of seatbelt unfasten. According to characteristics of the road monitoring image, a method of seatbelt localization based on gradient transform (GF) is proposed. With the method, by preprocessing the road monitor image, the vehicle position is located by using canny edge detection based on adaptive threshold and horizontal and vertical integration projection. And then license plate detection region is designed, with purpose of reducing image data computation, eliminating the interference from other regions. Nextly, license plate location is obtained by Haar-like cascaded classifier, which can get the image of vehicle on right in the method of approximation. Finally, the edge coordinates of car window can be calculated by gradient transform (GF) that can locate the position of seatbelt. The result shows that the method proposed can locate the position of vehicle window and seatbelt with relatively high applicability and accuracy, which may meet requirements of the urban traffic management.
seatbelt unfasten; recognition; seatbelt location; integration projection; gradient transform; license plate location
2015-12-02;
2015-12-23。
傅生辉(1989-),男,山东泰安人,硕士研究生,主要从事智能交通及机器视觉方向研究。
1671-4598(2016)06-0274-04DOI:10.16526/j.cnki.11-4762/tp
U495;TP
A
