ROV潜水机器人检测技术在黄浦江过江倒虹管的运用实践
2016-11-16鲍月全孙跃平吴建东
徐 禅,鲍月全,孙跃平,吴建东
(上海市城市排水有限公司,上海市 201103)
ROV潜水机器人检测技术在黄浦江过江倒虹管的运用实践
徐 禅,鲍月全,孙跃平,吴建东
(上海市城市排水有限公司,上海市 201103)
城市污水管网由于部分管道埋设深、距离长,且长期处于满水状态,难以实施检测,如横跨大型河流的倒虹管等。结合实际检测案例,介绍把管道声纳检测探头搭载于ROV潜水机器人进行管道检测的技术,以及形成一体化检测的技术方案,并总结对上海市黄浦江下三根倒虹污水管实施检测的成果。
ROV潜水机器人;声纳检测;倒虹管;长距离检测;不停输检测
0 引言
在城市污水管网养护工作中,绝大多数污水管网都能通过各种检测设备或人工潜水等方式进行检测,但埋设较深、距离较长且长期处于满水运行的管道,如穿越大型河流的倒虹管等,实施内部检测作业非常困难。这部分管道经过长期使用后逐渐老化,可能处于带病运行的工作状态,给管网的安全运行带来许多不安定因素。因此,需要尽早实施管内检测,把握管道内部情况,把问题解决在摇篮之中。
1 工程概况
上海市地处长江入海口,地理位置独特,属亚热带湿润季风气候,雨量充沛。上海是中国的经济、金融、贸易、航运中心,其中心城区的排水防汛和污水输送干线的运营管理关系到整座城市的安全稳定。为确保管网运行安全稳定,不仅需要进行日常巡视养护工作,同时还需有计划地对管网进行养护检测。
为了消除对黄浦江过江倒虹管的检测盲区,采用ROV(潜水机器人)上面搭载管道声纳检测设备的技术,对黄浦江过江倒虹管进行检测,摸清管道的使用现状。
本次实施检测的管道为:(1)吴闵外排污水倒虹管,1根,直径DN2 200 mm,长度为716 m,距黄浦江底部最深约30 m;(2)污水二期陆家浜污水倒虹管,2根,直径DN2 200 mm,长度各为543 m,距黄浦江底部最深约20 m。图1为倒虹管位置示意图。

图1 倒虹管示意图
2 黄浦江过江倒虹管检测难点分析
目前,常用的管道检测手段有CCTV电视检测、声纳检测、电子潜望镜检测、潜水员进入管道检测等技术。其中,直径在DN250~DN1 350 mm的中小型管道检测普遍采用CCTV检测、声纳检测、电子潜望镜检测等技术,直径在DN1 500以上的大型、特大型管道通常采用潜水员进入管道检测。
黄浦江过江倒虹管管径大,距离长,污水输送量多,检测难度非常大。目前拥有的检测手段都无法满足黄浦江倒虹管检测需求。难点分析如下:
(1)受上游运行限制,管道停水时间很短,无法排空管道积水,人员无法进入检测;
(2)待检测的倒虹管位于黄浦江江底,普遍深度在20 m以上,超过潜水人员下潜深度,无法实施检测;
(3)管道为下倒虹管,常年处于满水状态,CCTV、电子潜望镜等设备无法实施检测;
(4)待检管道距离较长,分别达到543 m和716 m,普通检测设备受性能限制无法满足全程检测的要求。
3 ROV搭载声纳检测技术
3.1 ROV检测技术
ROV(REMOTE OPERATED VEHICLES)遥控潜水器,也称潜水机器人,是一种水下极限作业机器人,可解决潜水人员在极端水下环境中所受到的某些限制问题,广泛使用在科考、海油工程、军警水下探测等场合。其工作方式是技术人员在地面的控制台操纵ROV,进行水下视频摄像、声纳探测等,还可以通过遥控机械手臂进行管道内作业。
本次检测采用的ROV Seamor型潜水机器人系统属于观测级,主要用于深潜观测作业,最大潜水深度达到300 m,装备有高清晰彩色摄像机、四支强力推进器、定位仪、压力和深度传感器等。设备控制简单,动作灵活,可自动巡航、悬停、左右横向移动,其开放式的结构设计可以搭载多种测量设备,如图2所示。

图2 ROV Seamor型潜水机器人
3.2声纳检测技术
声纳检测技术(sonar inspection)是采用声波反射技术对管道及其他设施内的水中物体进行探测和定位,并能够提供准确的量化数据,从而检测和鉴定管道病害情况的一种检测方法。适用于污水、雨水、合流等管道功能状况检测和部分结构缺陷检测。进行结构检测时的结果只能作为参考,现有设备适用管径DN300~DN6 000 mm,可对不同管材的管道进行检测。
4 ROV检测技术在黄浦江污水倒虹管运用实践
4.1检测方法的选择
为了解黄浦江过江倒虹管道的运行现状,上海市城市排水有限公司联合上海有专业资质的检测单位,对吴闵外排污水倒虹管、污水二期陆家浜污水倒虹管进行检测。根据调阅待调查管道的竣工平面图和倒虹井的结构图等资料,并与上下游泵站管理单位沟通及现场勘查,考虑实施检测的难度,决定采用ROV搭载管道声纳技术进行排水管道检测,并编制了相应的检测技术方案。
4.2检测技术措施
(1)利用ROV Seamor潜水机器人搭载平台的作用,搭载声纳系统进入水下30 m深的竖管管道中,实施检测。
(2)为了解决长距离检测过程中电缆重力问题,使用了“0”浮力电缆,该电缆有一定的拉伸强度,可在应急情况下起到牵拉ROV绳索作用,确保设备在失去动力的情况下安全进出管道。
(3)三根倒虹管在黄浦江的东西两岸分别设有专用的检测工作井。考虑现场实际情况,吴闵外排污水倒虹管检测从黄浦江西岸工作井(泵站出水高位井)放入检测机器人向管道中央位置检测,污水二期中建设的污水倒虹管检测从黄浦江东岸工作井(闸门井)进入检测。
4.3检测施工的流程
采用ROV检测技术施工的流程见图3。

图3 ROV潜水检测流程图
4.4检测结果分析
通过管道声纳检测,可提供完整的声纳扫描图像,图像能十分清晰地反应出管道结构和积淤情况。通过相关处理软件把每一秒检查数据自动保存至专用的PC硬盘中,随时提取、播放、截取,并能根据这些数据自动计算出管道内的淤泥量的形成变化曲线和总量数据,从而结合建设部行业规范《城镇排水管道检测与评估技术规程》(CJJ 181-2012)判断管道是否需要养护或有无重大缺陷隐患。图4、图5为声纳检测软件界面截图。

图4 管道声纳回波扫描图像

图5 声纳检测软件界面截图
4.5检测的结论
通过对管道的声纳检测结果录像,可以发现管道内部的变形及重大破裂等结构缺陷,并可以对管道内部的淤泥堆积情况进行判断,为这些倒虹管的养护维修提供第一手的依据。本次管道采用ROV技术检测的结果见表1。
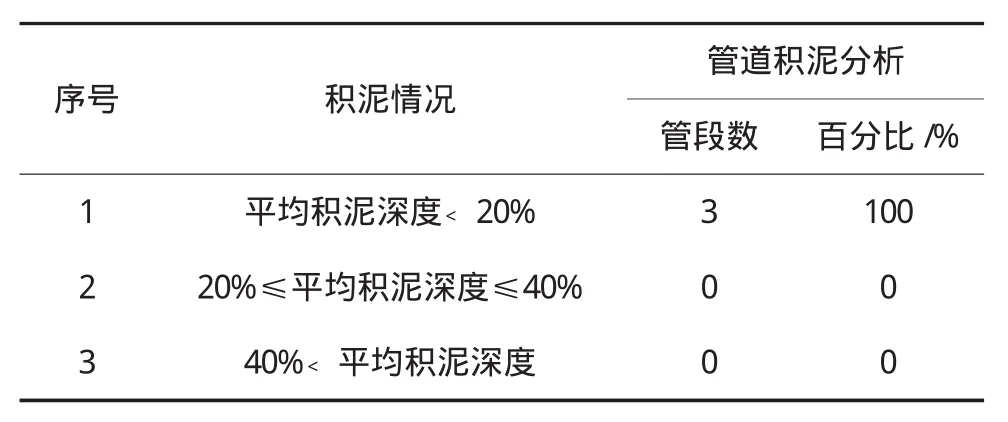
表1 黄浦江倒虹管检测结果表
从表1可知,本次检测的三段横跨黄浦江管道的淤泥堆积程度都小于20%,根据《城镇排水管道检测与评估技术规程》标准判断:本次检测的三段横跨黄浦江的污水倒虹管道情况良好,都无需养护。同时,从得到的检测图像可知,倒虹管内部都没有变形和重大破裂等缺陷,结构性情况也处于正常状态。
5 结 语
在相关部门的多方配合下,本次检测项目于2016年6月完成,填补了上海黄浦江过江倒虹管检测的空白,为大型长距离过江倒虹管道的检测积累了宝贵的经验,具有推广意义和实用价值。在当前采用传统的技术对大型长距离管道很难实施不停输检测的情况下,本次采用ROV搭载管道声纳技术对大型长距离管道不停输检测的成功为国内同类管道检测提供了先例。随着城市大型管道检测养护工作要求的不断提高,希望在地下管线检测领域能够研制出更多先进的检测方法,以便今后在实施大深度长距离地下管道检测时有更多的方案选择。
[1]CJJ 181-2012,城镇排水管道检测与评估技术规程[S].
[2]DB31/T444-2009,排水管道电视和声纳检测评估技术规程[S].
TU992.4
B
1009-7716(2016)10-0118-03
10.16799/j.cnki.csdqyfh.2016.10.037
2016-08-31
徐禅(1985-),男,浙江平湖人,助理工程师,从事排水管网技术管理工作。
