一种基于扩展卡尔曼滤波算法的MMC系统故障诊断策略
2016-11-16谭国俊
殷 实 谭国俊
(中国矿业大学信息与电气工程学院 徐州 221116)
一种基于扩展卡尔曼滤波算法的MMC系统故障诊断策略
殷实谭国俊
(中国矿业大学信息与电气工程学院徐州221116)
模块化多电平换流器(MMC)凭借其诸多优势已成为高压大功率工况下的核心拓扑,针对MMC系统常见子模块故障的诊断技术直接影响着系统的安全稳定运行。在分析MMC系统离散域数学模型和发生子模块功率单元故障时内部状态变化的基础上,提出一种基于扩展卡尔曼滤波算法(EKFA)的MMC故障诊断策略,旨在通过观测系统内部环流状态以快速判定系统是否处于故障状态。首先,参考系统离散域数学模型建立系统扩展卡尔曼滤波方程;其次,构建故障诊断系统的判别机制与定位环节;最后,为验证所提故障诊断策略的可行性和有效性,在子模块不同类型故障状态下,对其进行仿真和实验的对比分析。实验结果表明,所提故障诊断技术能够快速判定故障状态,并定位故障点所在位置,提升MMC系统的安全性能。
模块化多电平换流器扩展卡尔曼滤波故障状态分析监测模式定位模式
0 引言
在功率器件电压和电流受限的情况下,多电平拓扑结构是中高压大功率变频器重要解决方案。相比于中点钳位、飞跨电容、H桥级联等经典多电平拓扑结构,模块化多电平换流器(Modular Multi-Level Converter,MMC)秉承级联结构的模块化优势,由于其多模块串联、共直流母线的拓扑特点,在无需工频变压器的条件下即可直接并入高压电网,节约成本。同时MMC拓扑结构又有输出电压畸变率低、电流谐波含量少、功率器件开关应力小等诸多优势,使其在新能源并网、电能传输、高压变频调速等领域得到广泛应用[1-6]。
随着对MMC换流器系统的深入研究,不同控制技术相继被提出,提升系统安全运行能力依然是其控制器设计的首要目标。MMC型换流器拥有数目庞大的子模块(Sub-Modules,SM)和功率开关器件,每个功率开关器件都是潜在的故障点。结构相同、数目庞大的子模块串联结构虽然提升了系统故障检测的难度,但同时也是其优势所在。多模块化的结构能够允许故障MMC型换流器短时间内运行于内部故障状态下,并利用冗余子模块替换掉故障点,避免造成系统永久性故障。然而若使MMC型换流器能够充分发挥优势,其故障诊断系统的设计需完成如下工作:安全运行状态时监测,故障状态时无需停机,在较短时间内即可确定系统故障状态,并对其故障子模块定位,旁路,再投入冗余模块[7-13]。
现阶段针对多电平换流器系统,工程实际中应用较广、较为成熟的故障检测问题解决方案可分为3类:①基于数据分析的故障诊断;②基于反馈信息的故障诊断;③基于系统模型的故障诊断。文献[14]提出一种基于人工智能多电平换流器故障诊断方法,该方法的优势在于利用系统所获得数据及专业数据对系统状态进行分析,无需获得系统繁杂的数学模型,但故障检测环节准确度较低且构建诊断数据库难度较大。文献[15]针对MMC换流器系统提出一种基于子模块开关信号与反馈内部状态的故障诊断策略,该方法能够实现在线检测子模块故障类型,但当子模块数目庞大时,需逐一计算子模块电容电压增量指标系数才能判断系统是否处于故障状态,运算量过大。文献[16]提出一种基于滑模观测器的故障诊断策略,该方法是针对MMC换流器常出现的IGBT开路故障,且能够规避采样误差和系统波动所造成的干扰,但需对子模块进行逐一观测,运算耗时长,可实现度低。
本文提出一种基于扩展卡尔曼滤波算法(Extend Kalman Filtering Algorithm,EKFA)的MMC换流器故障诊断策略。首先建立MMC系统数学模型,并分析其工作机理,针对MMC换流器多功率开关器件、多传感器等系统特性,设计扩展卡尔曼滤波器。卡尔曼滤波器的建立不仅能够观测系统内部状态变量,实现MMC换流器的故障检测工作,同时可以避免控制器在采样过程中系统自身产生的过程噪声以及传感器噪声对控制结果产生的干扰。基于扩展卡尔曼滤波器的故障检测系统,通过评判系统内部状态变量的观测量与其实际反馈量收敛情况来确定系统是否处于故障状态,若确定系统运行于故障状态则进一步定位故障点所在位置。最后对本文所提检测方法进行仿真与实验验证。
1 模块化多电平换流器数学模型
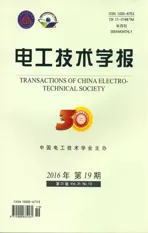
MMC换流器拓扑结构如图1所示,由三相六桥臂组成。系统各桥臂结构相同,均由n个相同结构的子模块及一桥臂电感串联构成:子模块作为换流器系统的功率单元,桥臂电感起抑制系统内部环流、缓冲故障的作用,上、下两个桥臂构成一个换流器相单元。
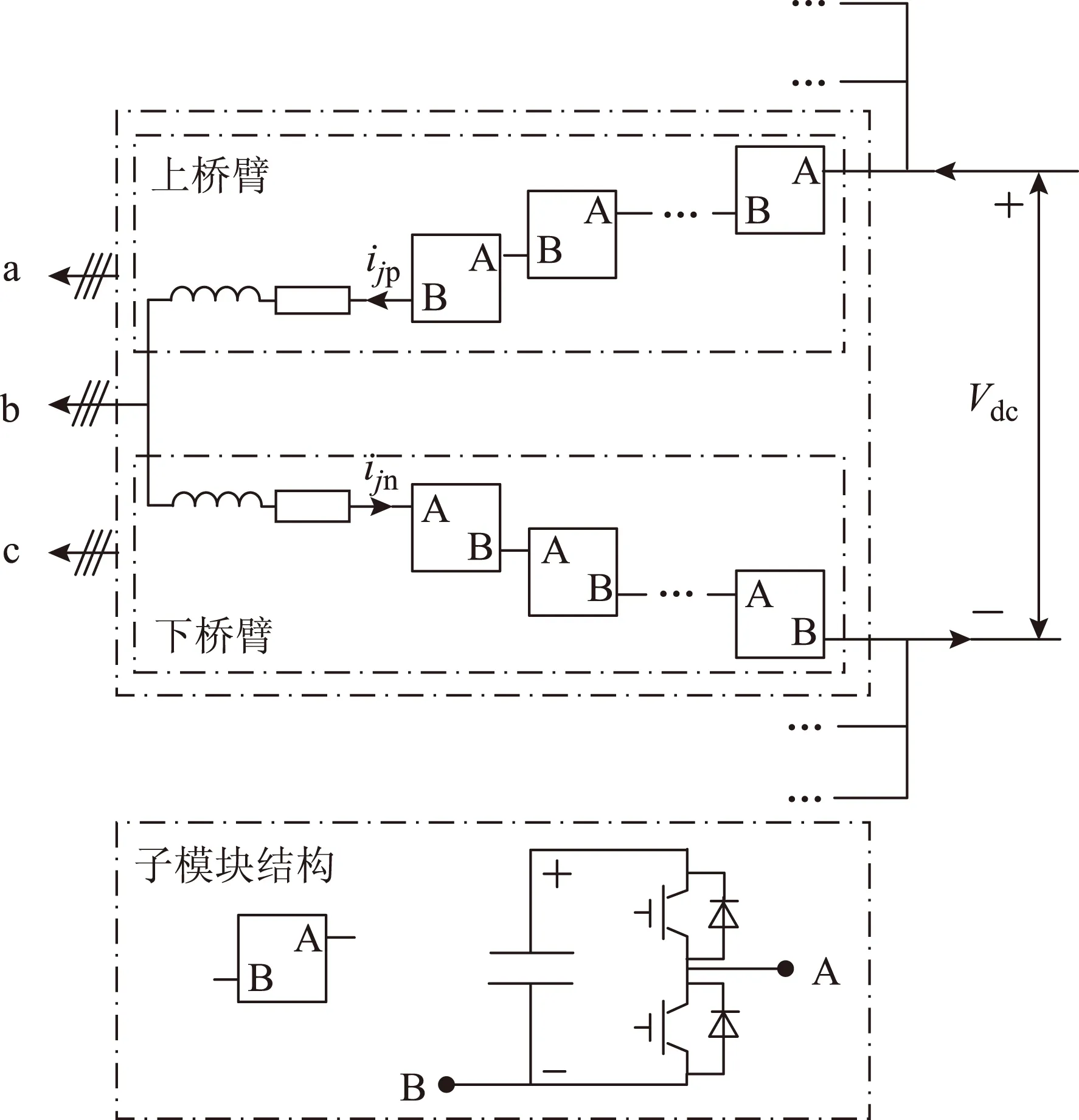
图1 MMC换流器拓扑结构Fig.1 The topology structure of MMC
如图1所示,子模块是由2个互补导通的功率开关器件并联储能电容所组成的半桥结构,其输出电压vjkm则由子模块开关状态及电容电压所决定。
(1)

MMC换流器各子模块之间相互独立,根据基尔霍夫电流定律,各相上、下桥臂电流与系统交流侧电压、子模块投切状态等系统变量间的关系式为
(2)
(3)
式中,Lb为系统桥臂电感,mH;R为桥臂等效损耗电阻,Ω;ijp、ijn分别为各相上、下桥臂电流,kA;Vdc为直流侧电压,kV;vj为交流侧电压,kV。
由图1可知,MMC换流器直流侧电流(idc)均分至a、b、c三相,经各相上、下桥臂通路完成对系统子模块的能量传输以使其储能电容电压维持基本稳定。基于基尔霍夫电流定律,桥臂电流与直流侧电流、各相内部环流之间的关系为
(4)
(5)
整理式(2)~式(5),可获得系统内部环流、子模块电容电压与直流侧电压、子模块投切状态等系统状态变量间的关系为
(6)
由式(2)、式(3)、式(6)可知,系统内部环流、子模块电容电压、投切状态等变量之间存在强耦合关系。若MMC换流器系统发生子模块故障时,其电容电压、系统内部环流也将发生较大变化,偏离稳定状态,促使系统失稳。如若不及时判断出系统是否运行于故障状态并确定故障点所在位置并对其进行有效处理,将威胁全系统安全运行,造成永久性故障。
2 子模块故障状态分析
由于MMC换流器拓扑结构复杂,子模块数目庞大,系统潜在故障也多种多样。参考MMC换流器系统多发生的故障类型,本文将潜在故障设定为子模块功率开关器件开路故障,并分为3类,如图2所示。
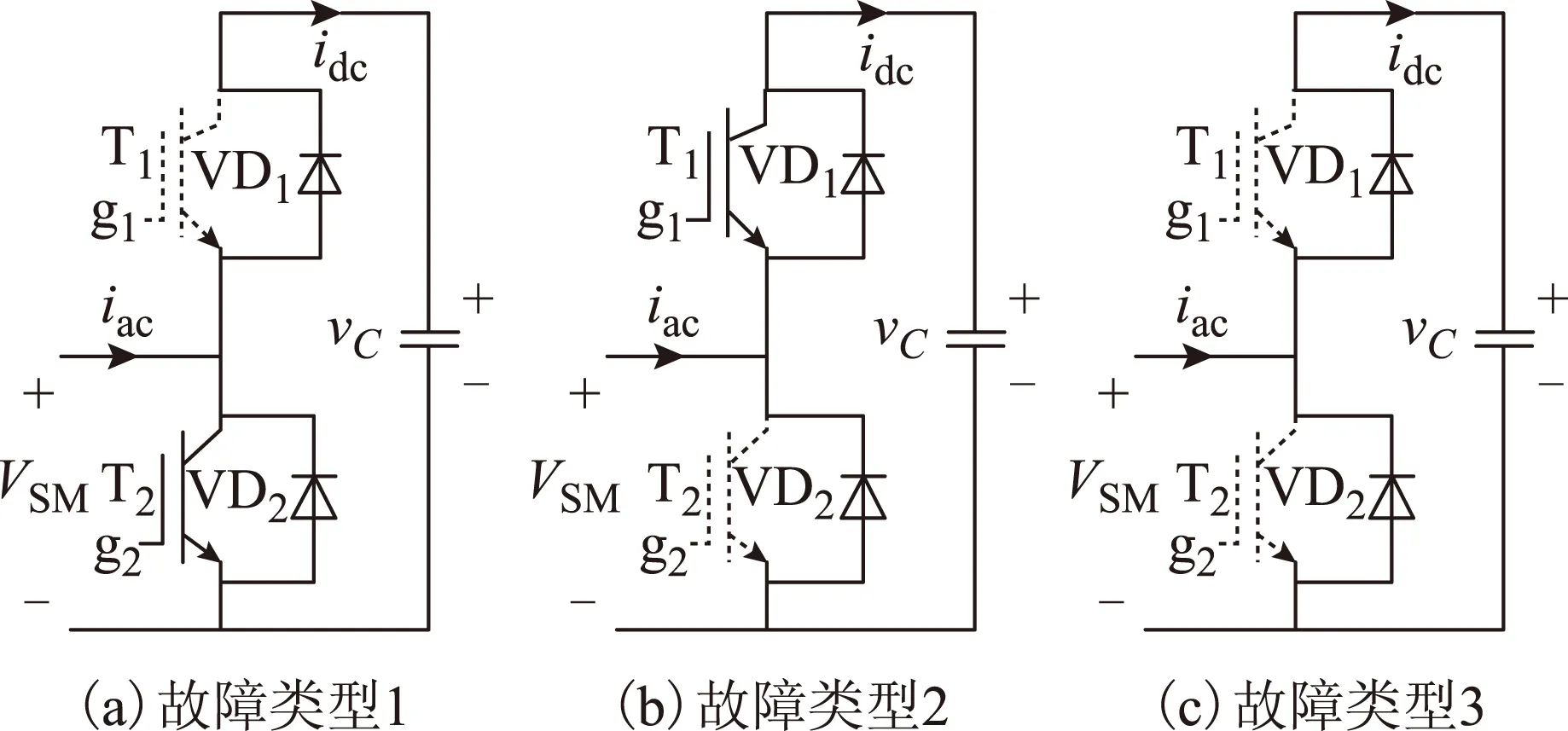
图2 子模块故障状态Fig.2 Fault conditions of sub-module
由于系统结构的特点,子模块作为系统功率单元,并不是理想直流源供电,而是储能元件维持电压供给,在投切过程中完成能量传递过程。如图2所示,若子模块功率开关器件发生开路故障,在其未被旁路的状态下,对应的子模块输出电压如下。
故障类型1
(7)
故障类型2
(8)
故障类型3
(9)
式中,VSM为子模块输出电压,kV;vC为电容电压,kV;SSM为子模块投切状态;iarm为其附属桥臂所流过的电流,kA。
MMC系统通过选择性投切子模块以实现其电容电压数值波动在一定范围内,若SM的输入功率PSM为
PSM=iSMVSM=SSMiarmvC
(10)
由式(10)可知,若系统SM发生如图2所示的3种不同开路故障,其对应的输入功率与其附属桥臂电流iarm存在如下关系式。
故障状态1
(11)
故障状态2
(12)
故障状态3
(13)
式中,PSM为子模块电容电压吸收功率,kW。
基于式(10)~式(13),故障SM的子模块电压与正常状态时的对比见表1。

表1 不同故障状态子模块电压特性对比Tab.1 Comparison table of different fault sub-nodule’s state
3 故障诊断装置设计
基于滤波技术的故障检测方法最早由美国麻省理工学院Beard教授于1971年提出。基于观测器的故障检测与诊断系统(FaultDetectionandDiagnosis,FDD),一般思路是将系统的可实测获得的测量量与系统模型所提供的观测量进行比较,从而产生残差,并对残差进行分析,与预设阈值进行比较来实现故障监测。基于系统模型的FDD策略分为残差产生和残差估计两个环节。当系统正常运行时,残差近似为零;而当系统发生故障时,残差则明显偏离零点。
3.1扩展卡尔曼滤波器设计
扩展卡尔曼滤波技术为卡尔曼滤波算法在非线性系统观测领域的延伸,基本原理如图3所示。EKF算法采用状态空间概念描述系统结构,对系统连续非线性模型进行线性化和离散化处理,利用系统模型与已知状态量递推计算获得卡尔曼滤波的观测量,与影响系数矩阵法相比较,对于测量噪声具有鲁棒性,故障检测结果准确率更高,出现误诊的几率更小[17,18]。
图3 卡尔曼滤波算法原理Fig.3 The principle of Kalman filtering algorithm
扩展卡尔曼滤波非线性状态方程一般形式可表示为
(14)

EKF算法以受观测系统离散域数学模型为基础,利用上一控制周期的状态估计值和当前时刻的输入变量、测量状态来获取非测量状态。若受观测系统的状态变量同时为观测变量,其估算过程如下。
1)计算受观测系统状态预测值
(15)
2)计算状态预测误差协方差矩阵
(16)
3)计算卡尔曼滤波器增益矩阵
(17)
4)状态观测值矫正

(18)
5)计算最优状态误差协方差矩阵

(19)

针对MMC变流器系统,若系统内部环流为状态变量同时为观测变量,子模块电容电压与其投切状态等为输入变量,参考式(14),将MMC数学模型进行离散化处理,可得环流离散域简化数学模型为
(20)

为简化系统设计复杂程度,降低主控系统运算负荷,同时提升扩展卡尔曼滤波器的可实现性,假设系统子模块均压良好,则上、下桥臂端口电压可简化为
(21)
(22)

根据式(20)~式(22),参考EKF估算过程,系统各相环流预测量与观测量的表示方法为
(23)
参考上述针对MMC变流器所设计的EKF滤波器运算过程,由式(23)可知,通过在上一控制周期内采样环节所获得的子模块电容电压、桥臂电流等内部变量进行递推运算即可获得现控制周期各相环流的观测值。
3.2监测模式
若MMC变流器系统运行于无故障状态,EKF所输出的环流观测值与实际值虽有一定偏差,但其数值较小,可认为滤波器的观测量收敛于系统实际反馈值。由式(14)可知,若系统子模块功率开关器件发生开路故障状态时,观测残差将产生数倍增幅,为准确的判断受监测系统是否发生故障,需设定一个合适的偏差阈值
(24)
式中,Sfault为系统故障指示信号;Ithreshold为故障监测装置判断阈值。
3.3定位模式


图4 基于EKFA故障诊断策略流程Fig.4 The flow chart of fault diagnosis system based on EKFA
4 仿真分析
为验证所提子模块故障诊断方法的控制效果,搭建了基于模型预测控制器(Model Predictive Control,MPC)[19-21]的三相MMC逆变器系统仿真模型。在系统发生不同类型故障时,对所提故障诊断检测方法进行理论验证,其系统控制框图如图5所示,仿真关键参数见表2。
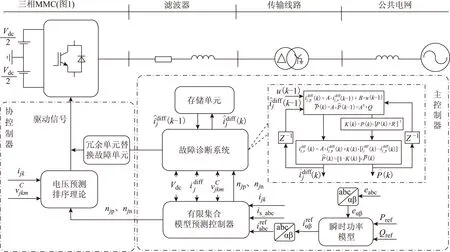
图5 MMC系统控制结构框图Fig.5 The control structure of MMC systerm

参数数值网侧电压频率fs/Hz50直流电压Vdc/kV60各相子模块数量2n40子模块电容Csum/μF5600桥臂电感l/mH4网侧滤波电感L/mH2网侧等效电阻R/Ω0.01采样频率fsam/kHz10死区时间td/μs4
图6为MMC换流器系统稳态仿真波形。由图6a、图6b可知,基于FCS-MPC控制器的MMC换流器系统输出电流正弦度较高,跟踪效果好,相间环流抑制效果显著,上、下桥臂电流相位相差180°,相间环流数值为Idc/3。由图6c可知,子模块电容电压波动较小,均压效果良好,为其幅值的±0.67%。由图6d可知,若系统运行于无故障状态时,EKF的观测值收敛于系统环流理论采样值,误差微小,可忽略不计。
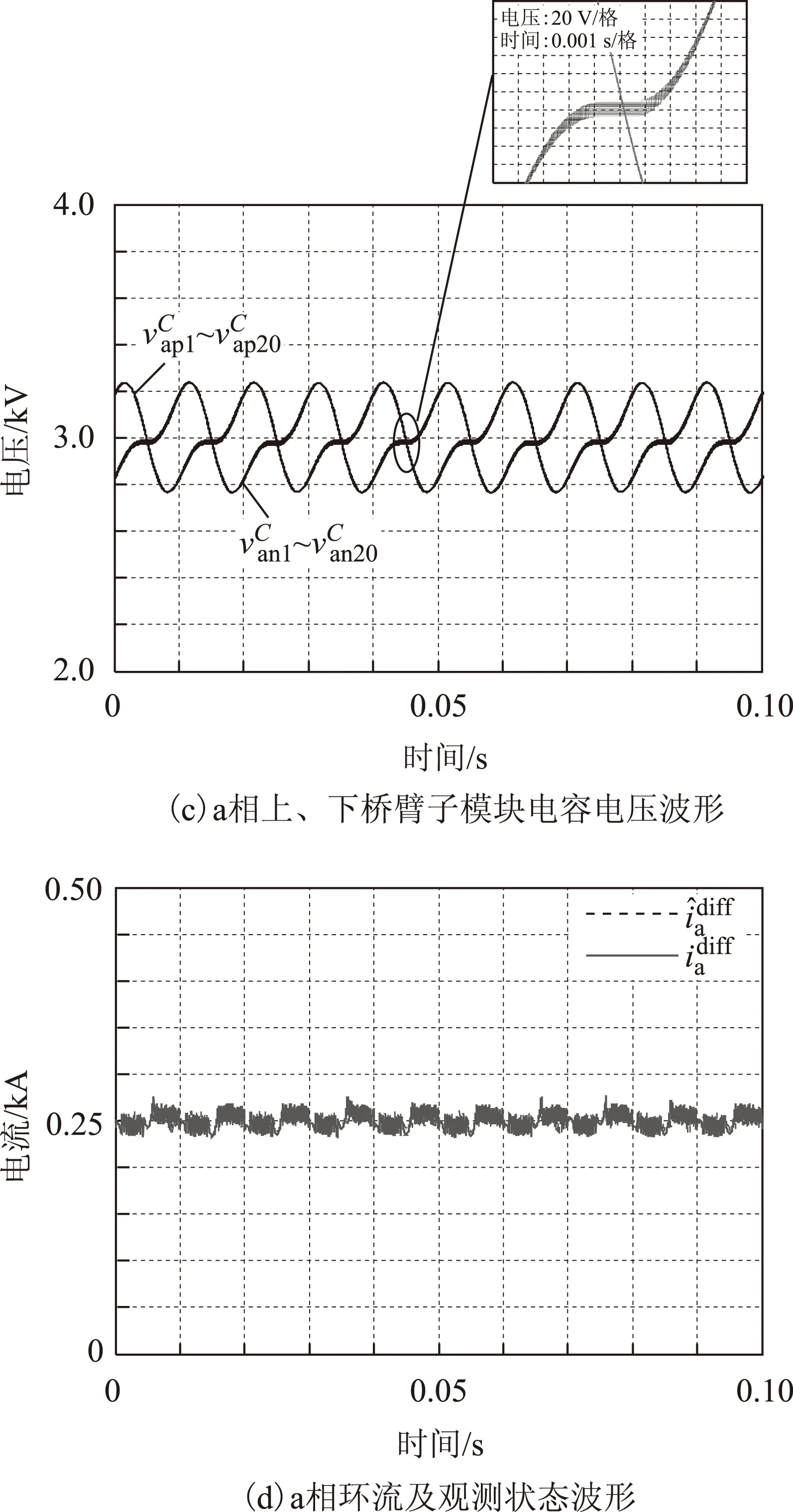
图6 MMC换流器稳态仿真波形Fig.6 The simulation waveforms of MMC in steady state
图7为MMC换流器系统发生不同类型子模块故障时对应的动态仿真波形。图7a为系统环流采样值与EKF滤波器所获得的观测值,开路故障1发生前系统处于稳定运行状态,环流抑制效果显著,其观测值收敛于其实际反馈值;故障发生之后,系统环流产生严重畸变,幅值增大;故障发生4.2 ms后,观测残差增大且大于预设阈值,故障监测系统进入定位模式。图7b为该相子模块电容电压波形,与第2节中子模块电容电压状态理论分析一致,功率单元发生开关器件开路故障之后,流入故障子模块的电能要远大于未发生故障的子模块,所以其电容电压大幅上升,并与其所附属桥臂其他子模块的电容电压差值逐渐增大且大于预设阈值,并以此为定位依据,确定故障子模块序号,完成故障诊断系统的定位工作。图7c~图7f则分别为故障类型2、3对应的系统动态波形。
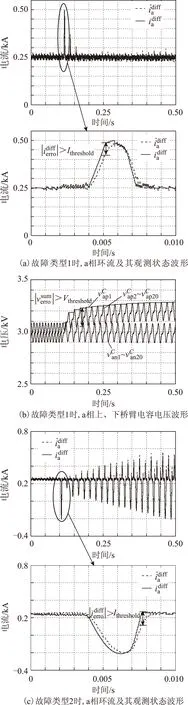
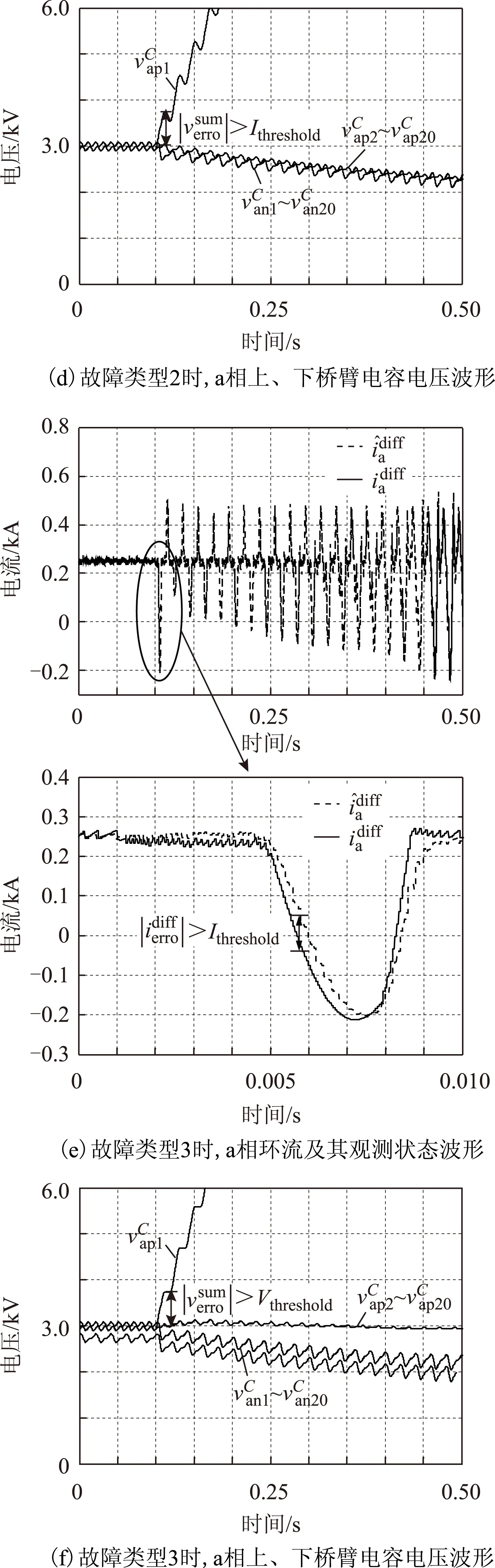
图7 不同故障类型动态仿真波形Fig.7 Dynamic simulation waveforms of different fault types
5 实验验证
为验证上述针对MMC系统故障检测方法的正确性和可实现性,搭建三相MMC换流器实验平台,如图8所示。其中,MMC系统硬件参数与仿真参数基本一致:直流母线电压为200 V;负载为阻抗负载,R=8 Ω,L=23 mH; 核心控制器采用DSP+FPGA数字处理系统架构,DSP28335芯片作为主控制器完成核心算法,FPGA3S500E作为协处理器完成AD采样、死区保护等辅助功能,系统控制器结构如图5所示。IGBT采用英飞凌公司的FF400R12KT3,为方便测量,将需观测的输出线电压、子模块电容电压、输出电流等经D-A转换并用安捷伦MSO6014A示波器观测。实验均以a相故障为例进行。

图8 三相MMC逆变器实验样机Fig.8 Experimental prototype of three phase MMC inverter
图9为MMC换流器的系统稳态实验波形。由图9a可见,由于子模块电容的均压效果好且示波器观测通道有限,在系统运行于无故障稳定状态下时,子模块电容电压波动较小,在±2%以内。由图9b、图9c可见,上、下桥臂电流相位相差180°,环流抑制效果良好,且EKF所获得系统环流观测量与采样系统所获得数值偏差较小,趋近于0。

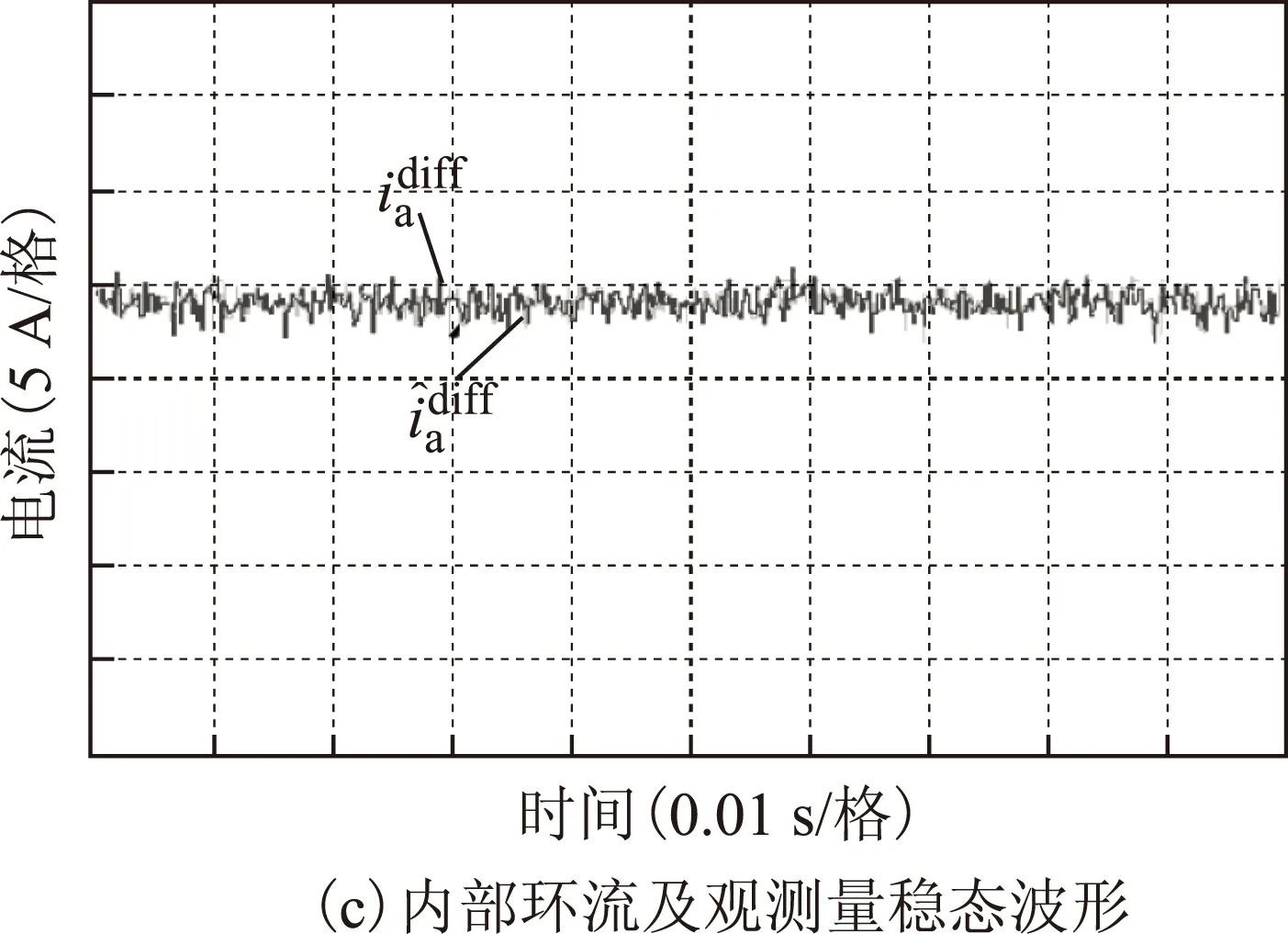
图9 三相MMC系统稳态实验波形Fig.9 The experimental waveforms of MMC in steady state
图10为系统发生不同类型故障时的动态实验波形。图10a为MMC换流器a相单元的序号1子模块发生故障类型1时,a相环流波形采样值及其卡尔曼滤波器观测值的对比波形,图10b则为对应的子模块电容电压波形。由图可知:为避免系统扰动所造成的监测不准确情况,在故障发生0.03 s后,a相环流现时反馈值与其观测量的差值大于预设阈值,检测系统进入图10b所示的定位环节;当故障检测系统进入定位环节之后,0.05 s后故障子模块与其附属桥臂其余子模块电容电压差值大于预设阈值,并且此差值将逐渐增大,故障检测系统记录处于非正常状态的子模块并反馈至核心处理器,以完成控制系统整个故障检测工作。图10c~10f分别为故障类型2、3对应的系统动态环流波形与子模块电容电压波形。由实验结果可知,由于故障类型的差异,故障子模块所吸收的功率大小不同致使其电容电压上升速率不同,所以检测系统完成子模块故障定位工作所需耗时也略微有所区别,但均保持在ms级,在无需停机的前提下,检测动作迅速。

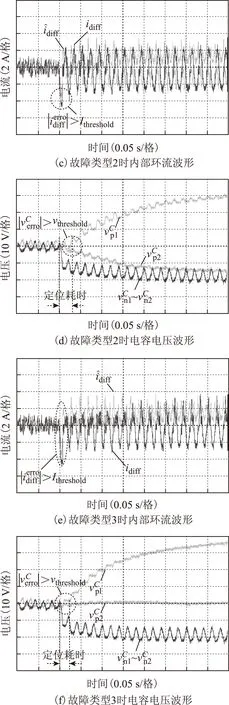
图10 不同故障类型动态实验波形Fig.10 Dynamic experimental waveforms of different fault types
6 结论
MMC换流系统子模块数目庞大、潜在故障点较多,如何能够快速检测出系统处于故障状态并定位故障位置是确保MMC换流系统安全运行所急需解决的问题。本文以监测系统内部状态为出发点,引入扩展卡尔曼滤波算法,提出了一种基于扩展卡尔曼滤波技术的三相MMC换流器故障检测策略。仿真与实验结果表明,所提故障检测方法能够在系统正常运行下监测,故障时无需停机即可快速检测并定位,耗时短、运算量小、易于工业应用。基于扩展卡尔曼滤波MMC换流器故障检测方法作为一种针对MMC新型故障检测技术,为高压大功率多电平换流器故障检测方法提供了新思路。
[1]王建华,张国钢,耿英三,等.智能电器最新技术研究及应用发展前景[J].电工技术学报,2015,30(9):1-11.
Wang Jianhua,Zhang Guogang,Geng Yingsan,et al.The latest technology research and application prospects of the intelligent electrical apparatus[J]. Transactions of China Electrotechnical Society,2015,30(9):1-11.
[2]Saeedifard M,Iravani R.Dynamic performance of a modular multilevel back-to-back HVDC system[J].IEEE Transactions on Power Delivery,2010,25(4):2903-2912.
[3]蒋冠前,李志勇,杨慧霞,等.柔性直流输电系统拓扑结构研究综述[J].电力系统保护与控制,2015,43(15):145-153.
Jiang Guanqian,Li Zhiyong,Yang Huixia,et al.Research review on topological structure of flexible HVDC system[J].Power System Protection and Control,2015,43(15):145-153.
[4]Ichikawa F,Suzuki K,Nakajima T,et al.Development of self-commutated SVC for power system[C]//IEEE Power Conversion Conference,Yokohama,1993:609-614.
[5]Gnanarathna U N,Gole A M,Jayasinghe R P.Efficient modeling of modular multilevel HVDC converters (MMC) on electromagnetic transient simulation programs[J].IEEE Transactions on Power Delivery,2011,26(1):316-324.
[6]Saeedifard M,Iravani Reza.Dynamic performance of a modular multilevel back-to-back HVDC system[J].IEEE Transactions on Power Delivery,2010,25(4):2903-2912.
[7]Debnath S,Qin J,Bahrani B,et al.Operation,control,and applications of the modular multilevel converter:a review[J].IEEE Transactions on Power Electronics,2015,30(1):37-53.
[8]黄守道,彭也伦,廖武.模块化多电平型变流器电容电压波动及其抑制策略研究[J].电工技术学报,2015,30(7):62-71.
Huang Shoudao,Peng Yelun,Liao Wu.Study of capacitor voltage fluctuation and its suppression for modular multilevel converter[J].Transactions of China Electrotechnical Society,2015,30(7):62-71.
[9]敬华兵,年晓红,龚芬.MMC子模块元件短路故障机理及其新型保护策略[J].电工技术学报,2015,30(3):21-27.
Jing Huabing,Nian Xiaohong,Gong fen.Fault mechanism and novel protection strategy of mmc sub-module component short-circuit[J].Transactions of China Electrotechnical Society,2015,30(3):21-27.
[10]Qin J,Saeedifard M.Predictive control of a modular multilevel converter for a back-to-back HVDC system[J].IEEE Transactions on Power Delivery, 2012,27(3):1538-1547.
[11]Liu H,Loh P C,Blaabjerg F.Review of fault diagnosis and fault-tolerant control for modular multilevel converter of HVDC[C]//Conference of the IEEE Industrial Electronics Society,Vienna,2013:1242-1247.
[12]Hassanpoor A,Ilves K,Norrga S,et al.Tolerance band modulation methods for modular multilevel converters[J].IEEE Transactions on Power Electronics,2013,30(1):1-10.
[13]张建坡,赵成勇,孙海峰,等.模块化多电平换流器改进拓扑结构及其应用[J].电工技术学报,2014,29(8):173-179.
Zhang Jianpo,Zhao Chengyong,Sun Haifeng,et al.Improved topology of modular multilevel converter and application[J].Transactions of China Electrotechnical Society,2014,29(8):173-179.
[14]Khomfoi S,Tolbert L M.Fault diagnosis and reconfiguration for multilevel inverter drive using AI-based techniques[J].IEEE Transactions on Industrial Electronics,2007,54(6):2954 - 2968.
[15]李探,赵成勇,李路遥,等.MMC-HVDC子模块故障诊断与就地保护策略[J].中国电机工程学报,2014,34(10):1641-1649.
Li Tan,Zhao Chengyong,Li Luyao et al.Sub-module fault diagnosis and the local protection scheme for MMC-HVDC system[J].Proceedings of the CSEE,2014,34(10) :1641-1649.
[16]Shao S,Wheeler P W,Clare J C,et al.Fault detection for modular multilevel converters based on sliding mode observer[J].IEEE Transactions on Power Electronics,2013,28(11):4867-4872.
[17]Huang S,Tan K,Lee T H.Fault diagnosis and fault-tolerant control in linear drives using the kalman filter[J].IEEE Transactions on Industrial Electronics,2012,59(11):4285-4292.
[18]Bavdekar V A,Deshpande A P,Patwardhan S C.Identification of process and measurement noise covariance for state and parameter estimation using extended Kalman filter[J].Journal of Process Control,2011,21(4):585-601.
[19]裘鹏,章姝俊,黄晓明,等.MMC-HVDC系统中阀侧交流母线故障保护策略研究[J].电力系统保护与控制,2014,42(19):150-154.
Qiu Peng,Zhang Shujun,Huang Xiaoming,et al.Research on the protection strategies of internal AC bus fault based on MMC-HVDC[J].Power System Protection and Control,2014,42(19):150-154.
[20]曹晓冬,谭国俊,王从刚,等.三相PWM整流器模型预测虚拟电压矢量控制[J].中国电机工程学报,2014,34(18):2926-2935.
Cao Xiaodong,Tan Guojun,Wang Conggang,et al.Model predictive virtual voltage vector control for three-phase PWM rectifiers[J].Proceedings of the CSEE,2014,34(18):2926-2935.
[21]朱玲,符晓巍,胡晓波,等.模块化多电平变流器HVDC系统的模型预测控制[J].电力系统保护与控制,2014,42(16):1-8.
Zhu Ling,Fu Xiaowei,Hu Xiaobo,et al.Model predictive control of modular multilevel converter for HVDC system[J].Power System Protection and Control,2014,42(16):1-8.
A Novel Fault Diagnosis Strategy of MMC System Based on EKFA
Yin ShiTan Guojun
(School of Information and Electrical EngineeringChina University of Mining and Technology Xuzhou221116China)
The modular multi-level converter(MMC),with the advantage of modularization,has becoming the core topology under the condition of high voltage and power.The diagnostic technique for common sub module faults in the MMC system directly affects the security and stable operation of the system.On the foundation of analyzing the MMC discrete mathematical model and the internal state change when sub-module power unit malfunctions,a novel fault diagnosis strategy for the MMC based on the extended Kalman filter algorithm(EKFA) is proposed to quickly determine whether the system is in a fault condition through observing the internal circular current state of the system.Firstly,the EKF equations are built referring to the discrete mathematical model.Secondly,the discretion mechanism and positioning method of the fault diagnosis system are built.Lastly,the comparative analysis of simulation and experiment is done under different fault conditions of sub-modules to verify the feasibility and effectiveness of the fault diagnosis strategy mentioned above.The experimental results show that the fault diagnosis strategy proposed in this paper can quickly determine the fault state and locate the fault location,and can therefore improve the safety performance of the MMC system.
Modular multi-level converter,extended Kalman filtering algorithm,fault state analysis, monitoring mode,positioning mode
江苏省研究生培养创新工程(KYLX_1380)和江苏省自然科学基金(BK20140204)资助项目。
2015-05-19改稿日期2015-08-15
TM46
殷实男,1990年生,博士研究生,研究方向为多电平换流器控制技术。
E-mail:yinshicumt@163.com(通信作者)
谭国俊男,1962年生,教授,博士生导师,研究方向为电力电子与电力传动。
E-mail:gjt@cumt.edu.cn