安全车距预警装置设计
2016-11-16德州学院汽车工程学院曹文冠于士军
德州学院汽车工程学院 曹文冠 于士军
安全车距预警装置设计
德州学院汽车工程学院曹文冠于士军
针对当前汽车追尾事故频发的现象,设计了一种汽车安全车距预警装置,此装置通过激光测距雷达检测跟车距离,传感器判断汽车行驶状态。智能控制单元根据两车之间的距离及车辆的行驶状态智能地制定出相应的预警和规避措施,从而减少追尾事故的发生。
安全车距;自动检测;预警;规避
1 前言
近几年随着人们生活质量的不断提高,私家车的数量也逐渐增多,导致道路交通拥堵现象十分严重,从而也导致了大量交通事故,其中追尾事故约占交通事故的1/10。人们不能及时控制车速以及人操作反应时间的延迟是造成这些问题的主要原因。为解决这些问题,安全车距预警装置设计逐渐成为汽车安全领域的研究热点。此装置通过雷达系统、信号处理技术、现代传感技术探测车辆前方的危险目标,帮助驾驶员将行车危险和事故发生的可能性降到最低,防患于未然。现代智能技术的应用,有效地降低了交通事故的发生数量,但仍然需要驾驶谨慎,才能将危险降到最低。
2 装置总体设计
2.1总体方案
目前测距的雷达主要有激光测距雷达、微波测距雷达等。在汽车上应用较为广泛的激光测距雷达可分为非成像式激光雷达和成像式激光雷达。激光测距雷达有测量时间短、量程大、精度高等优点。
安全车距预警装置由若干测距雷达、传感器和车距控制单元组成。速度测量模块由传感器组成,把车辆的行驶状况传送到速度计算单元。车距测量模块由测距雷达组成,把车辆与前方车辆、人及障碍物的距离信息传送给车距计算单元。然后通过车距智能控制单元的分析处理,控制车辆速度,防止追尾事故的发生。

图1 系统总体结构图
2.2两车车距的测量方法
激光雷达测距装置的工作原理有连续波和脉冲波两种,此装置采用激光测距的脉冲波方式。激光雷达工作时,发射机向空间发射一串重复周期一定的高频窄脉冲。如果在电磁波传播途径上有目标存在,那么激光雷达就会收到由目标反射回来的回波。由于回波往返于目标与雷达之间,我们知道电磁波的能量是以光速传播的,设目标距离为S,则传播距离等于光速乘以时间间隔t,即S=Ct/2(C为光速C=300000000m/s)。
2.3速度传感器
当汽车工作时,速度传感器将会及时获取车辆的行驶状态,包括车速、发动机转速等数据,然后将这些信息传递到车距智能控制单元。目前应用最多的两种车速传感器是磁电式及光电式传感器。通常安装在驱动轿壳或变速器壳内,车速传感器信号线通常装在屏蔽的外套内,这是为了消除高压电火线、车载电话及其他电子设备产生电子或及射频干扰,保证各电子工作单元正常工作。
2.4预警装置的车载状态
预警装置的车载状态示意图,如图2所示,装置结构由预警装置、信息处理模块、雷达镜头及调节装置、车速传感器、强制刹车装置等组成。各组件通过信息处理组的调控,协调运行,保证了整个装置的灵敏性、功用性。以前方车辆的距离和汽车本身的车速为基础,系统每秒进行50次计算,从而确定汽车的行车环境。
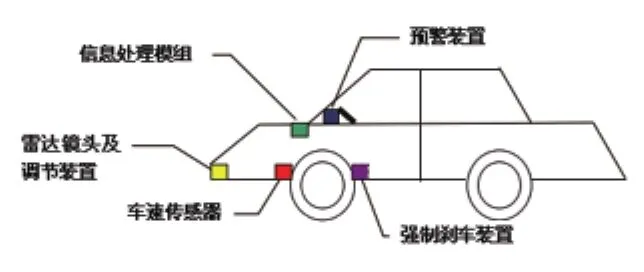
图2 预警装置的车载状态
3 防碰撞控制策略
车距智能控制单元接收速度计算单元和车距计算单元的信息,然后通过智能分析处理,根据不同的行车环境,制定出不同的控制策略。
车辆在道路上行驶时,与其他行驶的车辆有一定的车距,当车距大于某一固定值时,车辆可正常行驶,不会受到外界干扰,当车距小于这一固定值时,车辆就会受到外界条件的限制,影响正常行驶,本文将这一临界车距称为安全临界车距。
3.1目标危险等级分类
根据行车环境的不同,道路上的临近车辆可分为危险目标、威胁目标、潜在威胁目标、非威胁目标(如图3所示)。危险目标一般来自本车道内且车距小于安全临界距离的车辆,对车辆安全行驶构成极大威胁,可能随时会威胁到驾驶员及乘客的人身安全。威胁目标一般来自临近车道且行车间距较小的车辆和本车道内行车间距较小但大于安全临界车距的车辆,对车辆造成一定威胁,但还不会威胁到驾驶员的人身安全。潜在威胁目标一般与本车有一定的间距,如果没有突发状况或行车环境突然改变,不会影响车辆行驶。非威胁目标与本车相距较远,不会影响车辆的正常行驶。

图3 汽车行驶环境模拟图
3.2信号处理及控制
控制部分检测到威胁车辆行驶的信号出现时,汽车可自动实行预警及紧急规避措施。根据目标危险程度的不同,车距智能控制单元将实行不同的控制策略,这样不仅最大限度提高了驾驶员的驾驶愉悦性,还能及时预防事故的发生。报警软件设计如图4所示。
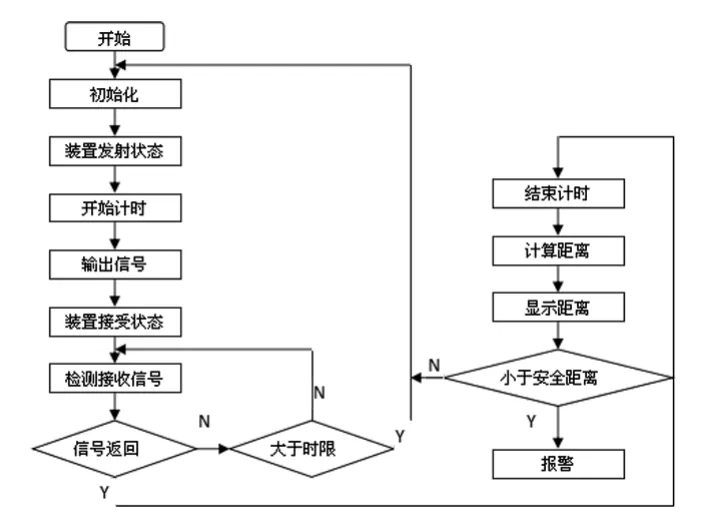
图4 控制策略软件流程图
a.安全控制策略。针对非威胁目标,两车之间车距较大,系统认为此时的行车环境是安全的,不会影响驾驶员的正常驾驶,实行安全控制策略。
b.报警控制策略。针对潜在威胁目标,系统认为此时的驾驶环境不能保证绝对安全,如有突发状况会影响车辆的行驶。这时系统会提醒驾驶员“谨慎驾驶”同时伴有级别较低的声音报警,实行报警控制策略。
c.减速控制策略。针对威胁目标,系统认为此时的驾驶环境危险,会提醒驾驶员“减速行驶”同时伴有较高级别的声光警报,这时车距小于安全临界车距,系统判定当前汽车行驶环境非常危险,发生事故的可能性较大,实行减速控制策略。
d.制动控制策略。针对危险目标,系统认为此时的驾驶环境发生事故的可能性非常大,此时系统会提醒驾驶员“紧急制动”并伴随高等级的声光警报,且同时车辆自动紧急制动,直到车辆脱离危险为止,实行制动控制策略。
4 结语
汽车安全预警装置,是一个意外事故预防和缓和的驾驶辅助装置。利用技术手段分析车道、周围车辆的状况及驾驶环境信息,一旦驾驶员出现驾驶疲劳及精神涣散、汽车出现无意识的车道偏离及汽车间距过近存在追尾可能时,能够主动给予驾驶员预警及自动采取紧急制动措施,旨在预防交通事故的发生,保护驾驶员及乘客的人身安全。
[1]胡寿松.制动控制原理[M].北京:科学出版社,2007.
[2]钟勇,姚剑峰.现代汽车的四种测距方法[J].汽车工业研究,2001(2).
[3]张毅.自动检测技术[M].北京:化学工业出版社,2005.
[4]吴闯,张雄,卢亚玲.车辆安全距离智能控制与自刹车系统. 2013.
[5]宋保林,周汽一.汽车主动防撞系统的规避控制研究.2014.
[6]程自珠,吴佳琳,周炳峰.汽车防碰撞安全系统研究.2009.