PID参数工程整定方法研究
2016-11-16许雪
许雪
(天津渤天化工有限公司计控部,天津 300480)
PID参数工程整定方法研究
许雪
(天津渤天化工有限公司计控部,天津 300480)
本文分析了PID控制模型中比例积分微分的作用,介绍了传统PID参数整定的方法,并总结了PID参数经验整定方法,应用该方法对碱液降膜蒸发流量液位串级控制系统主调和副调PID参数进行调整,并取得了较稳定的控制效果。
PID控制;串级控制;经验试凑法
PID控制即比例、积分、微分控制,广泛应用于工业生产的仪表控制领域,是一种以消除偏差为目的的线性控制方式,PID控制器结构简单,参数灵活,易于调整,在单元组合仪表控制转变成集散控制系统的今天,仍然发挥着巨大的作用。
1 PID控制器模型
常规PID控制器系统框图见图1,系统主要由PID控制器、执行器和被控对象组成。作为一种线形控制器,根据设定值和输出值构成偏差,按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
其中:
e(t)=r(t)-y(t)
PID控制器的控制规律为:
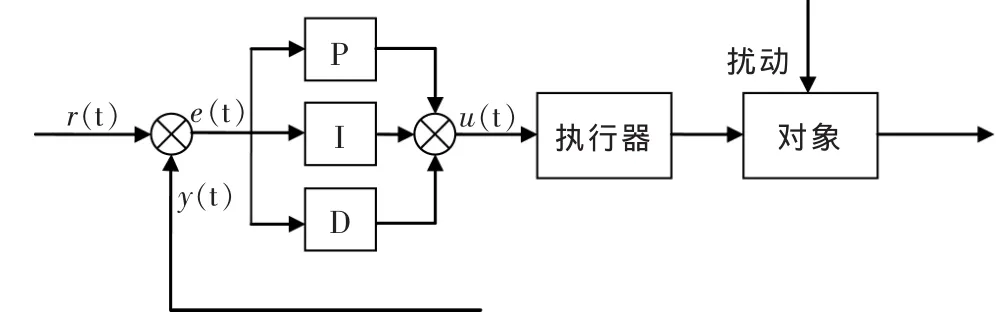
图1 PID原理图

式中:r(t)为给定量;y(t)为被控量;e(t)为给定量与被控量的差值;u(t)为调节器输出;Kp为比例系数;TI为积分时间;TD为微分时间。
比例的作用是减小偏差,P及时成比例的反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,减少偏差。当比例P增大时,执行机构动作灵敏、速度快。在系统稳定的情况下,增大P值,有利于减小稳态误差,提高系统的控制精度,但不能完全消除稳态误差。随着P的增大,系统响应过程中的振荡次数会增多。当P值太大时,系统将趋于不稳定;若P值太小,会降低系统的响应速度,执行元件动作缓慢。
积分环节作用是消除余差,提高系统的无差度。积分时间越小,积分作用越强,积分时间太小时,系统将不稳定,振荡次数较多;但积分时间太大时,积分作用对系统性能影响减小,不利于消除系统的稳态误差,控制精度低。
微分环节能反映偏差信号的变化趋势变化速率,并能在偏差信号值变得太大之前,在系统中引入一个超前修正信号,从而加快系统的动作速度,减小调节时间,改善系统的动态性能,提高控制精度。但微分时间不能太大,太大会使系统不稳定,产生振荡。
2 传统PID参数整定方法
(1)动态特性参数法。控制器在开环状态下,施加阶跃信号或脉冲信号,通过系统响应的数据来推算系统参数,进而计算控制器参数。最早的开环PID经验整定方法是z-N整定。其特点是无需建立被控对象的数学模型,通过在现场进行实验而获得给定系统的暂态响应,从而求取K,T,t等参数,适合用于可近似用一阶惯性环节加延迟环节来表示的被控对象。
(2)临界比例度法。也称为z-N闭环整定方法,通过比例控制作用激发出等幅振荡来求取临界增益Kc和临界振荡周期Tc并以此整定参数。该方法基本思想是:系统只投入比例作用,去掉微分和积分作用,给定信号为阶跃形式,逐渐增大比例系数KP,直到系统发生持续等幅振荡,然后记录下系统的I临界振荡周期Tc和使系统发生振荡的临界放大系数Kc,利用上述两个参数代入下式计算就可确定好PID调节器的3个参数。
KP=0.6Kc;TI=0.5Kc;Td=0.125Kc
相对于Z-N开环整定方法,z-N闭环整定方法有不需要断开控制回路和相对受扰动影响较小的优点,在工业上获得了广泛的应用。但使用此方法时需使系统处于等幅振荡状态,所以应考虑被控过程和执行器的承受问题。
(3)衰减曲线法。先将积分时间置于最大值,微分时间置于最小值,然后让设定值的变化作为干扰输入,逐渐改变比例系数,观察系统的输出响应曲线。按照过渡过程的衰减情况改变比例系数的值,直到系统出现4∶1或10∶1的衰减振荡,记下此时的比例系数和衰减振荡周期Ts,再根据相应公式整定参数。
3 工业现场经验原则
(1)理论上液位不需要微分作用,但在液位计出现不稳定波动时可以加微分,流量控制系统中比例度P可以增大到200,而在温度控制系统积分时间可以达到1 000 s以上。
(2)PID参数调整过程中,若出现等幅震荡或发散,必然有比例或积分作用强,可以适当减小比例度或增大积分时间,减小比例和积分作用。
(3)执行机构的选择要合理,一般阀的50%~70%开度时能稳定控制,若开阀10%就出现流量或液位的大幅波动,说明阀的选型不合理。
4 降膜蒸发碱液液位流量串级控制PID参数整定
理论上液位Ⅱ效蒸发器的液位自电解液管进入,浓缩后流出至Ⅰ效蒸发器,若使液位LC502稳定在23%,则进液出液要动态平衡,即进液流量=出液流量+蒸发掉的液体,使用串级控制,液位LC502控制流量FC503,流量FC503控制调节阀LV502,从而消除了流量的滞后,见图2。

图2 蒸发工序NaOH液位流量串级控制
串级控制系统PID参数的整定,采用的是2步整定法。先不考虑外环,内环为单回路PID控制,在内环加阶跃信号,调整内环PID参数,看如何能得快速稳定在设定值;再把主调PID串级连上,在外环加阶跃信号,调整外环PID参数,看如何能得到稳定曲线。在实际应用中,先把副调节器投入自动,主调断开,按照单回路的方法整定副调PID参数,再把主调节器投入自动,形成串级控制,整定主调PID参数。
如果采用衰减曲线法,将主调比例度固定在100%,逐渐减小副调比例度,直到系统出现4∶1的衰减振荡,记下此时的比例系数和衰减振荡周期T2s,再逐渐减小主调比例度,直到系统出现4∶1的衰减振荡,记下此时的比例系数和衰减振荡周期T1s,根据相应公式整定参数见图3。
从图3可以看到,当工况产生波动时,液位LICA-0502小幅上涨,控制器迅速调节流量FICA-0503,使流量大幅降低,阀位减小(FICA-0503.MV),由于阀是气关阀,所以MV增大,使LICA-0502稳定在23%附近。调整的PID参数可以实现对液位的稳定控制。
Study of PID parameters adjust method
XU Xue
(Tianjin Botian Chemical Co.,Ltd.,Tianjin 300480,China)
This article analyzes the effect of proportion,integrate and differential control in the PID control model,introduces traditional PID parameter tuning methods,and summarizes the PID parameter empirical tuning methods,depending on the method of falling film evaporator flow level cascade control system,the main theme and the sub-tune PID parameters can be adjusted,the result indicates that the System can control the process of production smoothly.
PID control;cascade control;empirical tuning method
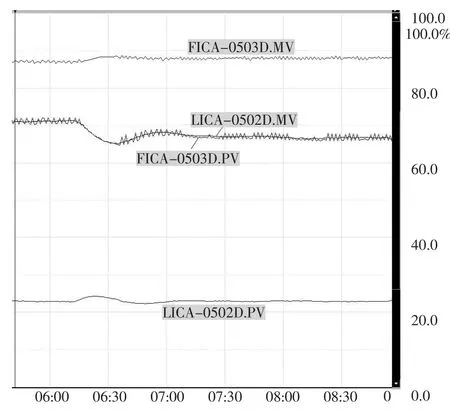
图3 控制效果
TM762
B
1009-1785(2016)09-0044-02
2016-07-17
