混成时空Petri网的CPS实时事件模型*
2016-11-15谭朋柳汪亚亚
谭朋柳, 汪亚亚, 朱 明
(南昌航空大学 软件学院,江西 南昌 330000)
混成时空Petri网的CPS实时事件模型*
谭朋柳, 汪亚亚, 朱 明
(南昌航空大学 软件学院,江西 南昌 330000)
在分析网络物理系统(CPS)特点的基础上,提出了一种新的CPS体系结构,并对事件进行形式化定义。提出了一种新的CPS物理实体的形式化建模方法。在Petri网的基础上引入时空因素和连续变量,构造了混成时空Petri网(HSPN)模型,使其不仅能够描述物理实体逻辑和时间层次的行为,而且能够描述物理实体位置变迁所引起的状态变化。将其应用于实时事件CPS模型设计,以医疗控制系统为例,分析建模方法的可行性。
混成时空Petri网(HSPN); 网络物理系统(CPS); 实时事件模型; 体系结构
0 引 言
网络物理系统(CPS)是一种融合计算、通信与控制的大型复杂实时反馈系统[1],是从根本上提出解决信息空间与物理世界的互联互通问题的方法[2]。它强调通过与环境的实时交互来实现或扩展系统功能,以安全、可靠和实时的方式来控制物理实体[3]。能够达到实时感知和动态控制物理环境的CPS[4]具有非常广泛的应用前景[5]。但是,CPS在具备强大功能的同时,其对实时性以及时间、空间相结合等特性的要求使得CPS系统建模与验证成为一项巨大挑战。
国内外已经有很多学者在CPS建模方面发表了一些研究成果,例如:Lee E A重点分析了CPS建模过程所面临的并发性、实时性及异构性等各项挑战;Lin J提出一种语义多智能体的CPS模型结构;Jeff C提出了一种基于模型的CPS设计方法[6];Bujorianu C分析了CPS关于逻辑层面的一种建模方法[7];Facchinetti T则分析了CPS时间层面的建模方法[8];朱敏等人提出了一种基于微分动态逻辑的CPS建模方法[9]。在CPS建模的研究方向中,基于事件驱动的模型设计方法具有功耗小、开销低、移植性好等优点,但目前其在语义一致性、时间和并发行为描述等方面还需进一步研究。文献[10]提出了一种基于对象和状态的CPS事件模型;文献[11]提出了一种分层的时空事件模型;文献[12]提出一种自适应离散事件模型;文献[13]提出基于物理状态的事件模型;Tan Ying提出一种时空事件模型的概念和一种基于格的事件模型,为CPS定义了初步的事件描述结构[14,15]。
随着对CPS[16]逐渐深入的研究,迫切需要一种严谨、可靠的建模方法。因此,对CPS建模方法的尝试性研究是非常必要的。本文为了解决CPS固有属性的要求以及对系统模型实时性的保证,针对经典Petri网中的问题集成Petri网与时间Petri网,同时加入空间因素设计出混成时空Petri网(hybird spatial-temporal Petri net,HSPN),用于CPS实时事件模型的描述与分析。
1 CPS体系结构
本文提出了一种新的合理的CPS体系结构,其结构示意图如图1所示,由以下几个部分构成:
传感器网络(sensor network):由若干传感器节点(sensor node)及汇集节点(sink node)组成。传感器节点会生成相应的CPS简单事件并将事件传给汇集节点,汇集节点则会产生相应的融合事件,并将事件消息发送到控制中心。
控制中心(control center):即控制服务器,负责根据事先定义的逻辑对事件进行组合产生更复杂的复合事件,并根据事件信息产生相应的控制命令。同时,控制中心会将事件信息及控制命令发布给信息中心。
信息中心(information center):即数据服务器,主要用于存放整个系统的各种事件信息。
执行器网络(actuator network):由若干执行器单元和控制节点组成,控制节点负责接受并执行控制中心发来的控制命令,以达到改变物理对象的目的。
用户终端(user terminal):包括手机、笔记本、桌面计算机及特定终端设备等,负责提供用户与CPS之间的接口。
CPSRTnet:即CPS实时网络,用于连接系统其它各部分,为系统提供实时网络服务,保证信息的实时传输。
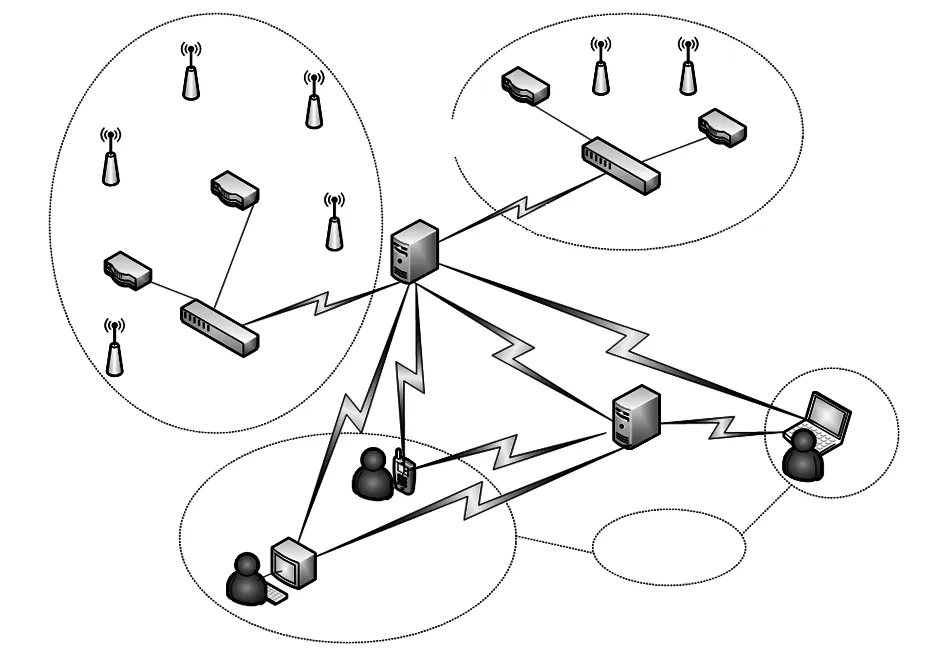
图1 CPS体系结构Fig 1 CPS architecture
2 CPS实时事件模型
2.1 物理实体建模
在CPS实时事件模型中,以下简称事件模型,每个物理实体必须具备一些基本特征:
1)具有系统中唯一的身份ID,以区别其他物理实体。
2)具有一定的空间属性与非空间属性,空间属性指物理实体在系统统一坐标系下的坐标位置或系统中的区域位置。非空间属性指实体所处的状态,例如:静止,移动,空闲,忙碌等。
3)感知设备具备感知环境信息的能力,并能通过网络媒介将信息发送给信息处理单元。
4)执行设备能够接收信息处理设备通过网络媒介传输来的控制指令,并依据指令正确到达目的地来改变物理环境。
通过对物理实体的抽象来构造物理实体类,这里将物理实体类(entity class)定义为一个三元组
EnC=(ECid,CP,OP)
ECid指物理实体类的ID,CP指这类物理实体的属性集合,OP指这类物理实体的行为集合。
每一个物理实体都属于一种物理实体类,每一个物理实体都是物理实体类的一个实例。这里将物理实体(Entity)定义为一个五元组
En=(Eid,EnC,EP,EOP,HT)
式中Eid为物理实体的ID,EnC为该物理实体所属的物理实体类,EP为该物理实体的属性集合,EOP为该物理实体的行为集合,HT为该物理实体所处的混成时空Petri网。
2.2 事件消息建模
1)事件分类
根据CPS事件所包含属性的不同,可以将CPS事件分成三种:
简单事件(simple event)Es:由传感器节点产生,指单一物理属性P超出一定限度而直接引起的事件。
融合事件(fused event)Ef:是指汇集节点将不同传感器节点对同一被监控对象所采集到同一物理属性的简单事件进行融合,或将同一传感器节点对同一监控对象在不同时间采集到的同一物理属性的简单事件进行融合后产生的融合事件。
复合事件(composite event)Ec:是指由控制中心将不同的事件进行组合而产生的复杂事件。
2)事件属性形式化
由于CPS是一个基于事件的系统,本文从事件的固有属性出发,同时考虑到事件组成、空间分布等特性,设计出新的事件表示方法。将事件(event)E表示为一个八元组
E={e,P,T,L,TO,LO,O,w}
e=(eid,t),eid代表事件的ID,在生成事件时同时生成,是事件在整个系统中的唯一标识。t表示事件类型,也可以体现在E的下标处。
P代表事件的属性,是一个集合的形式,P={p1,p2,…,pn}。T代表事件生成的时间。T=[t1,t2],当t1=t2时为时间点事件,t2>t1时为时间段事件。L代表事件生成的地点。L=[(x,y,z),r],(x,y,z)代表事件发生的三维地点,r代表事件发生的范围半径,r=0时为点事件,r>0时为区域事件。TO代表观察者发现事件发生的时间,TO=[to1,to2],当to1=to2时为时间点事件,to2>to1时为时间段事件。LO代表观察者发现事件发生的地点,LO=[(xo,yo,zo),ro],(xo,yo,zo)代表事件发生的三维地点,ro代表事件发生的范围半径,ro=0时为点事件,ro>0时为区域事件。O代表观察者,即发现事件发生的传感器节点。w代表事件的权重值来体现事件的实时级别,会影响到事件的调度与处理。
3 混成时空Petri网
混成时空Petri网还必须具备许多新属性才能对CPS进行建模:
1)物理实体在时空Petri网中抽象为系统资源,因此,可以用令牌的形式来表示物理实体。传统的Petri网只有一种令牌,混成时空Petri网须对令牌进行分类,以一定的形式表示不同物理实体的存在。
2)混成时空Petri网须能够表示物理实体所处的位置区域,这是引入空间因素最基本的要素。
3)混成时空Petri网须能够正确描述物理实体的移动过程,物理实体在混成时空Petri网中以令牌的形式表示,则可以通过令牌的转移来描述物理实体的移动过程。
4)混成时空Petri网须能够表示离散变量的变化。
通过分析上述问题,对于Petri网进行拓展,最后得到混成时空Petri网模型。
定义一个混成时空Petri网为一个八元组
HSPN=(S,T,F,MO,xo,f,I,A)
式中S为有穷、非空库所集,表示为圆形节点,T为有穷、非空变迁集,表示为方形节点,F为库所与变迁之间的有向弧集合,M为变迁过程中令牌在各个库所的分布情况,MO为HSPN中的令牌初始分布状况,x为HSPN中连续变量,xo为初始的连续状态矢量,f为定义在库所集上的连续变量的向量场,I为定义在变迁上的时间区间函数,[t1,t2]为变迁完成的时间要求,A为定义在库所集上的空间位置信息,可以用区域信息或坐标信息表示。
4 实例验证—医疗控制系统
本文采用医疗系统中的病房管理部分作为实例环境,医疗控制系统中可以通过对应的传感器设备及时感知到系统中的物理实体位置及其状态信息,用于实时监控整个系统。医疗控制系统的场景如图2所示。
该系统中的物理实体分别有病人、医生、护士、医疗设备,其对应的传感器设备则属于传感器实体类,可形式化为Sensor(Sensori,CP(state,Area,move,stop),OP(coordinate))。
病人、医生、护士和医疗设备则属于一般物理实体类,形式化为Thing(Thingi,CP(state,Area,move,stop),OP(coordinate))。
其中,state为物理实体的状态信息,Area为物理实体所处的地理位置,在实例中用0,1,2,3,4,5分别为服务中心和5个病房的区域位置信息。coordinate表示物理实体的行为协调信息。
各个物理实体分别定义为:
传感器实体:(sensori,Sensor,EP(work,close,lowbattery,Area,move),EOP(coordinate),HT)
病人实体: (pati,Thing,EP=(rest,needdoctor,neednurse,Area,move),EOP(coordinate),HT)
医生实体: (doci,Thing,EP=(idle,treatment,Area,move),EOP(coordinate),HT)
护士实体: (nuri,Thing,EP=(idle,busy,Area,move),EOP(coordinate),HT)
医疗设备实体: (medi,Thing,EP=(work,close,Area,move),EOP(coordinate),HT)
其中,EP为物理实体的属性集合,HT为医疗控制系统混成时空Petri网模型。

图2 医疗控制系统场景Fig 2 Medical control system scenario
在医疗控制系统中,所有实体具有动态移动性,其各自属性中有位置信息,其中病人的状态受众多因素的影响,因此,设计为一个连续变量xi1,i为病人的ID,当xi1<70时,病人身边需要一位医生或一位护士,当xi1<50时必须在t时间内得到医生和护士的治疗。医疗控制系统中的服务控制中心和5个病房区域分别对应S0~S5六个库所。以S0表示服务控制中心,S1~S5表示病房区域,系统中的令牌初始分布状况如图3所示,S0~S5六个库所的令牌分布情况分别表示为:
传感器令牌分布:sensor (1,1,1,1,1,1);
病人令牌分布: pat (0,1,1,1,1,1);
医生令牌分布: doc (1,1,1,1,0,0);
护士令牌分布: nur (3,0,1,1,1,0);
医疗设备令牌分布: med (1,1,1,1,1,1)。
通过分析得到医疗控制系统的混成时空Petri网模型如图3所示,在该实例模型中假设实例图中所有变迁上所关联的时间要求已知。
医疗控制系统中的场景事件统计如表1所示,由于系统中的病人、医疗设备以及传感器令牌并无变化,因此,系统状态中只表示了6个库所中医生令牌与护士令牌的分布变化情况。在医疗控制系统模型运行中,首先产生群询及状态回复事件。Ef(warn5)表示一个警告事件,控制中心产生事件Es(move5),解除后回复事件Es(normal5)。Ef(danger4)表示一个危险事件,控制中心产生事件Es(move4),解除后回复事件Es(normal4)。每个事件的产生都伴随着令牌的变化。

图3 医疗控制系统HSPN模型Fig 3 HSPN model for medical control system

事件发送方接收方系统令牌状况(医生,护士)备注Es(codi)S0S1~S5{(1,3),(1,0),(1,1),(1,1),(0,1),(0,0)}查看各区域状态Es(state0)S1~S5S0{(1,3),(1,0),(1,1),(1,1),(0,1),(0,0)}各区域发送状态Ef(warn5)S5S0{(1,3),(1,0),(1,1),(1,1),(0,1),(0,0)}5病人状态值<70Es(move5)S0Doc1{(0,3),(1,0),(1,1),(1,1),(0,1),(1,0)}调动1医生Es(normal5)S5S0{(0,3),(1,0),(1,1),(1,1),(0,1),(1,0)}5病人恢复Ef(danger4)S4S0{(0,3),(1,0),(1,1),(1,1),(0,1),(1,0)}4病人状态值<50Es(move4)S0Doc3{(0,3),(1,0),(0,1),(1,1),(1,1),(1,0)}调动3医生Es(normal4)S4S0{(0,3),(1,0),(0,1),(1,1),(1,1),(1,0)}4病人恢复
5 结束语
本文在考虑到CPS中物理实体和时空因素上的动态变化的特性提出一种新的混成时空Petri网模型,将其应用于CPS的建模,并针对CPS中事件消息的时空特性和物理实体的动态变化性设计出一个新的事件表达方式。最后利用基于混成时空Petri网的方法对医疗控制系统实例进行建模,验证了基于混成时空Petri网建模方法的可行性。下一步将针对该建模方法进行改进并与其他建模方法进行比较来验证该建模方法的性能。
[1] Lee E A.Cyber physical systems:Design challenges[C]∥Real-Time Distributed Computing Conf,Washington:IEEE Computer Society,2008:363-369.
[2] 何积丰.Cyber physical systems[J].中国计算机学会通讯,2010,6(1):25-29.
[3] Lee E A.Cyber physical systems:Are computing foundations adequate[C]∥NSF Workshop on Cyber Physical Systems:Research Motivation,Techniques and Roadmap,2006:16-17.
[4] Wolf W.Cyber physical systems[J].Computer,2009,42(3):88-89.
[5] Baheti R,Gill H.Cyber physical systems[C]∥Int’l Conf on the Impact of Control Technology,Washington D C,USA:IEEE,2011:161-166.
[6] Jeff C A.Model-based design methodology for cyber-physical systems[C]∥Proc of the 7th Int’l Conf on Wireless Communications and Mobile Computing(IWCMC),2011:1666-1671.
[7] Bujorianu C.An integrated specification logic for cyber-physical systems[C]∥Proc of the 14th IEEE Int’l Conf on Engineering of Complex Computer Systems,2009:291-300.
[8] Facchinetti T.Real-time modeling for direct load control in cyber-physical power systems[J].Industrial Informatics,2011,4(7):689-698.
[9] 朱 敏,李必信.基于微分动态逻辑的CPS建模与属性验证[J].电子学报,2012,40(6):1126-1132.
[10] Cao X R.Basic ideas for event-based optimization of Markov systems[J].Discrete Event Dynamic Systems:Theory and Applications,2005(15):169-197.
[11] Tan Ying.Spatio-temporal event model for cyber-physical system-s[C]∥Distributed Computing Systems Workshops,Quebec,Canada,2009:22-26.
[12] Ke Y,Li W, Shangping M,et al.An adaptive discrete event model for cyber physical system[C]∥The First Analytic Virtual Integration of Cyber Physical Systems Workshop,San Diego,California,USA,2010:9-15.
[13] Lina C,Hongbin H,Deng S.Research on CPS spatio-temporal event model based on the state[C]∥The 6th International Confe-rence on Computer Science & Education,Super Star Virgo,Singapore,2011:3-5.
[14] Tan Ying.Spatio-temporal event model for cyber-physical system-s[C]∥29th IEEE International Conference on Source,2009:44-50.
[15] Tan Ying.A concept lattic-based event model for cyber-physical systems[C]∥Proc of ICCPS,2010:50-60.
[16] 尹 玲.信息物理融合系统的时间需求一致性分析[J].软件学报,2014,25(2):400-418.
Real-time event CPS model based on hybird spatial-temporal Petri nets*
TAN Peng-liu, WANG Ya-ya, ZHU Ming
(Software Institute,Nanchang Hangkong University,Nanchang 330000,China)
On the basis of analyzing characteristics of cyber physical systems(CPS),propose a new architecture of CPS,and formal definition of events is given.A new formal modeling method of CPS physical entity is proposed and defined.Introduce spatial and temporal factors and continuous variables on the basis of Petri nets,hybird spatial-temporal Petri nets(HSPN)is constructed,HSPN can not only describe behavior of physical entities in logical and time-level,but also can describe change of state caused by position change of physical entities.HSPN model is applied to real-time events CPS model design, and take medical control system as an example,analyze feasibility of modeling method.
hybrid spatial-temporal Petri nets(HSPN); cyber physical systems (CPS); real-time event model; architecture
2015—11—03
国家自然科学基金资助项目(61364023);航空基金资助项目(2013ZD56008) ;江西省教育厅科技项目(GJJ13516)
10.13873/J.1000—9787(2016)10—0032—04
TP 305
A
1000—9787(2016)10—0032—04
谭朋柳(1975-),男,湖北崇阳人,博士,副教授,研究方向为信息物理融合系统、无线传感器网络、实时计算。
