救助船模拟器原型机关键技术研究
2016-11-15张晓磊王志文
陈 卓,张晓磊,熊 伟,王志文
(大连海事大学 船舶机电装备研究所,辽宁 大连 116026)
救助船模拟器原型机关键技术研究
陈卓,张晓磊,熊伟,王志文
(大连海事大学 船舶机电装备研究所,辽宁大连 116026)
针对大风浪条件下救助船操纵训练的要求,有必要开发针对救助船的操纵模拟器。相比于传统的通用船舶模拟器,救助船模拟器原型机系统中引入六自由度平台运动系统,基于UDP协议传输船舶姿态数据实现实时体感模拟功能,可以模拟船舶在大风浪条件下剧烈摇动的操船环境,提高模拟训练的真实感。此外,系统中引入救助作业模拟模块的思想,可以更好地评估、训练船员在恶劣海况下配合其他救助人员完成救助任务的能力,提高执行海上救助任务的成功率与效率。
船舶模拟器;体感模拟;救助船;救助作业模拟
0 引 言
海上救助是一个国家应急保障体系的重要组成部分,通过日常训练提高救助人员的专业素质与经验是一项刻不容缓的社会责任。而其中救助船驾驶员的操船技能对于提高救助效率与成功率有着重要影响,因此救助船员的日常训练具有不言自明的必要性。然而普通的海上实船训练成本高,训练的环境也很难复现海上救援的实际环境[1],而在陆上使用模拟器进行仿真训练具有效率高、成本低的优点。
从 1970 年荷兰 Wageningen 船舶模型实验室的第一台操纵模拟器建成起经过数十年,目前船舶模拟器已经广泛应用于船员的培训与教学,相关技术也得到了不断发展,挪威船级社(DNV)对船舶模拟器也制定了系统的分类标准。然而救助船有别于普通船舶,其出航环境、所执行任务具有很大特殊性,因此相比于普通船舶,救助船模拟器也应具有特殊要求,开发一套针对救助船的操纵模拟器具有重要的现实意义。大连海事大学船舶机电研究所目前开发的 THESIS 型救助船模拟器原型机,应用分布式仿真的思想开发了船舶操纵模块、视景软件模块、虚拟仪表模块、电子海图模块、六自由度运动平台体感模拟模块与救助作业模拟模块。
1 模拟器系统框架
1.1系统设计目标
救助船模拟器除了要满足通用船舶模拟器的视景系统、操纵设备、电子海图/仪表等基本要求外,针对救助船这一特殊对象,还必须要满足以下特殊要求。
首先,飞行、汽车等模拟器由于模拟对象具有较为剧烈的运动变化,为提高真实感需要在系统中引入运动平台实现实时体感模拟[2-3]。而船舶在通常出航环境下运动相对平稳,因此传统船舶模拟器大多完全依靠视景画面的变化给操船者以船舶摇摆的错觉,利用体内平衡使人能够跟随视景画面产生一定的摇摆,并感受到一定程度的眩晕、呕吐等生理反应。挪威船级社在对船舶模拟器的定义与分级中,对于体感模拟也没有明确的要求[4]。但是日本神户大学学者通过实验证明,通过画面运动对人产生的感觉十分有限,在船舶驾驶模拟训练中,通过引入六自由度运动平台复现船舶摇摆,可以让操船者产生生理与心理上无意识的反应,提高训练真实感[5]。而救助船在出航执行救助任务时,多处于恶劣天气海况条件下,此时船舶摇摆非常剧烈。为了训练船员在这种环境中的操船能力,更加有必要在模拟器中引入运动平台,根据解算出来的摇摆角度实时复现船舶姿态,实现体感模拟。
其次,救助船作为救助体系中的一员,并非独立执行航行任务,而是服务于救助作业的开展。因此需要模拟器系统不仅可以模拟船舶的驾驶操作,还需要引入救助作业模拟的思想,将两者结合起来,评价船员的操船表现是否能够配合其他环节高效率地完成救助任务,并根据评价结果进行更有针对性的训练,提高船员的专业技能。
1.2系统整体框架
系统采用分布式的仿真结构,将 4 台执行不同任务的计算机通过千兆网络交换机在局域网内连接起来,进行数据通信。其中视景计算机作为服务器,是系统的核心部分,船舶的运动模型也集成在视景软件中。视景软件通过 RS-232 串口接收操纵设备的操船信号后,经过运动模型实时解算出船舶位姿,并驱动视景画面运动。同时将船舶位姿、状态数据在局域网内采用 TCP/IP 协议发送给仪表计算机、海图计算机、运动平台控制计算机以实现各自的功能。系统框架如图1所示。
2 救助船模拟器关键技术
相比于通用船舶模拟器,救助船模拟器的关键技术主要有基于运动平台的实时体感模拟与救助作业模拟。

图1 系统框架图Fig.1 Framework of system

图2 船员模拟体验原理图Fig.2 Functional diagram of crews' training
2.1运动平台体感模拟
体感模拟是用计算机软件生成特定的激励信号去驱动六自由度运动系统来产生救助船实际运行过程中所具有的运动现象的实时仿真系统。它能提供船舶航行过程中船员所能感受到的动感信息,配合视觉、操纵上模拟的感觉,使得船员能够更加真实的体验船舶在恶劣海况下剧烈摇摆的操船环境。
六自由度平台可以在设计范围内复现空间 6 个自由度的运动,采用并联式结构,其位姿由 6 个电动缸的伸缩量决定,而电动缸的伸缩量又由 6 个电机的旋转角度决定,因此控制平台运动实质为:通过运动控制器向电机伺服驱动器发送特定的脉冲,再由伺服驱动器驱动电机转动。目前系统采用基于 PCI 总线的运动控制卡,该控制卡提供了控制卡初始化、脉冲模式设置、运动控制等大量基于 C++编写的运动控制函数,在编程时不需要了解控制卡硬件电路以及运动计算的细节,调用这些库函数即可实现高精度的控制[6]。六自由度平台运动系统如图3 所示。
体感模拟的要求在于以下 2 点:1)能够真实的按照某型解算结果复现船舶运动;2)是能够尽可能的保持与视景画面运动的同步,即保证平台运动系统对于外部信号的实时跟随性。运动平台系统与视景计算机之间通过以太网连接,基于 TCP/IP 协议进行数据传输,为保证实时性,在传输层采用传输速度快的 UDP协议。

图3 六自由度平台运动系统Fig.3 6-DOF motion platform system
运动平台实时复现对人体感官影响较大的横摇、纵摇 2 个运动。模拟器原型机目前采用的运动平台设计运动范围有限,无法等值复现船舶运动,因此采用等比例缩小的方式,目的在于检验数据发送方式与平台控制系统的响应速度能否满足要求。实验测试平台运动的跟随性曲线如图4 所示,实验结果表明,平台运动复现的实时跟随性可以满足要求。
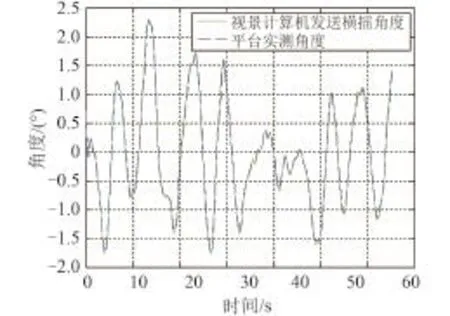
图4 运动平台跟随性曲线Fig.4 Platform's motion following external data

图5 视景软件图Fig.5 Diagram of visual simulation software
2.2救助作业模拟模块
救助作业模拟模块集成于视景软件中,其实质是在系统中除船桥视景之外,单独渲染出一个视点位置、方向可变的视景通道,在这个通道中,进行如撇缆、拖带、灭火等救助作业的可视化仿真。通过这种方式可以直观地评价船员操船配合救助任务执行的能力,以此为根据有针对性地加强其训练项目。
模拟器视景软件基于 Vega Prime 进行开发,它是Multigen 公司开发的跨平台的三维视景仿真开发工具。它将易用的工具和高级仿真功能巧妙地结合起来,从而可使用户简单迅速地创建、编辑、运行复杂的仿真应用[7],而通过其内部的海洋模块也可以十分方便地生成救助船模拟器所需要的虚拟海洋环境[8]。对于救助作业可视化仿真所需要的特殊效果或基本图形元素,无法直接应用 Vega Prime 提供的模块实现,因此需要基于其提供粒子系统或使用 OpenGL 进行混合编程的方式进行二次开发。视景软件如图5 所示。
3 结 语
针对救助船驾驶员训练的特殊要求,本文提出了2 点针对救助船模拟器的关键技术:基于运动平台的体感模拟技术与救助作业模拟模块。通过这 2 项功能的引进,可以更好地评价、训练船员在恶劣海况下操纵船舶配合完成救助任务的能力,以此提高海上救助的成功率与效率。
[1]LIU Xiu-wen,XIAO Fang-bing,JIN Yi-cheng.A prototype of marine search and rescue simulator[C].//Proceedings of International Conference on Information Technology and Computer Science.Kiev: IEEE,2009,1: 343-346.
[2]王辉,陈学森.飞行模拟器六自由度运动平台的仿真研究[J].机械科学与技术,2012,31(5): 778-782.WANG Hui,CHEN Xue-sen.Simulating six-DOF motion platform of flight simulator[J].Mechanical Science and Technology for Aerospace Engineering,2012,31(5): 778-782.
[3]罗竹辉,魏燕定,周晓军,等.六自由度平台车辆运动模拟器变输入洗出算法[J].浙江大学学报(工学版),2013,47(2): 238-243.LUO Zhu-hui,WEI Yan-ding,ZHOU Xiao-jun,et al.Research on variable input washout algorithm for stewart platform vehicle simulator[J].Journal of Zhejiang University (Engineering Science),2013,47(2): 238-243.
[4]DNV.DNV standard for Certification of maritime simulator systems: DNVGL-ST-0033[S].[S.l.]: DNV,2011.
[5]MURAI Koji,HAYASHI Yuji.Evaluation of body sway in artificial ship rolling and pitching[J].International Journal of Emerging Trends in Engineering and Technology,2011,1(1): 1-10.
[6]白林.六自由度电动平台控制系统设计[D].大连: 大连海事大学,2011.BAI Lin.Development of control system for 6-DOF electric platform[D].Dalian: Dalian Maritime University,2011.
[7]胡梓楠,于劲松.基于 MFC 编程框架的 Vega Prime 软件集成技术的研究[J].系统仿真学报,2009,21(14): 4291-4294,4299.HU Zi-nan,YU Jin-song.Research of software integrated technology of Vega Prime based on MFC programming F、framework[J].Journal of System Simulation,2009,21(14): 4291-4294,4299.
[8]董峰,王继州.三维虚拟海洋图像仿真在舰艇视觉中的应用[J].舰船科学技术,2015,37(9): 176-180.DONG Feng,WANG Ji-zhou.Application of 3D virtual ocean image simulation in naval ships vision[J].Ship Science and Technology,2015,37(9): 176-180.
Research on the key technique of rescue ship simulator prototype
CHEN Zhuo,ZHANG Xiao-lei,XIONG Wei,WANG Zhi-wen
(Ship Electromechanical Equipment Institute,Dalian Maritime University,Dalian 116026,China)
In order to adapt the need of simulated training of marine rescue,it is necessary to develop the ship simulator that aimed at rescue ship.Compared with traditional simulator for normal ship,the function of proprioceptive is achieved by introducing a 6-DOF motion platform,and the motion data of rescue ship is transmitted to the platform system based on UDP protocol,by which means the swaying handling circumstance can be simulated to improve the reality of training.Besides the module of rescue operation simulation are introduced into the system,by which the crew of rescue ship can be evaluated and trained better to improve their ability of steering in terrible sea state and working in coordination with other personnel to complete the rescue mission.By this mean the success rate and efficiency can be improved.
ship simulator;proprioceptive;rescue ship;rescue operation simulation
U661.74
A
1672-7619(2016)06-0114-04
10.3404/j.issn.1672-7619.2016.06.023
2015-09-29;
2015-11-05
国家科技支撑课题资助项目(2014BAK05B06);交通运输部建设科技重点资助项目(2013328225080);中央高校基本科研业务费专项资金资助项目(3132014303)
陈卓(1991-),男,硕士,研究方向为虚拟现实、船舶模拟器。
