表面 PIV 在潜航体兴波伴流场测量中的应用
2016-11-15周文进蒋小勤王建中方频捷海军工程大学理学院湖北武汉430033
周文进,蒋小勤,王建中,方频捷(海军工程大学 理学院,湖北 武汉 430033)
表面 PIV 在潜航体兴波伴流场测量中的应用
周文进,蒋小勤,王建中,方频捷(海军工程大学 理学院,湖北武汉 430033)
介绍潜航体兴波伴流场的表面 PIV 测量方法,对表面 PIV 的标定,示踪粒子的选择,背景干扰流场的消除方法以及表面 PIV 测量精度等问题开展分析讨论。实验表明:运用表面 PIV 技术可灵敏地探测到潜航体微弱的 V 型兴波伴流场,该兴波伴流场可以用潜航体的‘源-汇'效应解释。本文采用普通 CCD 数码摄像机以及普通光源摄取表面粒子图像,与传统的激光 PIV 设备相比,不仅经济而且使用方便,测量结果精确可靠,运用表面 PIV 技术测量表面微弱流场的精度可达 0.01 pixel。
潜航体;兴波伴流;表面PIV
0 引 言
潜艇的非声学探测已成为一个热门课题,其中基于潜艇水动力学尾迹特征的探测是其重要的分支,相应的探测手段孕育而生,如海洋内波影响海面毛细波的粗糙度,从而导致微波散射的变化,据此形成了运用合成孔径雷达(SAR)从空中捕捉内波的探测技术。为了准确分析评估潜航体激发的内波对海洋表面的调制作用,在实验室中开展潜航体水面效应的定性或定量的研究,是一个不可或缺的重要环节[1-3]。
20 世纪 90 年代末,马晖扬等[4]在水-盐水、水-柴油 2 种分层的水槽中进行拖曳球的实验,展示了密度突跃层和水面的变形。常煜等[5]基于 RANS 方程和VOF 方法的非定常粘性数值方法,模拟了均匀流体和2 层流体中运动潜艇激发内波的水面效应。张效慈[6]利用 Tuck 方法,数值计算了几种潜艇运动时潜艇尾迹传播到海面时的映波幅值。在 PIV 实验方面,S.I.Voropayev等[7]在雷诺数 Re>104条件下测量表面射流和拖曳尾流的表面旋涡,给出了旋涡大小的涡量判断条件;秦朝峰等[8]利用 PIV 技术,在分层流体自由面下 5 mm 处,探测并计算了流场的分布规律、散度和旋度等;Rottman 和 Broutman[9]在水中分层处撒聚合物粒子,用激光片光照明,利用 PIV 技术对内波场进行研究;姚志崇[10]采用撒聚合物粒子的方法,但使用的是普通白炽灯光源,从垂向方向观测,对小球的尾流激发内波在流体内部的演化规律进行研究。从实验上来说,大多数学者利用 PIV 技术很好地得到了流体内部流场的演化规律,但并没有直接测量水面的流场;陈祥瑞[10]利用线阵 CCD 相机直接拍摄拖曳潜航体兴波,反射光的强度对水面变形非常敏感,通过线阵 CCD 相机对水面扫描获取的是水面各处反射光的强度信息,定性地得到了水面兴波纹理图像及其随速度的演化规律,但未能给出水面兴波波高、表面流场等定量测量结果[11]。
无论是在密度均匀流体还是分层流体中,潜航体的水面效应都属于微弱流场[12-13],线性分层流内波理论预言潜航体激发内波运动会在水面上产生辐聚辐散流,该辐聚辐散流与表面微尺度波的相互作用是微波雷达(SAR)探测内波的物理基础[14-15]。从实验研究的角度目前至少有 2 个问题待解决:1)在均匀流与分层流中潜航体的表面兴波伴流场有无明显的差异;2)如果存在明显差异,就需要定量的测量,给出伴流场的强度与分层流、潜航体特征参数、航速、航深等的关系。运用表面粒子图像测速(简称表面 PIV 或SPIV)技术测量潜航体兴波、以及分层流内波的表面效应的研究尚处于起步阶段,许多问题如示踪粒子如何选择、如何撒布、如何从复杂背景流场中提取微弱的兴波伴流信号等尚待研究。
本文以均匀流体中潜航体兴波伴流场的定量测量为例,介绍 SPIV 在定量测量表面微弱流场、表面微幅波中的应用。
1 实验设备及模型
1.1实验环境及实验水槽
实验在 50 m2左右的实验室中进行,实验前尽量将门窗关上形成密闭空间,室温在 14 ℃~22 ℃,室内空气流动较缓慢。
潜航体兴波伴流场 SPIV 测量实验在一长方体型钢化玻璃水槽中进行,水槽置于实验室中间。水槽长2 400 mm、宽 800 mm、高 700 mm,水深 320~395 mm。实验时在水槽上方架设一面倾斜 45°的镜子,通过镜面反射可以从水平方向拍摄获取垂向观测图像。
1.2模型及拖曳系统
拖曳模型头部为半椭圆形,尾部为细长流线锥形。模型长度为 Lm=200 mm,最大直径 Dm=30 mm,控制塔高度为 Th=13 mm,长度为 Tc=41 mm,控制塔距模型前端为 Td=62 mm,该模型的缩比为 1∶350。实验时,模型距水槽底面高度 L3=295 mm,通过增减水量来调节模型距水面的距离,若无特殊说明,后文中模型距水面(或底面)距离均指拖曳线距水面(或底面)距离。
模型采用微型减速电机驱动,额定电压为12 V。控制电压为 8~18 V 直流可调电源,控制精度为 0.01 V,供电压和拖曳速度成线性关系。电压与拖曳速度的方程如下:

其中 U 为拖曳速度,mm/s;V 为控制电压,V。
为增加拖曳过程中模型的稳定性,在模型控制塔上设置一根带圆孔的引导杆,并且在拖曳线上方在按设一根与之平行且穿过导引杆圆孔的导引线,导引线一端固定在水槽壁上,另一端悬挂装 1 kg 重物使之绷直以稳定模型。拖曳方式分采用有控制塔拖曳方式(T)和无控制塔拖曳方式(NT)2 种。
1.3表面 PIV 测量系统
拍摄系统为一架水平放置的 CCD 相机,利用45°反射镜镜像对水面进行拍摄。相机镜头距镜面反射点 1 970 mm,镜面反射点距水面 770 mm。实验采用的CCD 相机是 Canon PowerShot SD400 IS,分辨率为1 920×1 080,摄像速度为 24 帧/s。将拍摄范围对焦在水表面,采用连续摄像的方式来记录水体表面粒子流动信息,最后截取视频图像进行 PIV 计算。示踪粒子为聚酰胺(俗称尼龙)白色粉末,粒径 150 sm 左右。示踪粒子由于水面张力的作用,在水面成悬浮状态。观测表明:撒布粒子一段时间之后,逐渐出现团聚现象,粒子团的直径大多在 0.5~1 mm 之间。光源系统采用 2 台幻灯投影仪,分别从左右 2 个方向以宽度约100 mm 的片光方式照亮水面上的示踪粒子。在保证拍摄视场内光照度均匀的前提下,尽可能减小背景杂散光的影响。
2 表面 PIV 测量技术
2.1测量原理
悬浮在水面的示踪粒子会随表面兴波伴微弱流场而产生运动,SPIV 测量技术通过图像处理方法,测量表面示踪粒子的运动速度来间接得到水面兴波流场分布。
SPIV 技术和传统 PIV 技术共同点是都采用粒子图像互相关算法计算速度场,计算软件和处理程序具有通用性。本文采用的程序是 J.Kristian Sveen 所编写的MatPIV v1.61,在 Matlab 平台上运行。不同点是 SPIV观测的是飘浮在水面上的粒子运动,传统 PIV 观测的是悬浮在水中粒子的运动。分层流 PIV 测量的一个难点是难以筛选密度和待测剖面密度相等的粒子,导致粒子难以稳定悬浮在理想的待测位置,其优势是通过调节片光源的位置,能测量流体中任意截面的速度场。SPIV 的优点在于粒子受表面张力作用能稳定漂浮在水面,测量表面速度场的精度较高,缺点是受表面张力、有机油污等的影响,粒子的运动跟随性变差。此外,本实验采用的 SPIV 技术使用的是普通 CCD 相机,而非价格昂贵的专业 PIV 相机,所使用的光源也是普通白炽灯光源,而非大功率激光光源,实验成本较低,实验设计更加灵活,简单易行。
2.2背景流场及消除方法
为保证各组实验的独立性,每组实验间隔时间不少于 30 min,然而水槽中的流体不可能处于绝对平静,产生干扰有以下几个原因:
1)水体上下层热对流。水面温度随室温变化较大,水体内部温度变化较小,从而产生冷热部分的相互对流,且属于整个水槽的大范围对流,特别是在新铺水后热对流较为明显。水体稳定之后通常水面与室温相差 5 ℃ 以内,水面与水体内波温差 2℃以内;
2)风压扰动。风压扰动为空气流动引起水面流动,包含室内冷热空气对流和人为扰动;
3)模型启动振荡波干扰。由于拖曳模型从静止状态突然加速,势必会产生扰动波;
4)由于实验室设在 5 楼,高楼的晃动和外界低频振动对水槽的影响。
在实验时,各种干扰因素通常混合在一起,能探测的背景流场强度可达 0.01~0.3 mm/s,运动潜航体兴波伴流场强度与之同等数量级,。
假设干扰因素引起的背景流场与兴波伴流场具有线性叠加性,因此可以尝试直接将测量流场与背景流场相减。反过来说,如果减背景流场能够有效得出实际流场的特征,则也可以说明各流场之间的关系具有线性叠加性。实验表明背景流场形态主要有大尺度漩涡、低频振荡流和表面纹波波动。若背景由多种流场叠加,单纯减掉之前某一时刻的背景不合理,甚至会引起实验后期处理的人为误差,因此通过对减后流场是否符合特征规律来判断背景选取是否合适。图1是减背景前后的对比。其背景场主要为风压扰动的旋涡,背景场与测量场间隔 2 s,因此背景平移量也很小,没有明显的波动现象,且 2 幅背景相减后速度场均方根降低一个数量级,所以这类情况采用减单幅背景场的方法十分有效。后文展示计算结果均为减背景后的速度场,不再加以说明。
2.3测量精度及标定误差评估
2.3.1测量范围和精度评估
SPIV 将图像分割成小块像素查询区域,对每一块查询区域寻找邻域中互相关率最高的查询区,由此确定移动距离。计算结果表明:通过图像处理能够获得的互相关平移距离精度为 0.01 pixel。若取标定系数为0.2 mm/pixel,因此有效精度为 0.002 mm。可推算测量范围为 380 mm×220 mm,标定系数随具体实验条件来确定。
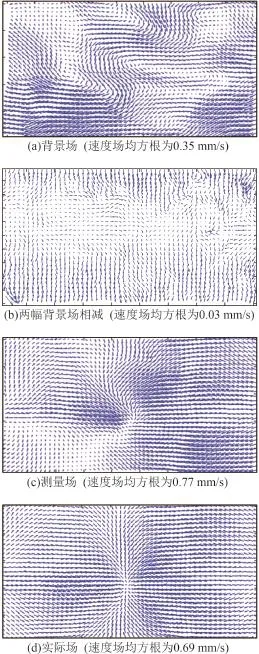
图1 拖曳深度 46 mm,拖曳速度为120 mm/s,拖曳方式NT,速度场空间分辨率为 6.4 mm×6.4 mm,标定系数为 0.19 mm/pixelFig.1 Depth=46 mm,towed speed=120 mm/s,towed model is NT,(1-a)background velocity field,(1-b)substraction between two background fields,(1-c)measured velocity field,(1-d)actual velocity field after background substracted,velocity spatial resolution is 6.4 mm×6.4 mm,comap is 0.19 mm/pixel
速度场空间分辨率为一速度矢量代表实际面积,与查询区大小、重叠率以及标定系数密切相关。表1列举标定系数为 0.2 mm/pixel 的几种查询区和重叠率对应的速度场空间分辨率。实验时能清晰明辨的特征粒子有限,采用较小查询区容易导致计算误差,因此采用大查询区和高重叠率来保证计算准确性和提高分辨率。

表1 标定系数 0.2 mm/pixel 的几种查询区和重叠率对应速度场空间分辨率Tab.1 Velocity spatial resolution under several interrogation regions and overlap with comap=0.2 mm/pixel
2.3.2标定误差评估
严格来说,模型与水面有一定距离,如图2所示,水对光线的折射和相机成像视角会造成标定误差。图中 Lm为实际运动距离,Lm''为观测运动距离,光线从水中进入到空气中的入射角为β,折射角为α,且β<α,设标定系数误差为 δ,经测量,镜头距水面l=2 740 mm,模型深度 h=25~100 mm,水的折射率约为 n=1.3。假设光线从水进入空气不发生折射,用一个不等式来说明标定误差 δ 的范围:

计算误差最大为 3.6%,所以在本实验中予以忽略,更多的是要考虑温度、风压等环境因素带来的影响。
3 测量结果分析

图2 标定误差示意图Fig.2 Error of calibration
本实验采用 SPIV 技术成功的测量了潜航体激发的微弱兴波伴流场。本文使用基于潜深 h 的傅氏数和雷诺数作为无纲量相相似参数,其中 20 ℃淡水中 v 为 10-2cm2/s,U 为航速,g为重力加速度。因此傅氏数范围在 0.086<Fr<0.390,2 550<Re<5 790。在此实验条件下,潜艇所产生的水面兴波波幅十分微弱,肉眼几乎看不见水面的隆起或变形。但由潜艇排水效应所产生的水面流场变化经过SPIV 计算却是十分明显的速度场特征。
图3 所示为 2 种拖曳方式(T 和 NT),深度 50 mm条件下的速度场矢量图。由于拍摄范围有限,quiver画矢量的长度具有相对性,在不同的 2 幅图中,矢量长度并不代表值的大小,同一幅图中矢量长度越长值越大。相机由手动调节缩放,标定系数略有差异。为了显示清晰采用较低速度场分辨率。

图3 深度 50 mm,2 种拖曳模式测量结果展示Fig.3 Depth is 50mm,measured result of two towed models
由于潜艇控制塔高 17 mm,因此控制塔距水面33 mm,在此深度下,控制塔对水面流场的影响十分明显。从图3(a)可看出,在控制塔上方速度场明显加剧。图中用黑色椭圆大致标示出模型所在位置,模型的头部表现为‘源',而尾部表现为‘汇'的特征,模型的周围形成 V 型流场结构。较于 NT 模式,控制塔和模型主体共同产生体积效应,导致控制塔上方流场强度更加强烈。
下面以拖曳方式 T(深度 45 mm,拖曳速度120 mm/s,有控制塔)为例,给出速度场的伪彩色分布图,规定从左往右为 x 轴速度场正方向,从上往下为 y 轴速度场正方向,如图4所示。

图4 h=45 mm,v=120 mm/s,Fr=0.179,Re=3600,拖曳方式为 T,速度场空间分辨率为 3.2 mm×3.2 mm。Fig.4 h=45 mm,v=120 mm/s,Fr=0.179,Re=3 600,towed model is T,velocity spatial resolution is 3.2 mm*3.2 mm.4-a is vector of velocity field,4-b is pcolor image of united velocity field,4-c is pcolor image of velocity_u field if xaxis direction,4-d is pcolor image of velocity_v field if yaxis direction
由图4 可知:1)由于运动模型体积排水效应,头尾处成一对源汇流场,且上下分布对称;2)速度场 v伪彩图为蝴蝶状,模型后方流场成 V 型,是 Kelvin波;3)速度场 u 伪彩图中矩形框内疑似横波波系,肉眼可见 1~2 个横波,速度场 v 伪彩图中矩形框内疑似侧波波系,肉眼可以见两列侧波。
提取图5模型轴线 x 方向和尾迹(图4(d)所示方框内)y 方向的速度,如图5所示。图5(a)中箭头所指的位置推测存在 4 个波峰,对应 4 个横波波系,图5(b)中箭头所指的位置出推测存在 2 个波峰,对应一个散波波系,要采用滤波手段去掉强源汇效应,才能进一步分析。
陈祥瑞等[11]利用线阵 CCD 拍摄拖曳细长回转体的水面兴波,在 Fr=0.28,Re=14 000 条件下,线阵 CCD几乎探测不到表面兴波信息,而 SPIV 技术在 Fr=0.18,Re=3 600 条件下能清晰获取水面兴波伴流场(见图4)。

图5 直线上速度分量变化曲线Fig.5 Change of component of u,v along line in velocity field
4 结 语
本实验主要得出以下结论:
1)SPIV 技术使用普通 CCD 相机、普通白炽灯光源以及聚合物粒子粉末,在低弗洛德数和低雷诺数条件下,能有效的测量出模型运动兴波伴流场的表面流场,可以取代昂贵的专业 PIV 测量系统,也较线阵 CCD的测量能灵敏的兴波信息。采用 64×64 或 32×32 查询区实际计算中发现 SPIV 计算精度能达到 0.01 pixel。速度场空间分辨率与标定系数、查询区大小和重叠率密切相关,通常采用标定系数为 0.2 mm/pixel,由此可计算速度场空间分辨率为 3.2 mm×3.2 mm,实际位移计算精度可达到 0.002 mm,在此速度场空间分辨率下展示出的流场细节构能够满足分析流场特征的需要;
2)背景干扰流场的来源有大范围热对流、风压扰动、启动扰动波,主要扰动来源为风压扰动。在水面的表现形式为大尺度漩涡、低频振荡流、表面纹波波动。假设干扰流场具有线性叠加性,根据实际情况采用减单幅背景的方法能有效减去旋涡背景;
3)列举了 T 和 NT 两种模式,Fr=0.154 和 0.279,Re=3 240 和 5 850 条件下的表面兴波速度场计算结果,定量观测到了表面 V 型波速度场,以及潜航体运动产生的‘源汇'效应。对速度场分量 u 和 v 伪彩图中可以看到速度场分量 v 为蝴蝶状,可探测 2 列侧波,速度场分量 u 中可探测到至少 1 列横波。
今后还将在具体分析水面速度场特征随航速、深度的演化规律以及水面张力的变化对速度场的影响规律。
[1]张军,张效慈,赵峰,等.源于水动力学的潜艇尾迹非声探测技术研究之进展[J].船舶力学,2003,7(2):121-128.
[2]魏岗,戴世强.分层流体中运动源生成的内波研究进展[J].力学进展,2006,36(1): 111-124.
[3]CHEN Y Q,FENG J,ZHU M H.Detection methods of submerged mobile using SAR images[C]//Proceedings of 2005 IEEE International Geoscience and Remote Sensing Symposium.Seoul: IEEE,2005,3: 1717-1720.
[4]马晖扬,麻柏坤,张人杰.分层流体中运动物体与自由面相互作用的实验研究[J].流体力学实验与测量,2000,14(3): 7-11,17.
[5]洪方文,常煜.均匀流中潜艇水下运动表面尾迹的数值模拟[J].船舶力学,2005,9(4): 9-17.
[6]张效慈.潜艇内波尾迹物理场在海面映波量值的确定[J].船舶力学,2005,9(4): 25-30.
[7]VOROPAYEV S I,FERNANDO H J S,SMIRNOV S A,et al.On surface signatures generated by submerged momentum sources[J].Physics of Fluids,2007,19(7): 076603.
[8]秦朝峰,陈旭,于佳.跃层中运动小球产生的内波对表层流场的影响[J].中国海洋大学学报,2009,39(S): 303-310.
[9]ROTTMAN J W,BROUTMN D,SPEDDING G R,et al.Internal wave generation by a horizontally moving sphere at low Froude number[C]//Proceedings of the 25th Symposium on Naval Hydrodynamics,St.John's.Canada: Newfoundland and Labrador,2004.
[10]姚志崇,赵峰,梁川,等.分层流体中拖曳球体尾流及辐射内波试验研究[J].船舶力学,2014,18(11):1275-1283.
[11]陈祥瑞.基于分层流水面CCD影像的运动潜体尾迹结构特征实验及其应用研究[D].南京: 南京理工大学,2014.
[12]马晖扬,麻柏坤,张人杰.分层流体中物体运动尾迹的理论和实验研究[J].中国科学技术大学学报,2000,30(6): 677-684.
[13]魏岗,乐嘉春,戴世强.有限深度两层流体系统中运动点源生成的内波及其与自由面的相互作用[J].应用数学和力学,2003,24(9): 906-918.
[14]HUDIMAC A A.Ship waves in a stratified ocean[J].Journal of Fluid Mechanics,1961,11(2): 229-243.
[15]GASPAROVIC R F,APEL J R,KASISCHKE E S.An overview of the SAR internal wave signature experiment[J].Journal of Geophysical Research: Oceans (1978-2012),1988,93(C10):12304-12316.
The application of surface PIV in the measurement of wave making of underwater moving body
ZHOU Wen-jin,JIANG Xiao-qin,WANG Jian-zhong,FANG Pin-jie
(Department of Physics,Naval University of Engineering,Wuhan 430033,China)
This paper is mainly to introduce an experimental method for measuring wave making of underwater moving body by PIV.Apart from of analysing the principle of Surface-PIV,defining coordinate,and how to eliminate interference from background,the precision of Surface-PIV is also analysed in detail.Experiment show that 'V' type wave and sourcesink effect are successfully detected.Comparing with the traditional PIV,Surface-PIV is not only economical and practicable under the laboratory conditions,but also accurate and reliable.Effective accuracy of Surface-PIV can reach 0.01pixel.
underwater moving body;wave making;surface PIV
P714.3;O353.2
A
1672-7619(2016)06-0075-06
10.3404/j.issn.1672-7619.2016.06.015
2015-09-15;
2015-10-13
基金支助:海军工程大学自然科学基金资助项目(HJGSK2014G122)
周文进(1990-),男,硕士研究生,从事分层海水内波现象研究。
