风洞虚拟飞行模型机与原型机动力学特性分析
2016-11-14郭林亮祝明红孔鹏聂博文钟诚文
郭林亮, 祝明红, 孔鹏, 聂博文, 钟诚文
1. 西北工业大学 航空学院, 西安 710072 2. 中国空气动力研究与发展中心, 绵阳 621000
风洞虚拟飞行模型机与原型机动力学特性分析
郭林亮1, 祝明红2, *, 孔鹏2, 聂博文2, 钟诚文1
1. 西北工业大学 航空学院, 西安710072 2. 中国空气动力研究与发展中心, 绵阳621000
在低速风洞虚拟飞行试验系统中,采用三自由度(3-DOF)球铰支撑动力学相似缩比飞机模型,在气动力矩作用下试验模型可绕质心自由转动。这种带约束的运动与具有六自由度(6-DOF)的真实大气飞行存在差别,鉴于此,对各影响因素逐个剖离并进行了数值模拟和对比分析。结果表明:位移约束使两者间的动力学特性产生较明显的差异,缩比的影响符合相似准则规律,机构摩擦、模型重心与支撑点不重合影响较小,常值干扰力矩对模型的初始响应有一定影响。对比分析结果可以用于指导风洞虚拟飞行试验的开展,并有助于完善风洞虚拟飞行试验技术及其拓展应用。
风洞虚拟飞行试验; 动力学特性; 飞行力学; 仿真; 动态试验; 三自由度球铰
风洞虚拟飞行试验(Wind Tunnel Based Virtual Flight Testing, WTBVFT)在20世纪90年代由Ratliff和Marquart提出[1-2]。VFT概念是采用一种特殊装置将飞行器模型(包括惯性传感器、飞行控制计算机和控制执行器)支撑在风洞里;该装置允许试验模型自由转动,能够反应模型和控制装置之间产生的定常和非定常气动作用力的响应。这种条件下,自动驾驶仪和控制系统的性能在瞬态流动的影响下能够得到更好的理解,并可从中判别出整个闭环系统中的运行问题。
美国的Magill和Wehe在42 in(1 in=25.4 mm)小风洞中完成了虚拟飞行的演示试验,模型由6根张线支撑,张线与固定于模型外部的圈套联接[3]。该支撑系统允许模型在俯仰和滚转方向自由运动,以及航向上的有限运动。阿诺德工程中心采用8线支撑系统开展了某导弹高速风洞虚拟飞行试验,试验得到的俯仰、偏航和滚转速度与实际飞行试验中所获得的结果是相似的[4-5]。风洞虚拟飞行试验技术使得控制系统设计和气动特性研究并行开展成为可能,在项目初期发现控制系统存在的问题,可大大降低飞行试验的风险,缩短研发周期[1-2],也可成为早期对飞行硬件系统进行故障诊断的有力手段。
英国Lowenberg和Kyle在布里斯托尔大学的1.1 m开口风洞开发了摆式支撑装置[6](Pendulum Support Rig, PSR),针对BAe Hawk模型进行了单自由度及二自由度俯仰运动研究,发现了非线性的极限环振荡现象,并对该动态现象进行了建模与验证[7-8]。随后,研究人员采用动态增益策略对BAe Hawk模型进行俯仰反馈控制,改善了其整个试验迎角区间的动态响应特性[9]。英国的Gatto和Lowenberg在9 ft×7 ft(1 ft=0.304 8 m)闭口风洞分别采用三自由度机构和摆式支撑针对M2370动力相似模型开展试验[10-11],模型内置三自由度或单自由度转动铰,外连支杆和动态天平,通过天平测力获取模型静态气动力,通过参数辨识的方法获得操纵导数和动导数数据。
随后,英国的Pattinson等在布里斯托尔大学7 ft×5 ft闭口风洞五自由度机动装置(5-DOF Manoeuvre Rig),开展了多体动力学建模与仿真[12-13],进行了单自由度及多自由度组合动作的试验模拟,并对非线性迎角区间的横航向偏离特性进行了研究[14]。近几年,印度的Sen[15]、Peyadal[16]等也提出了一种类似的五自由度动态装置,与前者的区别是,其2个自由度的线运动是通过在支杆上的滑动来实现[15]。
俄罗斯T-203风洞的“Shtopor-203”试验装置[17],可实现模型俯仰、偏航及滚转3个转动自由度的运动。俯仰、偏航运动通过安装在模型内部的双轴节实现,而滚转运动由与模型连接的小支杆带动模型一起滚动来实现。该装置特点是能够在大迎角下绕速度矢量旋转,可以在水平风洞中开展尾旋及改出特性的研究工作。俄罗斯中央空气流体动力研究院(Central Aerohydrodynamic Institute, TsAGI)近期发展了背撑三自由度的动态机构[18],开展大迎角下机翼摇滚现象及控制问题研究。
法国的Strub等在低速开口风洞的三自由度机构上对某导弹的纵向俯仰跟踪控制问题进行了研究[19];瑞士的Stenfelt和Ringertz在单自由度机构上对飞翼布局飞机航向控制增稳特性进行了研究[20]。国内,中国空气动力研究与发展中心、航天空气动力技术研究院及南京航空航天大学对风洞虚拟飞行相关技术开展了类似研究[21-25]。
由此看出,风洞虚拟飞行试验技术是一项新兴的技术,有着广泛的应用前景,近年来美国、英国等仍在不断地提升和完善该项技术。需要指出,与真实大气飞行相比,由于自由度约束、模型缩比以及轴承摩擦等的影响使得试验模型机的动力学响应特性与原型机存在一定的差异;以往的研究中主要集中在非线性气动现象与控制方法等方面,而对这些差异缺乏系统全面的研究分析,因此有必要针对这些影响因素进行深入分析,以便更好地理解模型机与原型机的响应特性,也有利于更好地指导风洞虚拟飞行试验的开展和试验技术的研究。本文针对某飞机进行了数值仿真研究,对模型机与原型机的动力学特性存在的差异及其机理进行了对比分析。
1 虚拟飞行试验系统及流程
1.1试验系统
虚拟飞行试验系统主要包括支撑装置、动力学相似模型以及机载设备等,如图1所示。机构将飞机模型支撑于风洞试验段中心,支点位于模型质心;模型通过滚动接触型旋转球铰与支杆连接,具备绕质心的3个角运动自由度。采用的球铰克服了滑动球铰摩擦阻力大和内部间隙大等问题,其中俯仰和滚转自由度运动范围为±45°,偏航自由度运动范围为±180°。采用动力学相似模型,通过改变主支撑板上的前、中、后及左右机翼上的配重,调整所需的模型质量、质心和转动惯量等参数,质心纵向位置调整范围为32 mm。模型内部安装惯性测量单元(Inertial Measurement Unit,IMU)、嵌入式飞行控制计算机和舵面执行机构。
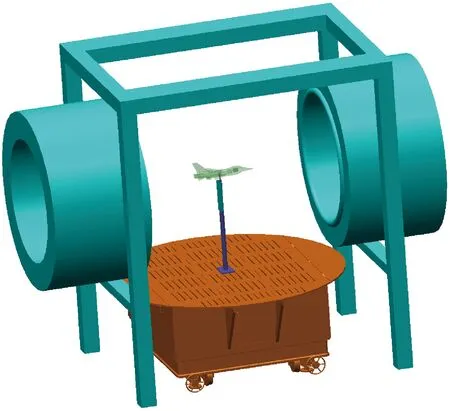
图1 三自由度(3-DOF)支撑装置示意图Fig.1 Schematic diagram of 3-degree-of-freedom(3-DOF) support system
1.2虚拟飞行试验流程
试验按照以下步骤进行:①调整模型质量、惯量及质心位置至模拟状态;②在风洞试验平台上安装支撑装置及模型,根据模型的初始俯仰角设置各舵面初始偏角;③风洞动力系统运行,将风速调节至试验风速(约20~30 m/s);④待风速稳定后,对模型实施有线或无线操纵,并记录风洞系统运行参数和模型姿态参数;⑤模型运动动作结束,风洞停止运行;⑥模型恢复至初始俯仰角,设置试验开关,舵面渐变至初始偏角。需要注意的是,在试验开始阶段,先设置舵偏角然后启动风洞;在结束阶段,先停止风洞然后设置舵偏角。
2 模型机与原型机差异及影响
2.1三自由度动力学方程
虚拟飞行试验中,由于限制了线运动,因此模型所受的合外力为零,即模型重力、所受的气动力及支撑装置的作用力的合力为零。三自由度运动模拟中,模拟飞机运动速度可采用两种方法。一种方法是,风洞来流速度保持不变,根据相对运动的原理,可认为飞机模型保持定速飞行,其动力学方程见式(1)。另一种方法是假定飞机速度为零,采用自然风模拟风洞来流,其动力学方程见式(2)。两种方法的仿真结果如图2所示。对于俯仰、偏航和滚转3个方向的角运动,两种模拟方法几乎没有差别。对于线运动,第一种方法中线位移和线位移加速度为零,但哥氏加速度不为零;第二种不存在线位移,也就不存在加速度。
(1)
(2)
式中:m为模型质量;u、v和w为体轴系下3个速度分量;p、q和r分别为体轴系下滚转、俯仰和偏航角速度;Ix、Iy、Iz和Ixz为模型的主轴转动惯量和交叉惯量;L、M和N为体轴系下模型所受的合外力矩。
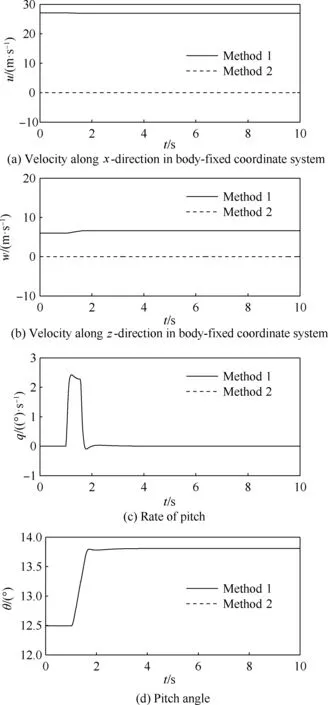
图2 三自由度运动不同模拟方法结果Fig.2 Simulation results for 3-DOF equations withdifferent methods
2.2线位移约束的影响
真实飞行器都有6个自由度:质心的3个线运动和绕质心的3个角运动。线运动中,飞行速度的变化会导致马赫数和雷诺数的改变,从而带来气动力特性的变化,当然飞行速度变化本身也会影响气动力;飞行速度的空间方向由爬升角和航迹方位角决定,爬升角变化会带来飞行高度的变化,航迹方位角变化会带来飞行侧向位置的变化。
而在虚拟飞行试验中,风速的大小和方向保持不变,模型的线位移被约束,因此航迹爬升角始终为0°。从垂直平面运动分析,俯仰角θ是由迎角α和爬升角γ组成,因此在风洞中的模型做纵向机动动作时,迎角和俯仰角基本相等。
六自由度和三自由度两种情况下纵向操纵的响应结果如图3所示。六自由度飞行的结果是基于传统的刚性飞机动力学和运动学方程组求解获得,三自由度飞行的结果是基于式(1)求解获得。六自由度中,飞机首先抬头,尔后逐渐爬升,同时速度减小;三自由度中,飞机速度和航迹角保持不变。相比六自由度,三自由度稳态响应迎角增大,稳态响应俯仰角减小。这种差异主要是没有与线运动耦合引起的。自由飞行中,飞机爬升时速度矢量向上偏转;这将导致航迹明显改变的同时,迎角增量会减小;迎角和航迹角的综合影响导致俯仰角增量变大。
横向操纵响应的结果如图4所示。六自由度自由飞行中,由于重力的作用飞机右滚后出现小的正侧滑,并伴随横向漂移,最终滚转角和偏航速率保持常值,形成稳定的协调转弯。三自由度中,基本未出现侧滑,而侧滑本身起到横向稳定作用,因此动态响应过程中滚转速率增大,稳态滚转角也相应增大。航向操纵响应规律与横向类似,如图5所示,与六自由度相比,动态响应过渡过程中出现负的侧滑增量和正的滚转速率增量,因此稳态滚转角略大。实际飞行中经常伴随着纵横向的耦合运动,图6给出了斜拉杆操纵下的响应结果。为了便于比较,其操纵规律与单独的纵向、横向操纵保持一致。可以看出,在耦合操纵的情况下,三自由度与六自由度的差异与单独的纵向、横向运动基本一致。
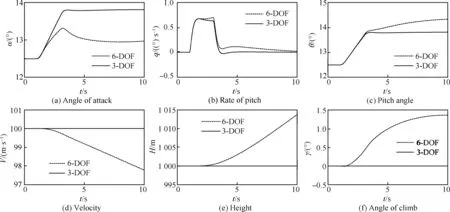
图3 俯仰操纵响应结果Fig.3 Simulation results of pitch response
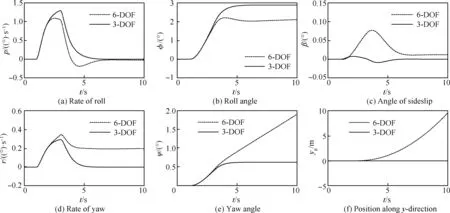
图4 横向操纵响应结果Fig.4 Simulation results of lateral response
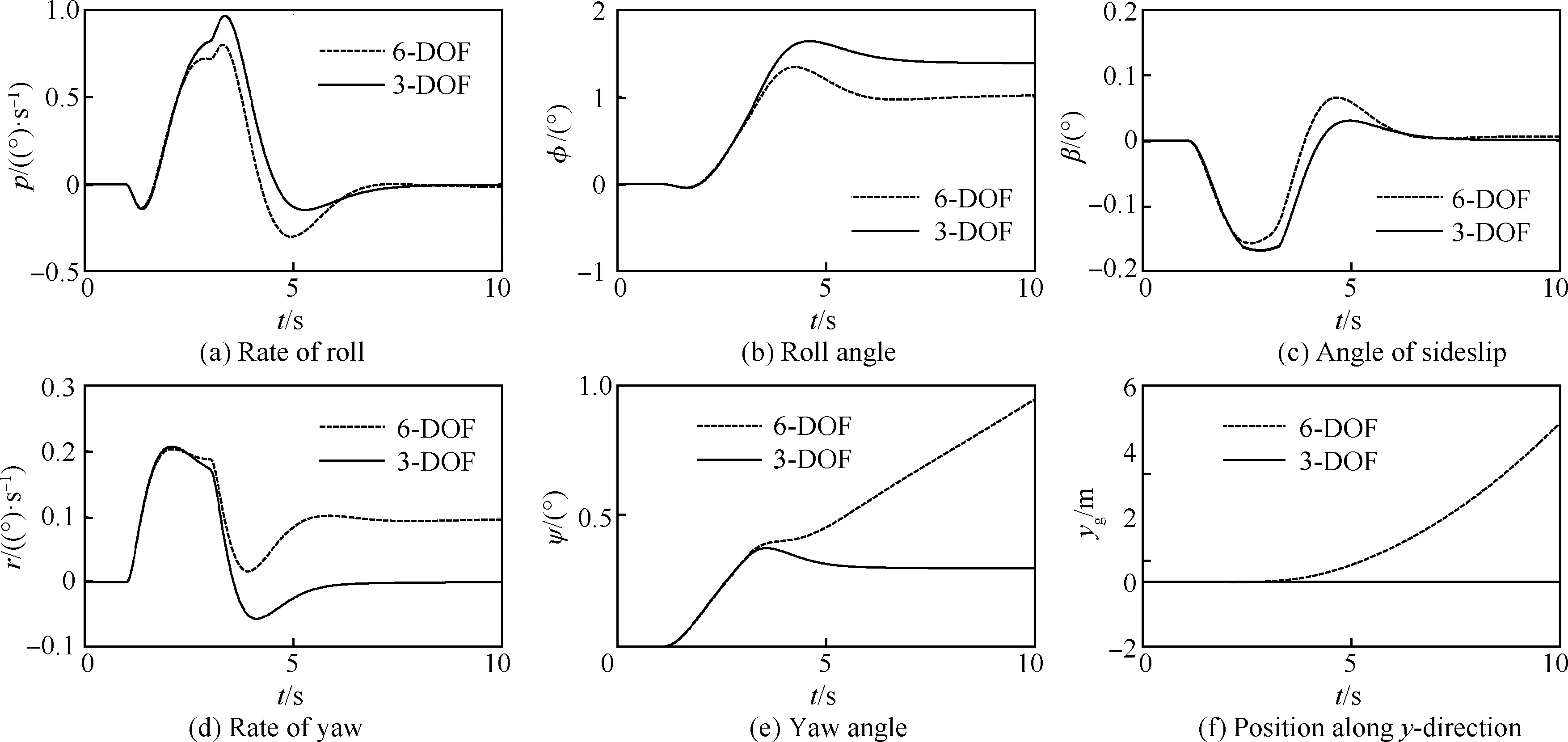
图5 航向操纵响应结果Fig.5 Simulation results of directional response
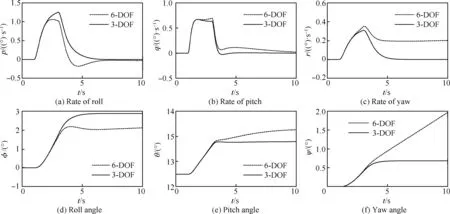
图6 纵横向耦合操纵响应结果Fig.6 Simulation results of longitudinal and lateral coupling response
综上可知,线位移约束带来的差异较为明显;若通过虚拟飞行试验获得飞机六自由度的运动信息,需要采取补偿或修正的技术手段[26]。比如,在试验系统中增加高频天平测量试验模型的气动力,并输入到实时数字仿真环节求解线运动方程,然后将轨迹运动的相关信息通过反馈形式补偿到虚拟飞行的控制律中。这样角运动信息由虚拟飞行试验模型的实际响应得到,线运动信息由实时数字仿真环节得到。
2.3缩尺比的影响
受风洞尺寸的限制,飞机需要经过动力学相似缩比后才能进行虚拟飞行试验;缩比后模型机的模拟要求几何相似、动力学相似,还要求控制系统相似。一般来说,采用试验系统模拟实际物理系统时,可以采用量纲分析方法,建立两者之间物理量的对应关系,具体推导过程参见文献[27]。假定模型机与原型机的缩比为n,那么模型机与原型机的相似比例关系如表1~表3所列。
可以看到,弗劳德数与马赫数Ma不能同时模拟。动力学相似要求飞机与模型的弗劳德数必须相等;那么在相同高度下,马赫数就变为全尺寸飞机的n0.5倍。在低速飞行区间,对于高性能大后掠角战斗机,马赫数对气动特性影响较小,因此这种模拟是可行的。
表1动力相似模型比例系数
Table 1Proportional relationships of dynamically similar model
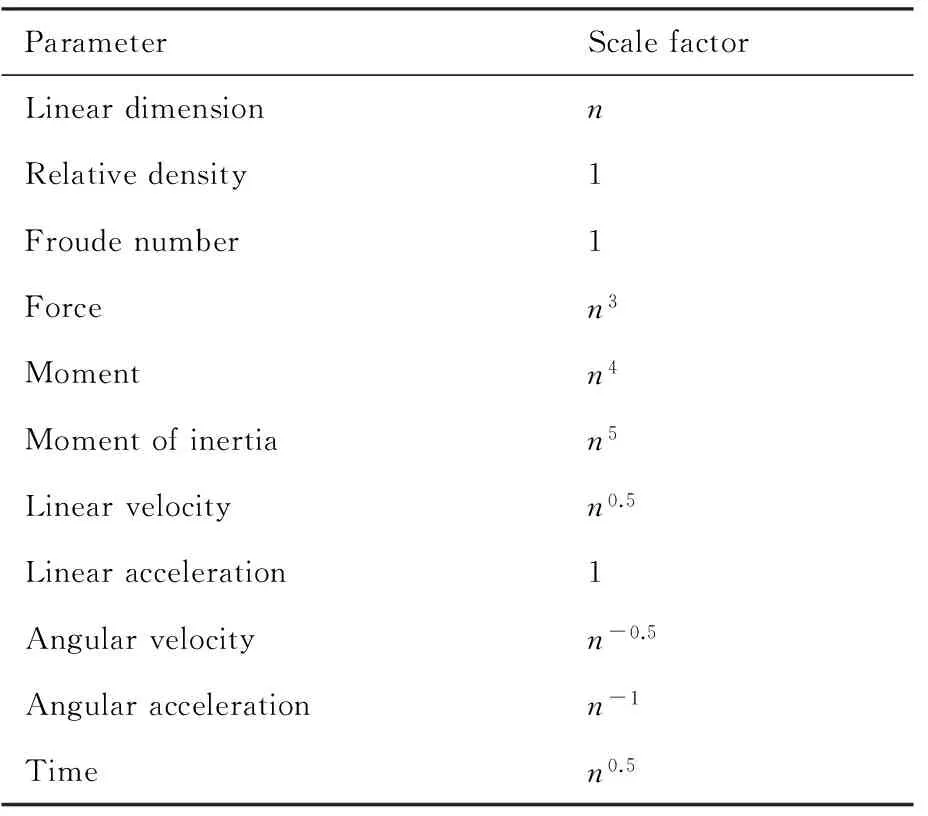
ParameterScalefactorLineardimensionnRelativedensity1Froudenumber1Forcen3Momentn4Momentofinertian5Linearvelocityn0.5Linearacceleration1Angularvelocityn-0.5Angularaccelerationn-1Timen0.5
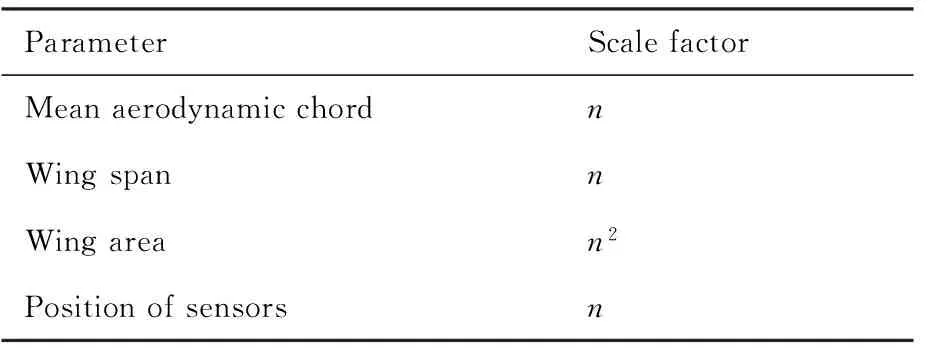
表2 几何相似参数
表3大气飞行相似参数
Table 3Proportional relationships of atmosphere flight parameter
ParameterScalefactorHeight1Airdensity1Man0.5
对于控制系统而言,除了要保证控制系统在组成和结构上与原型机的相似性外,对其通道上的每个部件还要进行相似变换,具体比例关系如表4 所示。主要包括:
1) 动态环节的特征参数。比如舵机和传感器的带宽,舵机的偏转速率,滤波器、清洗网络和校正环节的带宽或时间常数等;频带要变宽,时间常数要变小。
2) 采样周期和采样频率。模型机的采样周期要减小,采样频率要增大。
3) 反馈增益。角速率和角加速度增益要减小,迎角、侧滑角增益保持不变。
假定模型机与原型机的缩比n为1/13,二者的纵向操纵响应结果如图7所示。
由时间历程曲线比较可见,模型机与原型机的时间相似比例约为1/3.6,而俯仰角速度之比约为3.6/1,稳态响应迎角和俯仰角基本相等,这与理论的比例关系基本吻合。因此缩比的影响可以通过时间轴的压缩和幅值的缩放将两者统一起来,也就是说可以通过相似变换关系由模型机导出原型机的特性,从而间接验证原型机的控制律和响应特性。
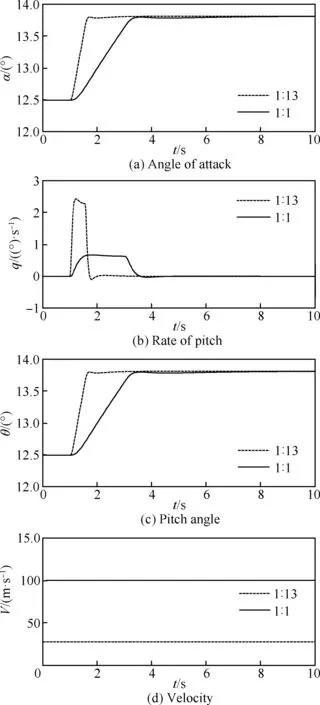
图7 模型机与原型机纵向操纵响应比较Fig.7 Pitch response comparison between scaled-model and full-scale aircraft
表4飞行控制系统相似参数
Table 4Proportional relationships of flight control system parameters
ParameterScalefactorBandwidthandrateofactuatorn-0.5Bandwidthofsensorsn-0.5Bandwidthoffiltern-0.5Frequencyofdynamicelementn-0.5Feedbackgainofangularraten0.5FeedbackgainofangularaccelerationnSteptimen0.5
2.4机构摩擦影响
相关研究表明球铰摩擦对系统阻尼的影响与支撑装置相关[3,10,12]。球铰在跟随模型转动中存在一定的摩擦,对飞机的动力学特性影响需要进行考察。通常的做法是:在试验前即风速V∞=0 m/s条件下采用质量弹簧阻尼系统对摩擦力矩进行辨识。用已知弹性系数的弹簧将模型拉紧,模型姿态受到初始扰动后作正弦振荡并最终稳定。用航姿参考系统记录下模型姿态角的时间历程,然后调整参数逼近记录曲线可获得摩擦阻尼及力矩大小。以上过程对俯仰、偏航和滚转3个自由度分别进行,并重复多次以减小误差。以纵向俯仰运动为例,简化的摩擦力矩模型为
(3)
式中:θ为模型俯仰角;Iy为模型的俯仰转动惯量;k为弹簧的弹性系数;l为弹簧与模型的连接点至转动中心的距离;μ为球铰的摩擦系数;F为球铰所受的法向力;d为球铰的直径;Mf为摩擦力矩。图8给出了V∞=27 m/s时有无摩擦的仿真结果。考虑摩擦力矩后(约0.05 N·m),稳态响应迎角略有降低,俯仰速率响应的超调略微减小,摩擦的影响相当于增加了俯仰阻尼。从时间历程曲线总的趋势看,在一定范围内,摩擦的影响可以忽略。
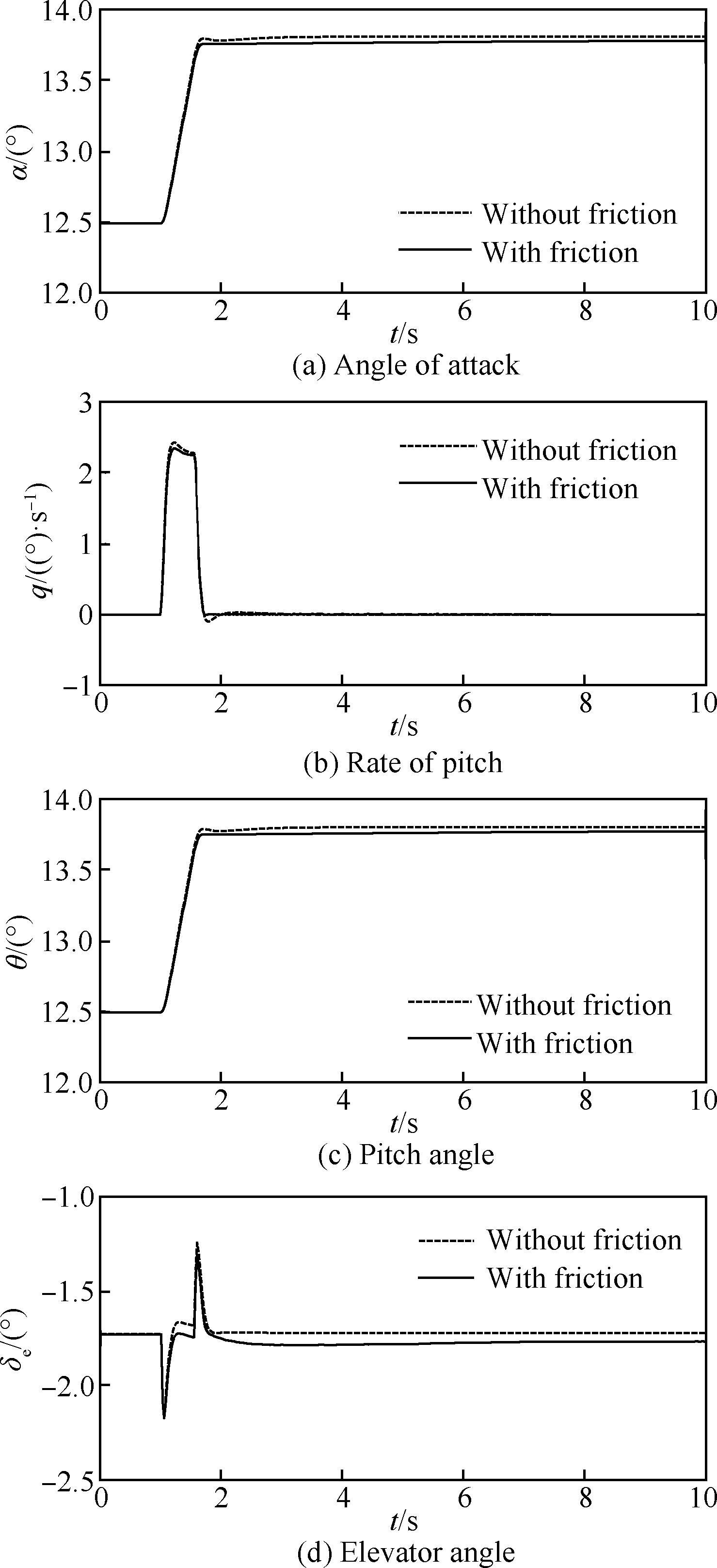
图8 摩擦对纵向操纵响应的影响Fig.8 Effect of friction torque on pitch response
2.5重心位置影响
虚拟飞行试验中,试验前需仔细调整模型的质心位置。通过调整配重满足质心纵向和横向位置的模拟要求。模型质心的竖向位置模拟需略低于转轴中心。这主要是为了防止模型在滚转方向过于敏感,要求风速V∞=0 m/s时模型具有一定的滚转稳定性,以使模型受到扰动后依靠自身重力能保持零滚转。因此实际操作中模型质心与转轴中心是不重合的。图9给出了质心在转轴中心下方5 mm的仿真结果。模型的迎角响应差异很小,但初始配平舵偏相差0.12°。由图9可见,将模型质心的偏心距离控制在适当的范围内,其对动态响应过程影响较小。
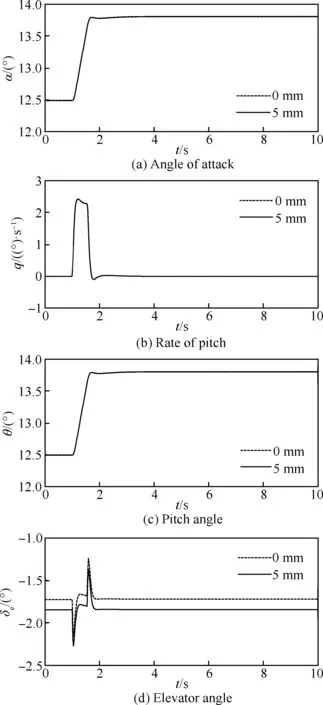
图9 偏心对纵向操纵响应的影响Fig.9 Effect of deviation of center of gravity on pitch response
2.6常值力矩干扰
当飞机模型气动力试验时所采用的模型支撑方式与虚拟飞行试验时的模型支撑方式不同时,将使得两者的力矩特性存在一定的差异,因而对模型的配平和响应产生影响。这种影响称之为常值力矩干扰。图10给出了俯仰力矩干扰的仿真结果(ΔCm=-0.01)。受到扰动后,模型在更小的迎角重新达到平衡,因此其主要影响模型的初始响应特性。如果有条件进行不同支撑方式的静态测力试验,就可以获得比较准确的支架干扰数据,并在气动力建模中予以考虑以减小其影响。
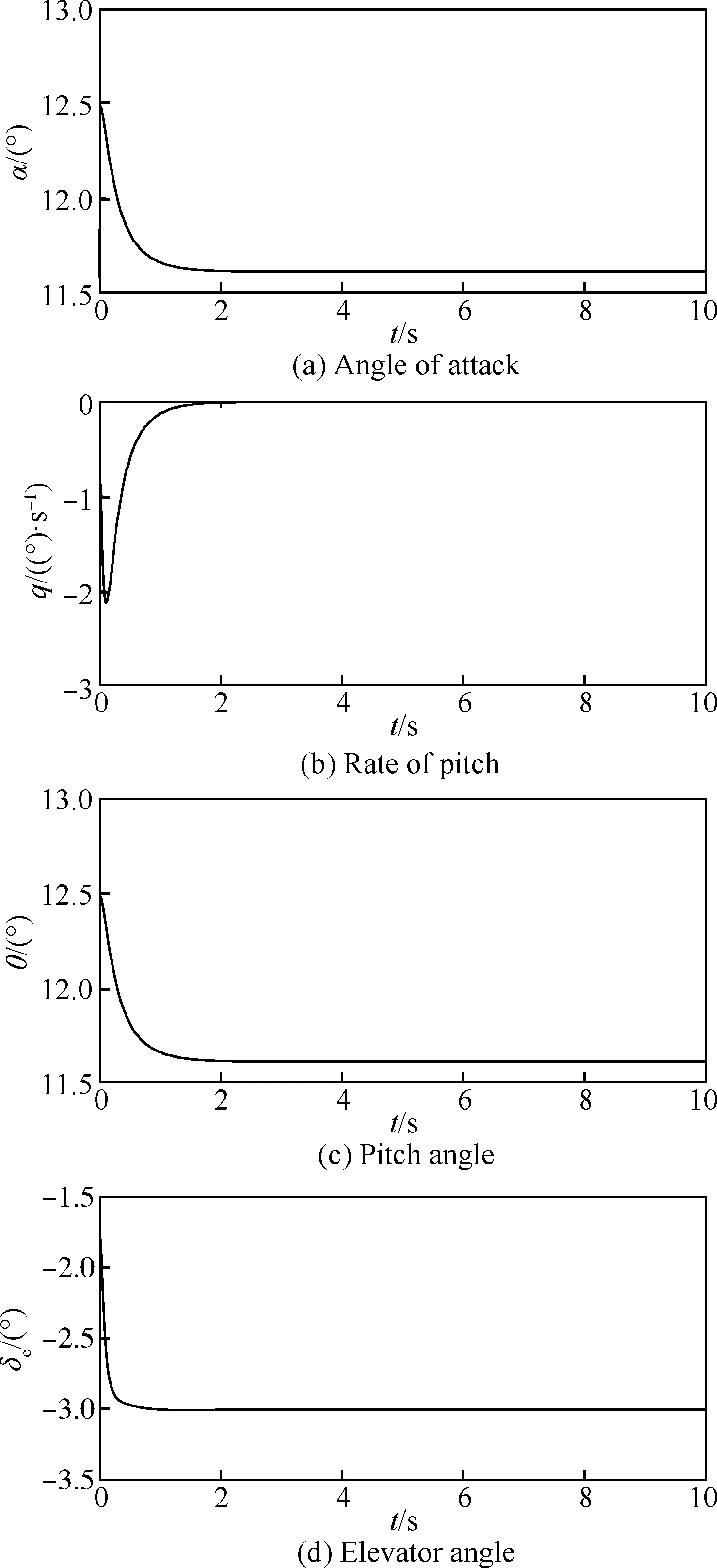
图10 常值力矩干扰响应Fig.10 Response to constant moment disturbance
3 结 论
1) 该对比分析方法可用于研究虚拟飞行模型机与原型机的动力学行为,对完善风洞虚拟飞行试验技术和在风洞中开展气动/飞行/控制一体化研究具有指导意义。
2) 虚拟飞行试验时线位移约束带来的差异比较明显,需要通过合适的补偿方法更为真实地模拟飞机的运动。
3) 模型缩尺比的影响可按相似准则有效推算原型机的响应特性;在一定范围内,摩擦、重心位置等影响较小;通过精确的气动力建模可以减小常值力矩干扰的影响。
4) 在今后的研究中需要针对飞机类被控对象线位移约束的补偿技术开展研究,包括纵向补偿、横航向补偿以及补偿信号的选取等问题。
[1]RATLIFF C L, MARQUART E J. An assessment of a potential test technique: AIAA-1995-3415[R]. Reston: AIAA, 1995.
[2]RATLIFF C L, MARQUART E J. Bridging the gap between ground and flight tests: Virtual flight testing (VFT): AIAA-1995-3875[R]. Reston: AIAA, 1995.
[3]MAGILL J C, WEHE S D. Initial test of a wire suspension mount for missile virtual flight testing: AIAA-2002-0169[R]. Reston: AIAA, 2002.
[4]LAWRENCE F C, MILLS B H. Status update of the AEDC virtual flight testing development program: AIAA-2002-0168[R]. Reston: AIAA, 2002.
[5]MAGILL J C, CATALDI P, MORENCY J R, et al. Demonstration of a wire suspension for wind-tunnel virtual flight testing[J]. Journal of Spacecraft and Rockets, 2009, 46(3): 624-633.
[6]LOWENBERG M H, KYLE H L. Development of a pendulum support rig dynamic wind tunnel apparatus: AIAA 2002-4879[R]. Reston: AIAA, 2002.
[7]DAVISON P M, LOWENBERG M H. Experimental analysis and modeling of limit cycles in a dynamic wind tunnel rig[J]. Journal of Aircraft, 2003, 40(4): 776-785.
[8]DAVISON P M, LOWENBERG M H. Modeling nonlinear behaviour in a single degree-of-freedom dynamic wind tunnel rig: AIAA-2003-5314[R]. Reston: AIAA, 2003.
[9]RICHARDSON T S, DUBS A, LOWENBERG M H, et al. Wind-tunnel testing of a dynamic state-feedback gain scheduled control system: AIAA-2005-5976[R]. Reston: AIAA, 2005.
[10]GATTO A, LOWENBERG M H. Evaluation of a three-degree-of-freedom test rig for stability derivative estimation[J]. Journal of Aircraft, 2006, 43(6): 1747-1762.
[11]GATTO A. Application of a pendulum support test rig for aircraft stability derivative estimation[J]. Journal of Aircraft, 2006, 46(3): 927-934.
[12]PATTINSON J, LOWENBERG M H, GOMAN M G. A multi-degree-of-freedom rig for the wind tunnel determination of dynamic data: AIAA-2009-5727[R]. Reston: AIAA, 2009.
[13]PATTINSON J, LOWENBERG M H, GOMAN M G. Multi-degree-of-freedom wind-tunnel maneuver rig for dynamic simulation and aerodynamic model identification[J]. Journal of Aircraft, 2013, 50(2): 551-566.
[14]ARAUJO-ESTRADA S A, LOWENBERG M H, NEILD S, et al. Evaluation of aircraft model upset behaviour using wind tunnel manoeuvre rig: AIAA-2015-0750[R]. Reston: AIAA, 2015.
[15]SEN A, BHANGE N P, WAHI P, et al. 5-degree-of-freedom dynamic rig for wind tunnel tests of aerospace vehicles: AIAA-2009-5605[R]. Reston: AIAA, 2009.
[16]PEYADAL N K, GHOSH A K, GO T H. Mathematical modelling, simulation, and estimation of aircraft parameters using five degree-of-freedom dynamic test rig[J].Angewandte Chemie Internation Edition, 2007, 46(17): 3126-3130.
[17]SOHI N P. Modeling of spin modes of supersonic aircraft in horizontal wind tunnel[C]//24th International Congress of the Aeronautical Sciences. Yokohama, Japan: ICAS, 2004.
[18]GRISHIN I, KHRABROV A, KOLINKO A, et al. Wind tunnel investigation of critical flight regimes using dynamically scaled actively controlled model in 3 DOF gimbal[C]// 29th Congress of the International Council of the Aeronautical Sciences. St. Petersburg, Russia: ICAS, 2014.
[19]STRUB G, THEODOULISY S, GASSMAN V, et al. Pitch axis control for a guided projectile in a wind tunnel-based hardware-in-the-loop setup: AIAA-2015-0153[R]. Reston: AIAA, 2015.
[20]STENFELT G, RINGERTZ U. Yaw control of a tailless aircraft configuration[J]. Journal of Aircraft, 2010, 47(5): 1807-1810.
[21]李浩.风洞虚拟飞行试验相似准则和模拟方法研究 [D]. 绵阳: 中国空气动力研究与发展中心, 2012.
LI H. Study on the similarity criteria and simulation method of the wind tunnel based virtual flight testing[D]. Mianyang: China Aerodynamics Research and Development Center, 2012 (in Chinese).
[22]席柯, 袁武, 阎超, 等. 基于闭环控制的带翼导弹虚拟飞行数值模拟[J]. 航空学报,2014, 35(3): 634-642.
XI K, YUAN W, YAN C, et al. Virtual flight numerical simulation of the basic finner projectile with closed loop[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 634-642 (in Chinese).
[23]赵忠良, 吴军强, 李浩, 等.2.4 m跨声速风洞虚拟飞行试验技术初步研究[J].航空学报,2016, 37(2): 504-512.
ZHAO Z L, WU J Q, LI H, et al. Investigation of virtual flight testing technique based on 2.4 m transonic wind tunnel[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(2): 504-512 (in Chinese).
[24]胡静, 李潜. 风洞虚拟飞行试验技术初步研究[J]. 实验流体力学,2010, 24(1): 95-99.
HU J, LI Q. Primary investigation of the virtual flight testing techniques in wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2010, 24(1): 95-99 (in Chinese).
[25]吕光男. 风洞虚拟飞行试验中的飞行力学与控制问题研究[D]. 南京: 南京航空航天大学, 2009.
LV G N. Research on a flight dynamics and control in wind tunnel based virtual flight test [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009 (in Chinese).
[26]GEBERTL G, KELLY J, LOPEZ J, et al. Wind tunnel based virtual flight testing: AIAA-2000-0829[R]. Reston: AIAA, 2000.
[27]陈孟钢, 高金源. 缩比模型飞机及其飞控系统与原型机的相似关系[J].飞行力学,2003, 21(2): 34-37.
CHEN M G, GAO J Y. Similarity relationships between scaled-model aircraft with its flight control system and prototype aircraft[J]. Flight Dynamics, 2003, 21(2): 34-37 (in Chinese).
郭林亮男,博士研究生,助理研究员。主要研究方向:实验空气动力学,飞行动力学与控制。
Tel: 0816-2464702
E-mail: guolinliangliang@163.com
祝明红男,研究员。主要研究方向:大迎角空气动力学和尾旋。
Tel: 0816-2461016
E-mail: 1400504410@qq.com
孔鹏男,助理研究员。主要研究方向:机械设计和机电一体化。
E-mail: kp00139@sohu.com
聂博文男, 助理研究员。主要研究方向:测控技术。
E-mail: xuanwen1981@163.com
钟诚文男,博士,教授,博士生导师。主要研究方向:计算流体力学。
Tel: 029-88460412
E-mail: zhongcw@nwpu.edu.cn
Analysis of dynamic characteristics between prototype aircraft and scaled-model of virtual flight test in wind tunnel
GUO Linliang1, ZHU Minghong2,*, KONG Peng2, NIE Bowen2, ZHONG Chengwen1
1. School of Aeronautics, Northwestern Polytechnical University, Xi’an710072, China 2. China Aerodynamics Research and Development Center, Mianyang621000, China
This paper presents a virtual flight testing system in low speed wind tunnel, which has a 3-degree-of-freedom (3-DOF) gimbal mechanism to connect a dynamically-scaled wind tunnel model supported by a vertical strut. The model can freely rotate around the center of gravity due to the aerodynamic moments. Obviously the constrained motion is different from the real 6-DOF free flight in the air. So the influencing factors which contribute to the dynamic characteristics’ differences between the prototype aircraft and scaled-model are individually compared and investigated through flight dynamics simulation. The results demonstrate that the constrained translational movement has a significant impact on the dynamic characteristics while the dynamic response of the scaled-model and full-scale aircraft meets the similarity law; both the 3-DOF bearing friction and the non-coincidence between center of gravity and center of gimbal has small influence; the constant moment disturbance has some impact on the initial response. The comparison and analysis can provide a guide for the virtual flight test in wind tunnel, and are also helpful for the improvement and application of the wind tunnel testing technique.
wind tunnel-based virtual flight testing; dynamic characteristics; flight dynamics; simulation; dynamic test; 3-degree-of-freedom gimbal
2015-09-24; Revised: 2015-10-20; Accepted: 2015-11-02; Published online: 2015-11-2414:40
National Basic Research Program of China (2015CB755800)
. Tel.: 0816-2461016E-mail: 1400504410@qq.com
2015-09-24; 退修日期: 2015-10-20; 录用日期: 2015-11-02;
时间: 2015-11-2414:40
www.cnki.net/kcms/detail/11.1929.V.20151124.1440.002.html
国家“973”计划 (2015CB755800)
.Tel.: 0816-2461016E-mail: 1400504410@qq.com
10.7527/S1000-6893.2015.0296
V212.1; V211.7
A
1000-6893(2016)08-2583-11
引用格式: 郭林亮,祝明红,孔鹏,等.风洞虚拟飞行模型机与原型机动力学特性分析[J]. 航空学报, 2016, 37(8): 2583-2593. GUO L L, ZHU M H, KONG P, et al. Analysis of dynamical characteristics between prototype aircraft and scaled-model of virtual flight test in wind tunnel[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(8): 2583-2593.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
URL: www.cnki.net/kcms/detail/11.1929.V.20151124.1440.002.html
