一种机械式管道清淤机器人的设计
2016-11-12沈体强
沈体强

摘 要:文章设计了一种机械式管道清淤机器人,主要通过电动缸控制清淤斗升降和翻转的方式完成清淤工作。介绍了清淤机器人的系统组成和工作原理,确定了主要技术参数。该机械式管道清淤机器人的研究,开辟了一条解决排水管道淤积堵塞问题的道路。
关键词:机械式;管道清淤机器人;设计;研究
中图分类号:TP242.3 文献标识码:A 文章编号:1006-8937(2016)29-0018-02
1 概 述
随着我国城市的建设和人民生活水平的提高,各省市的用水量不断增加,随之排水管道的排水量也不断增加。而人们所排放的生活垃圾、工厂所排放的工业垃圾以及建筑垃圾等经常导致排水管道淤泥沉积,如果不按时清理,必然导致管道堵塞,污水溢流。不仅会污染环境,还可能妨碍交通运输的正常运行,甚至给人们正常的生活带来困扰,损害市容市貌,给国家和人民造成巨大的经济损失。我国排水管道的分布非常广泛,管道内部环境更是复杂多变,所以城市排水管道的清理和维护工作非常棘手。
目前,大多数情况下只能通过人工作业的方式进行清理,且清理效果不是很有效。然而管道里往往含有一些有毒气体,给工人的工作带来了非常大的困难,而且容易对工人的身体健康造成伤害。于是,我们设计了一种机械式管道清淤机器人,能够安全高效的清理管道淤泥,为城市管道清理工作提供了一种新的解决方法[1]-[3]。
2 清淤机器人的系统组成及工作原理
2.1 清淤机器人的系统组成
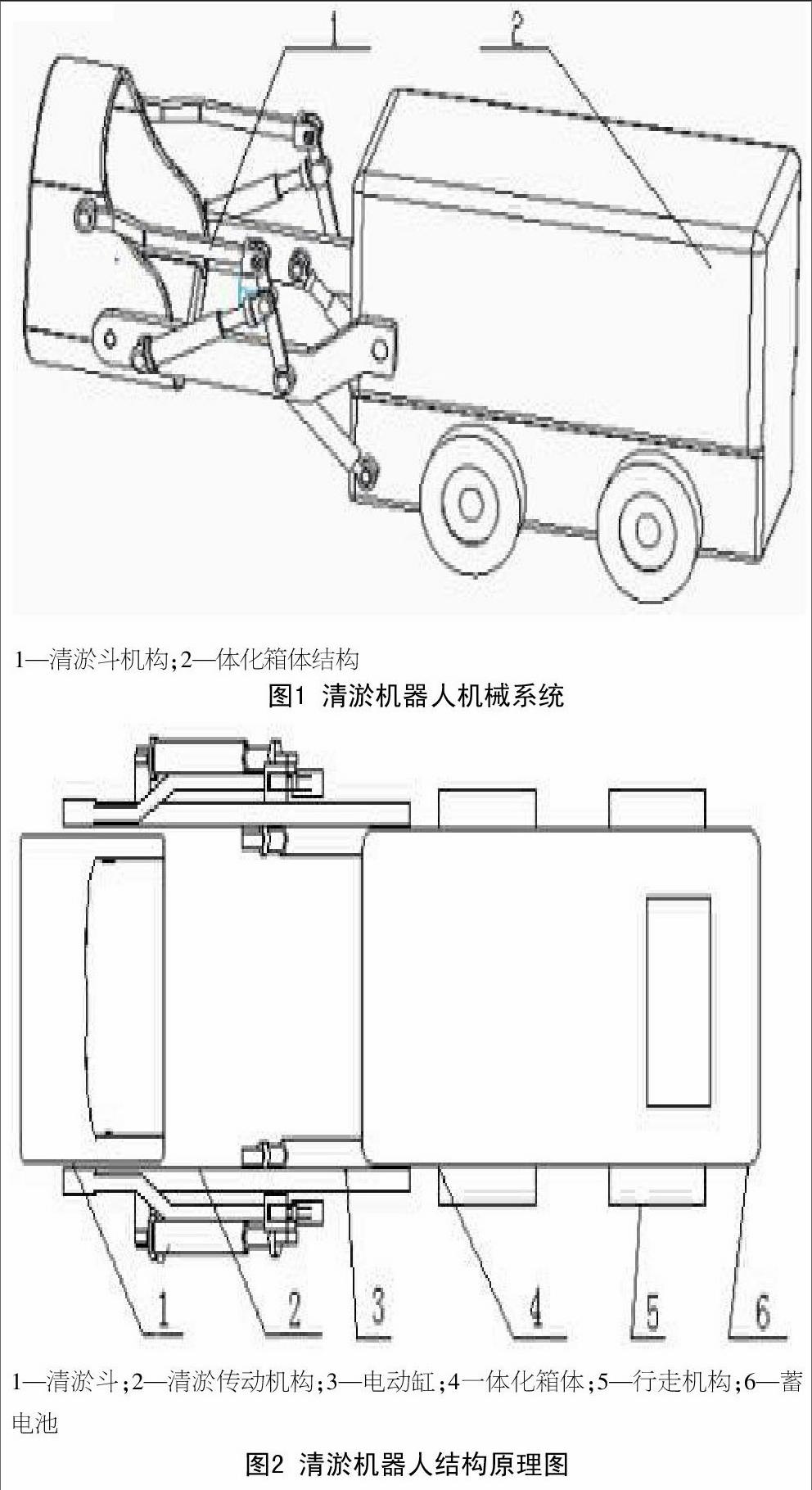
机械式管道清淤机器人主要由机械系统和控制系统两部分组成。如图1所示,机器人的机械系统主要包括清淤斗清淤机构部分和一体化箱体结构。
机械式排水管道清淤机器人适用于管径300 mm以上的排水管道,在管道内的空间是有限的,因此,机器人的整体结构参数要尽可能的小并且要保证输出稳定的清淤力[4]。整机结构设计方面要着重考虑清淤机器人在管道中的密封问题,从机械设计的角度提高密封的可靠性,我们采用一体化箱式结构提高机器人的密封性[5]。清淤机器人的总体结构设计采用轮式行走机构,以蓄电池为动力源,以电动缸驱动力控制清淤斗的升降和翻转。机械式清淤机器人的结构原理,如图2所示。
2.2 清淤机器人的清淤机构
为了适应管道的复杂环境,并能够节能高效的完成管道的清淤作业,设计了一种灵活可靠的组合清淤结构[6]。该机构由清淤斗、电动缸、连杆机构组成。清淤机构的三维模型图,如图3所示。
清淤斗机构可以在管道中完成举升翻转的动作,其中清淤斗的举升和翻转主要由两组同步的电动缸来完成,采用电动缸可以很好地实现机构的同步运行,使机构的受力更加均衡,运行平稳,连杆机构的各关节连接处,都装有轴承,减小了机构的磨损[7]。
清淤斗机构的举升装置可有效保证机器人车体在管道中的畅通运行,提高了清淤机器人的清淤效率,翻转机构可快速高效的将淤泥倒出,由于管道中环境复杂,清淤机构各关节连接处均采用密封装置,提高了机构的使用寿命。
2.3 清淤机器人的工作原理
机械式清淤机器人适宜于管道中淤泥少于50%的情况,假设管道中的淤泥少于50%,清淤机器人的工作过程可分为四个部分。
①将清淤机器人从窨井井口投放到工作管道,调整清淤斗机构的举升装置,使清淤斗位于一个合适的位置,保证其在空载时不会影响机器人的正常行走。
②清淤机器人到达工作位置后,工作人员在地上通过监控设备观察管道,调整清淤机器人的举升翻转机构,使清淤斗的弧形底部,与管道底部相接触,启动清淤机器人的行走驱动系统,视具体情况控制机器人的移动路线,通过拖动清淤斗,将管道内的淤泥收入斗中[8]。
③当淤泥达到清淤斗的最大储存量时,调整清淤斗的举升翻转机构,使清淤斗处于一个合适位置,使其不影响机器人的移动,保证淤泥不会从斗中漏出。
④当清淤机器人移动至检查井井口位置时停止,清淤斗的翻转机构,将淤泥卸在窨井井口附近,然后使用其他装置把淤泥运出窨井。
3 清淤机器人主要技术参数的确定
自主式清淤机器人的主要技术参数如下:
①适用管径:300~2 000 mm;
②移动速度:2~10 m/min;
③清淤能力:10 kg/次;
④最大越障高度:100 mm;
机械式清淤机器人在管道内部清淤作业,排水管道内部空间有限,清淤机器人的总体尺寸受到限制。为了使清淤机器人能够顺利从窨井井口进入工作管道,机器人的总体尺寸不能太大[9]。为了避免清淤机器人的总体尺寸过大而使机器人不能正常进入工作管道而卡在窨井和排水管道的交叉地带的情况发生,分析了清淤机器人的结构参数对机器人的可通过性的影响。
当清淤机器人的总体尺寸小于窨井口尺寸时,清淤机器人能够顺利通过窨井而进入工作管道。反之,当清淤机器人的总体尺寸大于窨井口尺寸时,机器人肯定会卡住。于是经计算可知,清淤机器人的总体尺寸如下:长约为1 200 mm,宽约为
400 mm,高约为400 mm。
4 结 语
本文设计了一种机械式管道清淤机器人,采用电动缸调节清淤斗高低和翻转,这种清淤方式能够适用更加复杂的工作环境,并且具有操作简单,工作效率高等特点。同时,减少了纯净水的适用,降低了成本,为更好的完成管道清淤工作提供了新的解决方案。
参考文献:
[1] 汤霞,陈卫兵,李怀正.城市排水系统沉积物特性及清淤方式研究进展 [J].城市道桥与防洪,2013,3(3).
[2] 李俊.城市排水管道的清淤问题[J].黑龙江水利科技,2004,01:122-123.
[3] 嵇鹏程,沈惠平,基于AT89C5控制的排水管道清淤机器人的设计[J].机 械设计与制造,2010.12.
[4] 王丰.基于pro/e的中小型排水管道清淤机器人虚拟样机设计[J].机电 一体化,2007.1.
[5] 李怀正,柏蔚,邱平平.一种新型排水管道在线检测设备的设计[J].绿色 科技,2013,7.
[6] 孟庆春,齐勇,张淑军,等.智能机器人及其发展[J].中国海洋大学学报 (自然科学版),2004,05:831-838.
[7] YOUNG SIK KWON, BYUNG-JU YI. Design and Motion Planning of a Two-Module Collaborative Indoor Pipeline Inspection Robot[J]. IEEE Transactions on Robotics, 2012, 28.
[8] 翟俊,李华飞,关东,等.大管径排水管道清淤系统的设计与开发[J].机械 设计与制造,2012,12:254-256.
[9] 肖海文,朱林海,翟俊,等.一种新型大管径排水管道清淤装置[J].中国给 水排水,2013,20:140-144.
