一种改进的SVPWM算法在矢量控制中的研究应用
2016-11-12鲁金升董永考
鲁金升, 董永考
(山东科技大学 电气与自动化工程学院,山东青岛266590)
一种改进的SVPWM算法在矢量控制中的研究应用
鲁金升, 董永考
(山东科技大学 电气与自动化工程学院,山东青岛266590)
为了解决传统的SVPWM算法中存在大量三角函数运算、增加微处理器的运行内存等问题,通过对传统算法的分析,提出一种基于标么值的三电平SVPWM改进算法,简化了计算方法,提高了数字化实现效率,克服了传统计算方法存在的缺点。最后以TMS320F2812为控制器,搭建了三电平异步电动机的矢量控制平台系统进行实验,结果表明该系统启动快,超调小,电流、电压波形良好,验证了该改进方法的正确性和可行性,为改进三电平SVPWM算法的研究提供了重要参考依据。
三电平逆变器;空间矢量脉宽调制;标幺值;矢量控制;数字信号处理器
0 引言
二极管中点箝位式三电平逆变器最早由A.Nabae等人于1980年提出,为人们对中高压大功率逆变器的研制开辟了新的思路,即通过逆变器电路结构的改造,用增加逆变器电路中电平数的方法减小du/dt和EMI[1,2],具有开关损耗小、谐波含量低、输出电压接近正弦等优点,成为近年来电力电子技术研究的热点[3,4]。
对于三电平的PWM控制方法主要包括载波调制法、空间电压矢量调制法、消除制定谐波法[5]。空间矢量调制方法是将交流电动机和逆变器看做一个整体,用逆变器不同的开关模式产生的磁链去逼近基准磁链,由它们的比较结果来决定逆变器的开关方式,具有易于数字化实现、转矩脉动小、电压利用率高的特点。但传统的SVPWM算法含有大量的三角函数运算,计算量大,对控制器也提出了较高的要求[6,7]。
本文在介绍二极管箝位三电平逆变器主电路以及SVPWM算法的基础上,重点阐述了改进的三电平SVPWM算法的详细推导过程,并结合异步电动机的矢量控制算法,搭建了异步电动机的矢量控制系统,进行了基于改进三电平SVPWM算法的异步电动机矢量控制系统的实验,并给出了实验结果和理论分析。
1 三电平逆变器主电路介绍
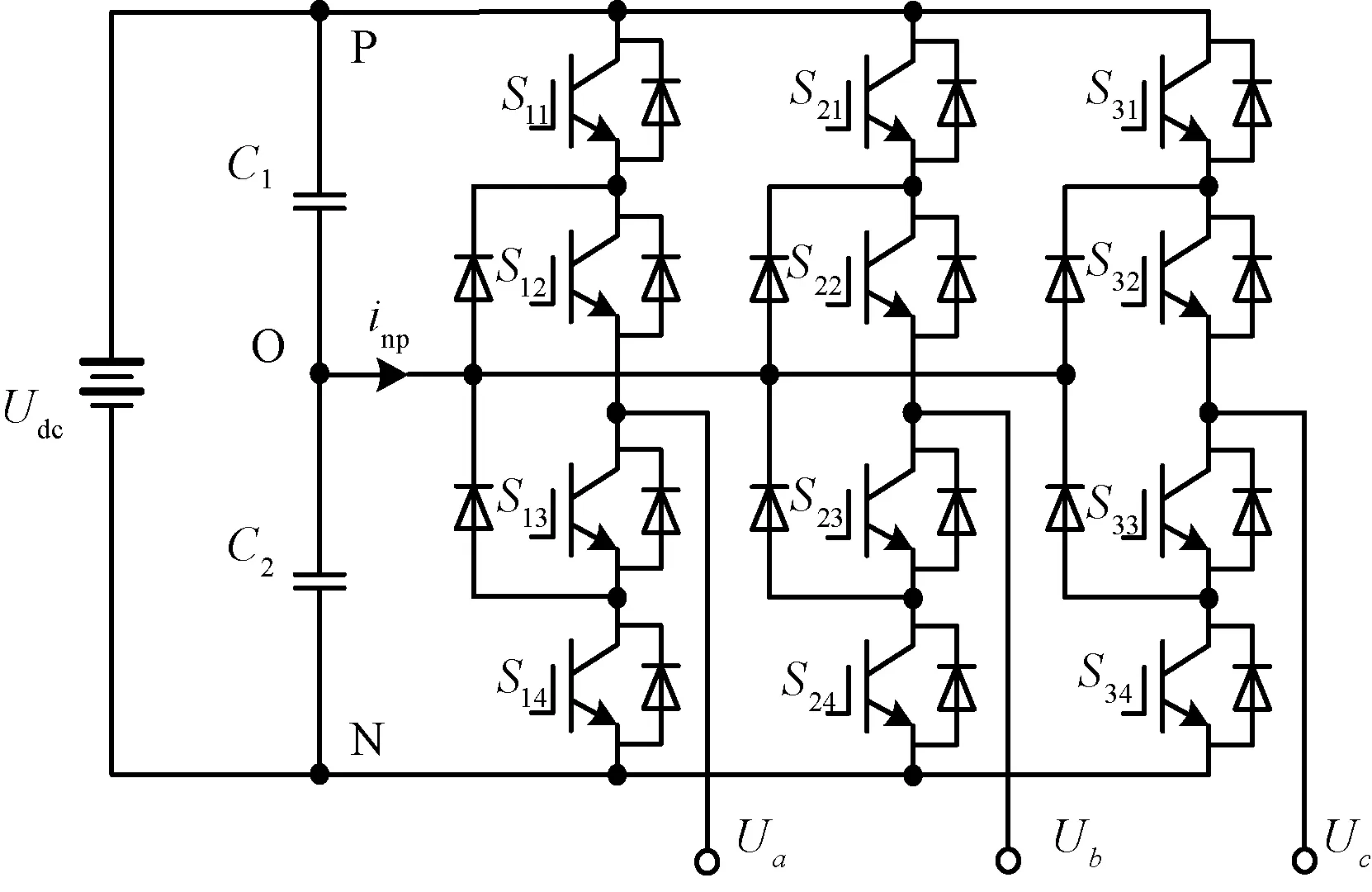
图1 三电平NPC逆变器主电路
二极管箝位三电平逆变器主电路结构如图1所示[1-3],共有三相桥臂,每相桥臂包括4个可控的功率管、4个续流二极管、两个箝位二极管,每相桥臂的4个功率管通过一定的逻辑驱动来改变每相桥臂的输出电压状态。在二极管箝位三电平逆变器主电路中每相桥臂上面两个开关管导通记为状态1,每相桥臂中间两个开关管导通记为状态0,每相桥臂下面两个开关管导通记为状态-1,以上三种状态分别对应每相桥臂输出电压值为UDC/2、0、-UDC/2。因此,三电平逆变器有33=27开关状态,定义空间矢量为:
(1)

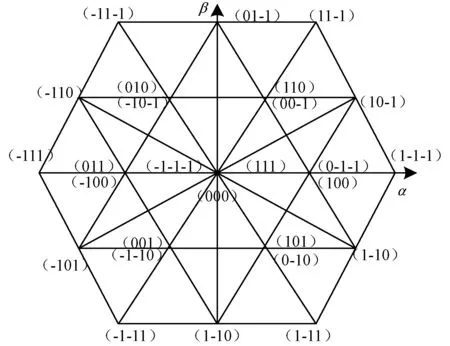
图2 三电平逆变器空间电压矢量图
2 三电平逆变器改进的SVPWM算法原理
设三相对称输入电压表达式为
(2)

(3)
三相标幺化的电压值Ua1、Ub1、Uc1通过Clack变换,由三相静止坐标系变换为两相静止的直角坐标系的电压值Uα1、Uβ1,表达式由式(4)给出,充分利用直角坐标系下的Uα1、Uβ1可以使计算大大简化。
(4)
2.1 大扇区判断
以α轴逆时针旋转,每60°为一个扇区,扇区号依次记为I、II…VI,根据参考矢量Uref落在扇区中的位置坐标(Uα1,Uβ1),来确定合成空间矢量所处的扇区N。结合矢量图的几何关系进行分析,合成空间矢量所在位置由Uα1和Uβ1以及二者的线性组合决定,此时定义如下关系式:
(5)
若U1>0,则A=1,否则A=0;若U2>0,则B=1,否则B=0;若U3>0,则C=1,否则C=0;通过表达式S=4C+2B+A得到的S值与实际扇区N有着一一对应关系,进而可确定空间矢量所在的各个扇区,对应关系如表1所示。

表1 S与实际扇区N的对应关系
2.2 小扇区判断
为了简化计算,先将第N(N取2,3,4,5,6)号大扇区的参考矢量顺时针旋转(N-1)×60°,将参考矢量旋转到I号大扇区的位置,在第I大扇区内进行所在小扇区的判断,将N号大扇区的参考矢量转化到第I扇区内坐标记为(Uα1,Uβ1),式(6)给出了各扇区转化到第I扇区的计算表达式:
(6)
其中,N为所在大扇区取值。
在第I大扇区内,划分为A、B、C、D4个小扇区,小扇区的分布情况如图3所示。
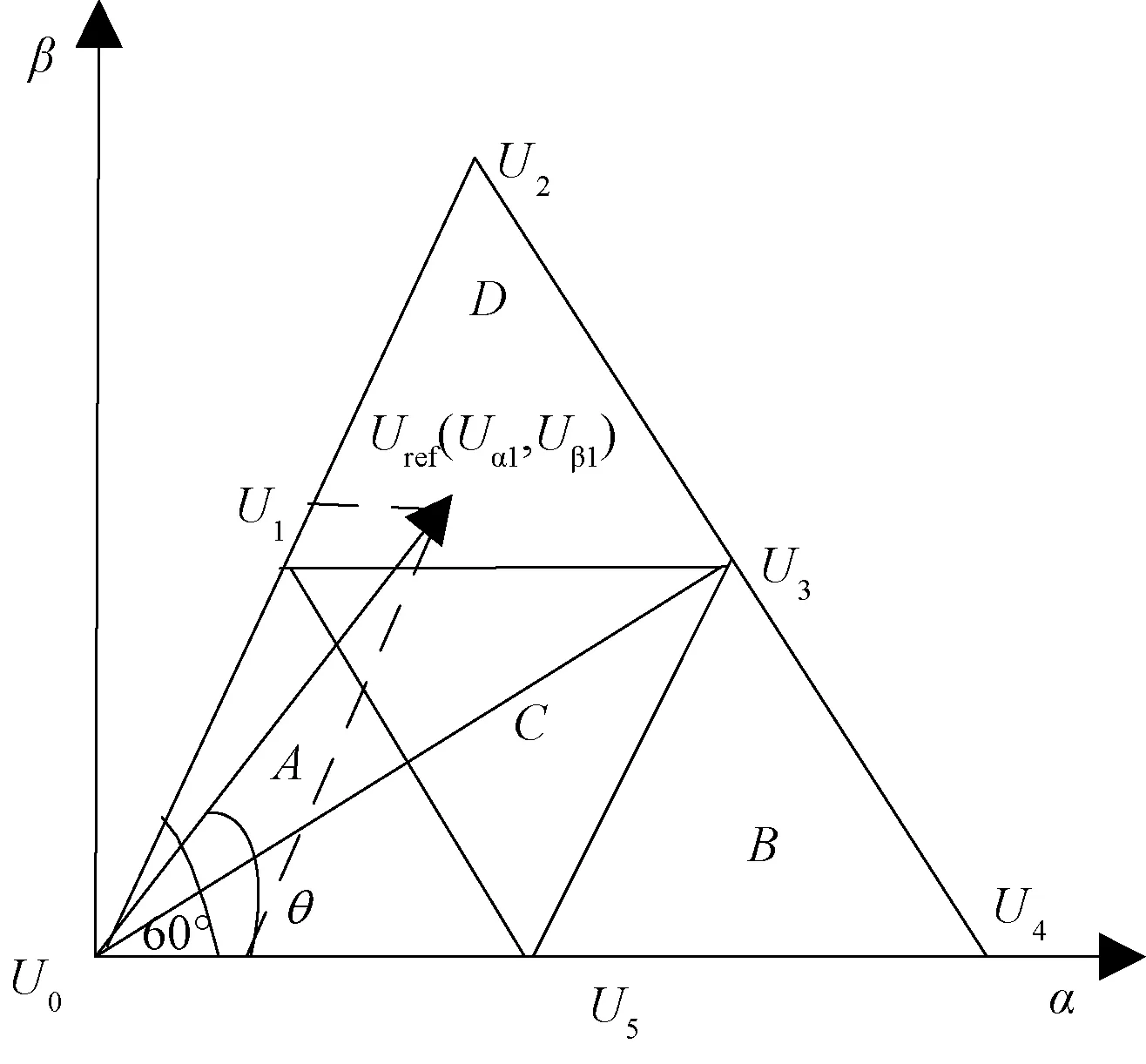
图3 小扇区的划分
根据各矢量的几何关系,可求出各个小扇区的边界线满足的方程,公式(7)给出了小扇区判断规则:
(7)

(8)
2.3 作用时间计算
确定了参考矢量所在大小扇区之后,在27个基本电压矢量中,选择与参考电压矢量Uref最近的3个基矢量,采用伏秒平衡原理计算3个矢量的作用时间,以图3中I号大扇区D小扇区为例,计算基本矢量的作用时间:
(9)
(10)
三个基本矢量的占空比为:
(11)
采用同样的计算方法,可以得到空间矢量在其他小扇区的占空比,通过计算可以发现,不同扇区的基本矢量空比都可由三个量X、Y、Z表示,X、Y、Z表达式记为:
(12)
根据X、Y、Z可以求出各小扇区内的作用时间,如表2所示。

表2 矢量作用时间
3 异步电动机转子矢量控制介绍
由电机学可知,异步电动机的动态数学模型是一个非线性、多变量、强耦合的系统[8,9]。按转子磁链定向的矢量控制方法的基本思想是:通过坐标变换、磁链定向的方法,将异步电动机等效成直流电动机,分别控制励磁分量和转矩分量,实现对异步电动机的解耦,最后将转子磁链定向坐标系中的电压控制信号经过反派克变换得到两相静止坐标系的电压控制信号,进而对逆变器进行控制。图4给出了按转子磁链定向的异步电动机矢量控制结构图[10,11]。
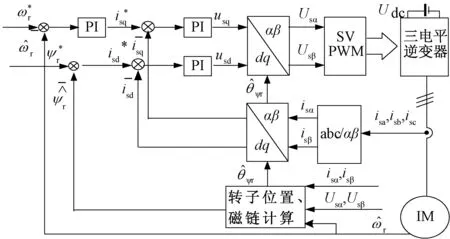
图4 异步电动机矢量控制结构图
4 实验系统设计
4.1 硬件设计
三电平逆变器矢量控制系统的硬件设计主要包括主电路模块、驱动电路模块、控制电路模块以及操作面板模块组成。主电路模块部分包括三相不控整流模块、三电平逆变器主电路、三相异步电动机、电容组件。驱动电路部分选用具有过流和欠电压保护功能的光耦HCPL316J芯片,由DC/DC变换电路为HCPL316J芯片供电,保证驱动电路的正常工作。控制电路部分以TMS320F2812芯片为控制器,完成实时读取操作面板的信号指令;电流、电压信号的采样;坐标变换;转速环、磁链环、电流环调节器的调节;SVPWM;电压、电流故障信号检测等功能。控制面板模块主要通过TMS320F2812芯片的SPI通讯模块进行人机交互。图5给出了异步电动机三电平逆变器矢量控制硬件结构图。

图5 硬件结构图
4.2 软件设计
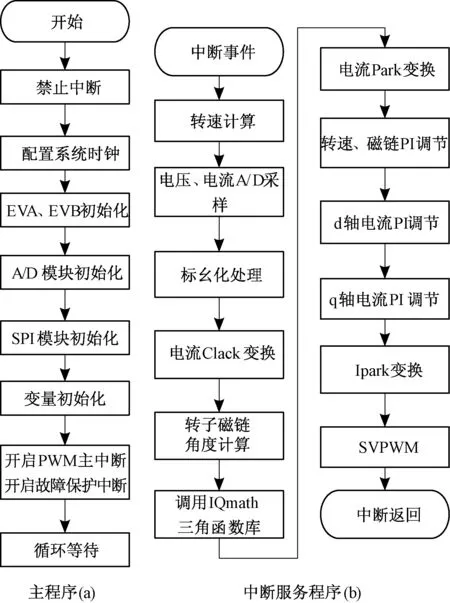
图6 程序流程图
矢量控制系统包括主程序和中断服务程序两部分,主程序主要进行系统初始化、变量初始化以及相关寄存器的配置。中断服务函数主要进行异步电机矢量控制算法的实现。图6为矢量控制程序流程图,图7为SVPWM算法实现流程图。
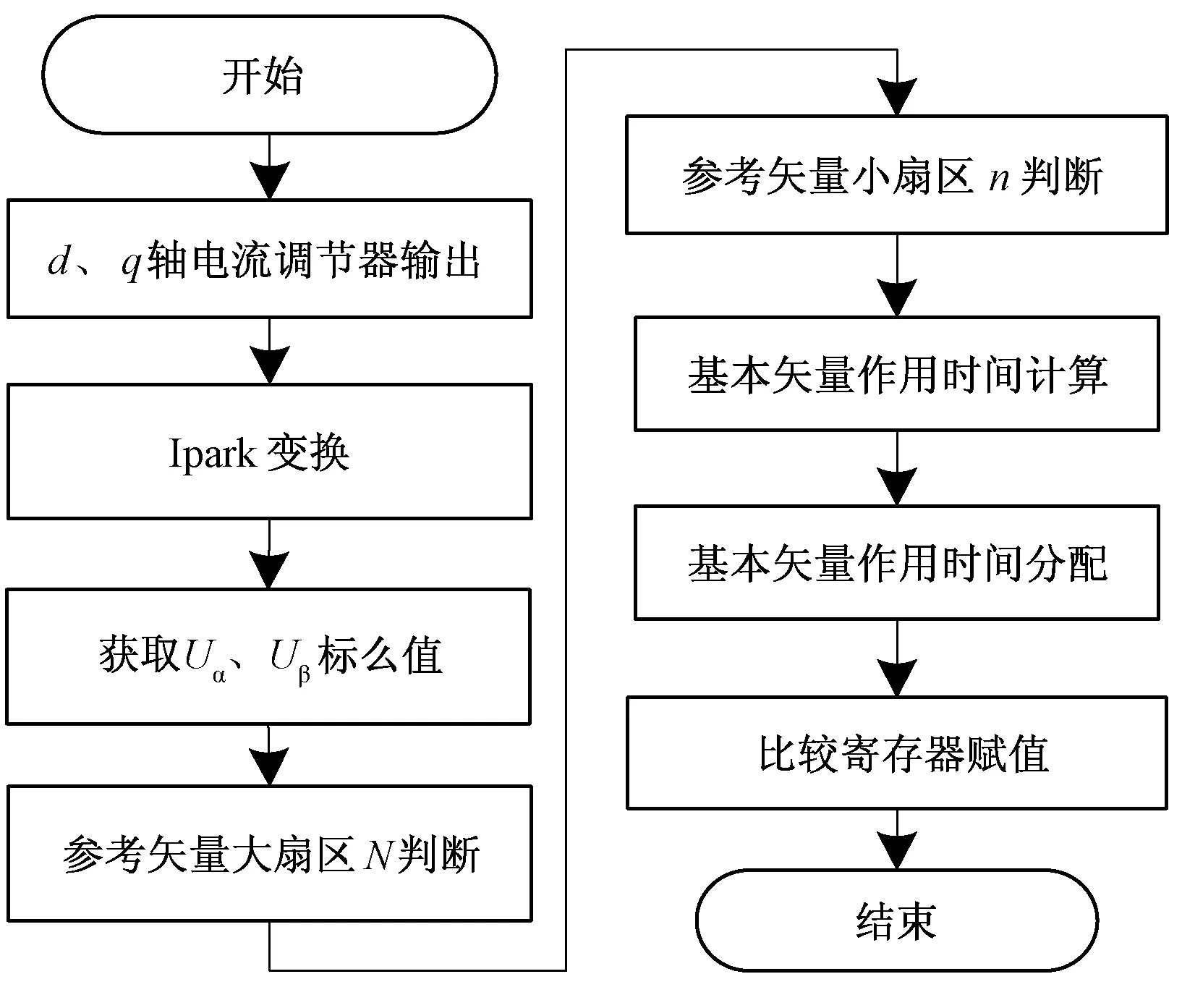
图7 SVPWM流程图
5 实验验证
利用一台3.7 kW的三相异步电动机进行基于SVPWM改进算法的异步电动机矢量控制实验,电机额定值为Pe=3.7 kW,Ue=380 V,Ie=8 A,fe=50 Hz,ne=1 470 r/min;电机的参数为Rs=1.268 Ω,Rr=0.883 Ω,Lm=0.147 H,Ls=0.155 H,Lr=0.155 H,极对数np=2。设置死区时间为3 us,中断周期为250 um(即开关频率为4 kHz),电机采用标么值,电压空间矢量基准值为310 V,电机基准电流为8A,基准频率为50 Hz。给定频率为10 Hz进行实验,图8为所得实验结果,由结果分析可知,图8(a)所示为A相电压波形,相对于电容中点O为3个电压等级,分别为0、±Udc;图8(b)为逆变器输出线电压波形,为5个电压等级,分别为0、±Udc/2、±Udc;图8(c)为所测的A、B两相电流,波形为正弦且相差120°;图8(d)为电机由启动至3.5 s接受停止信号的转速波形,以上结果表明该改进算法的可行性和正确性。
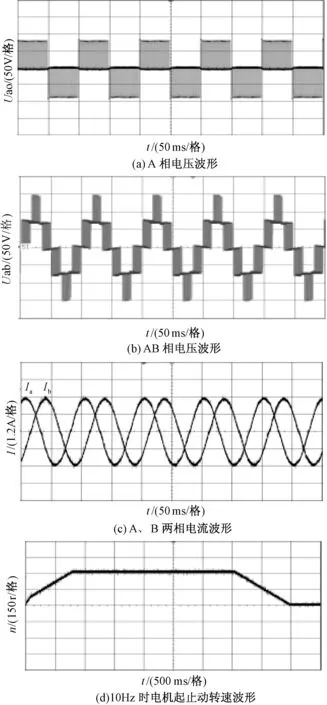
图8 实验波形
6 结论
本文所提出改进的SVPWM算法,克服了传统算法计算繁琐的缺点,简化了计算方法,编程简单,易于实现,并在异步电动机矢量控制系统中得以验证,为中高压变频器的设计以及高性能变频调速系统的研究提供了参考价值。
[1]何湘宁, 陈阿莲. 多电平变换器的理论和应用技术[M]. 北京: 机械工业出版社,2006.
[2]RODRIGUEZ J, LAI J S, PENG F Z. Multilevel inverters: a survey of topologies, controls, and applications[J]. Industrial Electronics IEEE Transactions on, 2002, 49(4):724-738.
[3]樊英杰, 张开如, 韩璐,等. 基于优化SVPWM三相VSR的仿真与研究[J]. 电测与仪表, 2015,12(52):40-43.
[4]赵辉, 李瑞, 王红君, 等. 60°坐标系下三电平逆变器SVPWM方法的研究[J]. 中国电机工程学报, 2008, 28(24):39-45.
[5]吴斌, 卫三民, 苏位峰, 等. 大功率变频器及交流传动[M]. 北京: 机械工业出版社, 2008.
[6]彭咏龙, 黄潇潇, 李亚斌. 基于SVPWM的高功率因数三相混合开关型整流电路研究[J]. 电力科学与工程, 2013, 29(6):23-29.
[7]何登,李春茂,华秀洁, 等. 一种简化三电平SVPWM方法研究[J]. 电力电子技术, 2014, 48(5): 74-76.
[8]阮毅, 陈伯时. 电力拖动自动控制系统[M]. 北京: 机械工业出版社, 2009.
[9]吴恩周,马小军.感应电机变频调速系统的效率优化控制仿真研究[J]. 电力科学与工程, 2016, 32(4):28-31.
[10]任志斌. 电动机的DSP控制技术与实践[M]. 北京: 中国电力出版社, 2012.
[11]高辉. 基于转子磁链定向矢量控制三电平变频器的设与研究[D].沈阳:东北大学, 2012.Research and Application on an Improved SVPWM Algorithm for Vector Control
LU Jinsheng, DONG Yongkao(College of Electrical Engineering and Automation, Shandong University of Science and Technology, Qingdao 266590, China)
Aiming at the downsides of the classical SVPWM for thee-level inverter, known as huge calculation amount of trigonometric functions and large occupation of the micro-processors memory, this paper proposes an algorithm of thee-level inverter SVPWM based on normalized value. It simplifies the calculation methods, improves the efficiency of digital implementation and overcomes the shortcomings of traditional computing methods. A TMS320F2812-based induction motor vector-control platform is built to verify the simple thee-level inverter SVPWM algorithm. The experimental results confirm that the system has small overshoot,fast starting time and good voltage and current waveform,which verify the validity and provide the basis for the improved algorithm of thee-level SVPWM.
three-level inverter; SVPWM; normalized value; vector control; DSP
2016-06-20。
鲁金升(1990-),男,硕士研究生,研究方向为电力电子及交流传动,E-mail:827536866@qq.com。
TM464
A DOI:10.3969/j.issn.1672-0792.2016.09.004
