UTC(NTSC)远程高精度复现方法研究及工程实现
2016-11-11刘娅陈瑞琼赵志雄李孝辉
刘娅,陈瑞琼,赵志雄,李孝辉
UTC(NTSC)远程高精度复现方法研究及工程实现
刘娅1,2,陈瑞琼1,3,赵志雄1,2,李孝辉1,2
(1. 中国科学院 国家授时中心,西安 710600;2. 中国科学院 时间频率基准重点实验室,西安 710600;3. 中国科学院大学,北京 100049)
中国科学院国家授时中心建立了与协调世界时(UTC)同步的UTC(NTSC),为了能让更多用户使用溯源到UTC的高精度时间频率信号,开发了UTC(NTSC)远程高精度复现系统,解决了标准卫星共视方法测量存在间断,且不能实时输出比对结果的问题。试验表明,复现时间与UTC(NTSC)偏差小于2ns,频率准确度优于1×10-15。详细介绍了UTC(NTSC)远程高精度复现系统的工作原理和实现方法,以及为提高复现精度、增强系统可靠性采用的技术手段。
时间溯源;协调世界时(UTC);时间复现;卫星共视
0 引言
中国科学院国家授时中心承担着我国标准时间的产生、保持和发播任务,其守时系统是国家不可缺少的基础性工程和社会公益设施,拥有居世界第四位的铯原子钟、氢原子钟组成的守时原子钟组,通过卫星双向时间传递、精密单点定位、卫星共视等远距离时间比对手段与国际标准时间比对。国家授时中心建立和保持与协调世界时UTC同步的国家标准时间UTC(NTSC),与UTC之间的偏差常年保持小于10ns。将建立的国家标准时间,通过多样化手段提供给各行业用户,服务于我国国民经济发展是国家授时中心的核心任务之一。
目前,针对不同时间频率精度需求用户,国家授时中心已经建成的授时手段及其主要性能指标如表1所示。
表1 主要授时手段及其性能汇总表

由表1可知,各种授时手段基本覆盖了对时频信号各种不同精度的需求,但各行业各类工作对时间频率信号的精度需求是不同的,需要进一步加以细分。对于在1~10ns范围内的精度需求,卫星导航系统单向授时不能满足该精度需求,而卫星共视、卫星双向比对、光纤时间频率传递方法的性能满足要求,但是只适用于小范围点对点的比对,并且成本较单向授时等方法高许多,另外卫星共视和卫星双向比对结果不能实时输出也制约了一部分用户需求的满足,需要一种性价比高且适宜广泛使用的手段来满足10 ns以下精度的用户需求。
对于大多数时间频率标准信号的用户,得到高精度的UTC信号,并应用它为自己的行业服务是主要目标,不一定具备更多的条件深入参与时频信号的生成与保持工作,因此,需要一种一揽子方案为用户直接提供标准时间频率信号。本文作者设计并在工程上实现了一套UTC(NTSC)的远程时间复现系统,为用户提供溯源到UTC的标准时间频率信号,同步偏差小于10 ns。
1 UTC(NTSC)远程复现需求分析
1.1 时间比对与复现的区别
使两个地方独立运行的时钟源具有统一的时间,需要经过时间传递、时间比对和时间同步三个过程。通过时间传递、时间比对和时间同步过程,可以将参与其中的多台时钟同步到同一时间,若作为参考的时钟是一个地区、国家,或是全世界的时间标准,则上述时钟实现了向标准时间的溯源。国际标准组织(ISO)对溯源的定义更为严格,规定溯源是一个连续、持续的时间比对过程,且溯源的对象必须为国家标准或国际标准。
UTC(NTSC)时间复现系统是国家授时中心根据当前具备的装置资源条件,结合市场对高精度时频信号、时间溯源等服务需求而建立的一套系统。它旨在解决在用户所在地复现出UTC(NTSC)时间频率信号,能自动连续运行、持续保持溯源到UTC。
根据UTC(NTSC)时间复现与相关定义可知,时间复现涉及时间比对、时间同步和时间传递等多方面内容,时间比对仅是时间复现所需的一项关键技术。当前可用的时间远距离比对方法很多,如光纤时间频率传递、卫星共视、卫星双向时间频率传递等均能实现纳秒甚至亚纳秒级比对,但考虑到 UTC(NTSC)复现的性能、价格,以及可实现性等因素,并结合市场实际需求,卫星共视被认为是较为理想的远距离时间比对方法。
1.2 远程时间校准研究现状
基于GPS卫星共视法的时间频率传递是目前时间频率远距离比对的主要方法之一。美国国家技术标准研究院(NIST)较早建立了基于GPS共视的溯源系统,称为频率测量与分析服务(FMAS)系统,用于对用户的石英频标、铷钟、铯钟等频率源进行远距离的校准,系统1d的频率测量不确定度为2×10-13。共视比对数据主要采用网络E-mail方式进行定期交换,得到各地用户时间相对于UTC(NIST)的时间偏差。这种方法的优点是用户不需要将自己的频率源送到NIST去校准,通过远程时间比对,在本地就可以获得校准结果,这也是时频测量区别于其他物理量计量的重要特征。不足之处是存在一定的时间滞后,只能事后得到校准结果。随着计算机技术和互联网技术的发展,NIST进一步发展建立了接近实时的网络服务模型,用户通过上传共视数据到指定ftp服务器,然后应用服务器上的软件可自动解算得到校准结果,但仍不能使用户实时获得校准结果[1-2]。
英国皇家物理实验室(NPL)、日本计量综合中心(NMIJ)等机构[3-4]也有与FMAS类似系统的相关报道。
但遗憾的是目前还没有一套系统既满足远程持续时间比对,又能实时根据比对结果实施驾驭,实现与标准时间同步,溯源到UTC的需求,本文建立的UTC(NTSC)时间复现系统即为解决上述问题。
1.3 UTC(NTSC)远程复现应用价值
随着科学技术的发展,不断涌现出更高性能的频率源,一定程度上讲,超高精度的频率源如果不能与标准时间或其他时间标准同步,独立运行的“绝对”时间并没有太多意义,高精度的异地时间频率同步、标准时间的异地复现才是根本需求。
UTC(NTSC)远程复现的重要性体现在卫星导航、基础科学、天文观测、国防安全、通信以及金融等国防、民用各个领域。下面介绍几种典型的应用:
1)数字通信网的时间同步性能检测对UTC(NTSC)复现的需求
数字同步网是通信网络中重要的基础支撑网。目前通信同步网普遍采用分布式多基准时钟(混合同步)方式,在通信行业标准《数字同步网的规划方法与组织原则》(YDN-177-1999)中,明确提出今后要以“可验证的全同步网为规划目标”。高精度同步性能检测技术是其中的薄弱环节。因为现行同步网中设置有多个时钟基准源,常采用多数表决技术选择时钟基准源。尽管采用了较多的检测技术,但是与通信技术的发展及其对于同步的高精度要求,还是有较大的差距。原则上网内所有数字通信设备的时钟都应最终溯源到一个满足相应标准要求性能的基准时钟上,方可保证全网的同步质量。目前最关键的是缺少可信任的基准参考源,使用UTC(NTSC)远程复现技术,能实现基准源的唯一性,并且通过在各区域设置UTC(NTSC)复现终端,实现区域之间时间的高精度同步,解决数字同步网中时间同步性能检测的问题。
2)天文观测对UTC(NTSC)复现的需求
在天文观测领域,甚长基线干涉测量技术(VLBI)可以在距离数千公里的两观测站,观测同一射电源发出的信号,然后根据两地时差作相关处理,最终得到超高分辨率的干涉信号,其中两地时钟的同步精度决定了观测精度,要求频率准确度约在10-13量级,甚至提出准确度和稳定度达到10-15量级的要求。VLBI传统的时钟同步方案是在各站使用独立运行的高精度原子钟,在VLBI比对中,为了解决各独立运行的高精度原子钟间的时间同步存在系统偏差问题,科学家们不得不通过后期处理方法降低其影响。使用UTC(NTSC)复现技术能很好地解决上述问题,取代现有的高精度原子钟,通过持续不间断地与标准时间UTC(NTSC)比对,在各站点复现出UTC(NTSC)信号,保证各站点时间同步[5]。
3)航天飞行试验对UTC(NTSC)复现的需求
导弹和航天运动特点决定了地基、天基测量系统分布在相距甚远的空间,各地的时间同步精度将影响联合观测结果。如飞行器试验测量需要由分布于不同地点的很多测量系统来统一实施,将不同测量地点的测量结果进行统一处理和加工。这对各地时间同步提出了较高的要求,各测量站间时间同步的误差必然成为测量误差中的一个重要误差源。不同系统、体制、工作方式和设备受时间同步误差的影响也不一样,各站间时间同步精度范围约在5~300 ns之间,一些新的测量系统设备对测量站间的时间同步误差提出了小于10 ns量级要求,这就要求各站间时间频率的高度统一。UTC(NTSC)复现终端能在用户所在地复现溯源到UTC的时间频率信号,满足航天飞行试验的需求。
2 UTC(NTSC)远程复现方法
2.1 无间隙共视比对可行性分析
标准GPS共视法的技术指南发布于1994年,当时处理器处理数据的速度、接收机的性能,以及GPS一家独大的局面导致其实施SA干扰等客观条件,与目前情形已不可同日而语,当时需要考虑的许多误差因素如今已经不复存在。本文使用的卫星共视方法是根据当前技术现状进行设计的,与标准方法相比,最大的区别是UTC(NTSC)复现使用了灵活、无间断的观测周期,并且实时产生比对数据。下面对设置灵活观测周期共视比对的可行性进行分析。
国际时频咨询委员会(CCTF)于1994年通过了共视法时间频率相关技术指南,统一了共视接收机软件的处理过程和单站观测文件的格式。该指南约定一次完整的共视观测周期为16 min,其中2 min为接收机锁定准备时间,然后持续观测13 min,另外1 min时间用于数据处理和为下次跟踪做准备。为符合GPS卫星运行轨道周期,该指南还规定每天比前一天提前4 min开始共视测量[6]。观测周期规定为 13 min的主要原因是为利用星历中12.5 min更新一次的电离层时延数据进行电离层延迟改正,当前数据处理器、定时接收机等器件的处理速度完全能满足观测与数据处理同步进行且不间断的要求,因此主要从电离层延迟改正方面分析任意共视间隔的可行性。电离层对GNSS信号的折射效应产生的时间延迟,称为电离层附加时延。对GNSS用户而言,尤其单频接收机用户,电离层延迟效应是影响导航定位精度和准确度的主要误差源之一,特别是2000年5月美国取消SA政策后,电离层延迟已经成为导航定位中最显著的误差源。
常用的电离层延迟计算方法有Klobuchar模型、双频伪距计算电离层延迟和利用IGS事后发布的格网点电子含量计算电离层延迟。若使用单频接收机执行共视比对,Klobuchar模型改正电离层时延是常用方法,利用星历中的电离层参数计算电离层时延,电离层时延改正精度对星历数据依赖度高。试验发现,在星历有效期内,使用Klobuchar模型能平均消除约50%的电离层延迟;由双频伪距计算电离层延迟需要使用双频接收机,依据电离层的色散特性,从双频伪距观测值可以计算出电离层延迟,消除大部分电离层延迟的影响,较根据模型改正电离延迟有显著改善,且实时性高,双频伪距法的不足之处是受伪距测距精度影响,存在随机误差[7];对于实时性要求不高的情况,利用IGS的事后电离层产品改正电离层延迟是理想选择,试验证明该方法能消除90%以上的电离层延迟的影响。
UTC(NTSC)复现终端设计任意观测周期的目的是希望降低对星历中电离层延迟参数的依赖,并能减小电离层延迟的影响,因此应用双频接收机执行卫星共视比对是理想的选择,为保证电离层延迟改正量的精度,可以通过数据平滑处理平滑伪距观测值,消除大部分电离层延迟的影响。
2.2 UTC(NTSC)远程复现原理
实现UTC(NTSC)远程复现需要两方面的技术支撑,分别是高精度远程时间比对和根据比对结果实现时间同步的技术。鉴于GPS卫星共视法具有可以抵消星钟影响,并部分消除卫星位置误差、对流层和电离层附加时延误差的优点。卫星共视法能满足UTC(NTSC)远程复现所需远程时间比对的基本要求,但需要解决两方面问题:一是完整的观测周期为16 min,只有13 min有观测数据,存在3 min观测间隙,而《美国海军计量和校准大纲》中指出:“要保证测量结果通过不间断校准链路溯源到公认的基准”。因此存在间断的链路不符合溯源的要求;二是数据事后交换处理模式,导致比对结果生成严重滞后,而钟驾驭需要根据实时比对结果控制其输出。另外,随着GLONASS、北斗、Galileo等卫星导航系统的逐渐发展完善,以及接收机技术的进步,多系统融合成为一大发展趋势,大大增加共视比对可用卫星数量,提升系统的可用性,但需要解决不同卫星导航系统引入的接收机时延误差校准等问题,解决使用不同卫星导航系统共视的兼容性问题。
为解决上述问题,实现UTC(NTSC)远程复现,本文提出了一种新的实时共视方法,其基本原理与卫星共视相似,如图1所示。远程时间比对基准终端与UTC(NTSC)复现终端同时观测所在地可视的GNSS卫星,以约定的观测周期处理测量数据,得到本地参考时间与各颗卫星钟时间的偏差,在完成一个观测周期后将数据通过网络发送到数据分析处理中心,抵消各星钟及共有误差的影响,得到两地参考时间之差,反馈给UTC(NTSC)复现终端,UTC(NTSC)复现终端收到数据后结合历史结果,生成对本地原子钟输出参考信号的频率驾驭量,控制原子钟的输出,使其保持与远程时间比对基准终端的参考信号同步。由于远程时间比对基准终端的参考信号来自UTC(NTSC),则在用户所在地的原子钟输出保持与UTC(NTSC)同步,实现UTC(NTSC)[8]远程复现。

图1 UTC(NTSC)复现工作原理框图
该方法的实时性、无间隙设计体现在各地终端的观测与数据处理同步进行,测量持续无观测间隙,测量结果能在一个观测周期结束后实时计算出来。另外由于各终端独立运行,不相互依赖,任意UTC(NTSC)复现终端加入或退出该系统都不会影响其他终端运行。理论上,该系统可支持无限多复现终端同时工作,终端数量主要受限于数据处理中心的运行能力,相比传统的点对点共视,系统灵活度大大提升。
该方法的主要优点包括:
① 持续观测无间隙,各观测周期之间无间隙,持续比对,满足时间溯源的基本要求;
② 观测周期可灵活设置,根据观测效果、观测需求,数据分析处理中心可自由设置观测起始时刻、观测周期,增强系统的适应性;
③ 实时比对结果生成,观测与数据处理并行执行,实时反馈比对结果,保证复现UTC(NTSC)的同步性能;
④ 各UTC(NTSC)复现终端独立运行,加入或退出系统不影响其他终端及整个系统的运行;
⑤ 融合使用所有卫星导航系统的可视卫星,提高系统可用性,增加远程复现终端与国家授时中心之间基线长度;
⑥ 使用国家标准时间UTC(NTSC)作为参考,国家授时中心标准时间通过国际时间频率比对链路溯源到UTC,因此复现的时间可溯源到UTC。
3 UTC(NTSC)远程复现系统实现技术
3.1 工程实现难点
工程实现UTC(NTSC)远程复现系统,最大的难点在于系统的可靠性、可用性设计。因为任何设备、器件都有失效或部分失效的可能,关键在于核心部件的可靠性设计。图1所示本系统中远程比对基准终端、数据分析处理中心和导航卫星是整个系统的核心,若其中任意部件失效或是没有足够的可视卫星,就有可能导致系统崩溃。因此为了增强系统可靠性,采取了以下3方面措施:
① 使用不少于3台的远程比对基准终端结合的方式,通过3台终端互比的测量结果,设计优选、淘汰策略和数据融合算法,提升远程比对基准终端的可靠性;
② 在数据分析处理中心的可靠性设计方面,使用双机热备、网络存储和磁盘阵列(RAID)保证软件运行环境的可靠性,同时为确保软件可靠性,软件自身设计了故障告警,另外设计了独立运行软件,辅助监视数据分析处理中心软件的异常状态;
③ 使用多模接收机,可接收GPS、北斗、GLONASS等卫星导航系统的卫星信号,结合使用所有可视卫星实施共视,增加可用卫星数量,一方面可以增大远程比对的基线长度,另一方面还可以在部分卫星导航系统不可用时保证系统仍能正常运行[9];
④ 使用卫星模拟器,模拟各星座卫星,单独校准接收机各通道时延,减小由于使用不同卫星导航系统卫星共视带来的系统性偏差。
3.2 系统总体结构
UTC(NTSC)远程复现系统的基本组成如图2所示,包括一个数据分析处理中心、若干台远程时间比对基准终端、若干台UTC(NTSC)复现终端、远程数据传输网络和一台时延校准终端。数据分析处理中心负责通过远程数据传输网络定期收集远程时间比对基准终端和UTC(NTSC)复现终端的观测数据,实时计算比对结果并反馈给各复现终端。时延校准终端用来定期标校各终端设备的相对时延。

图2 UTC(NTSC)远程复现系统的基本组成
3.3 UTC(NTSC)复现终端实现
UTC(NTSC)复现终端由硬件和软件组成,硬件组成框图如图3所示,包括GNSS定时接收机、时间间隔计数器、原子钟、计算机和远程数据传输模块等。软件包括远程时间频率校准软件和原子钟驾驭软件。
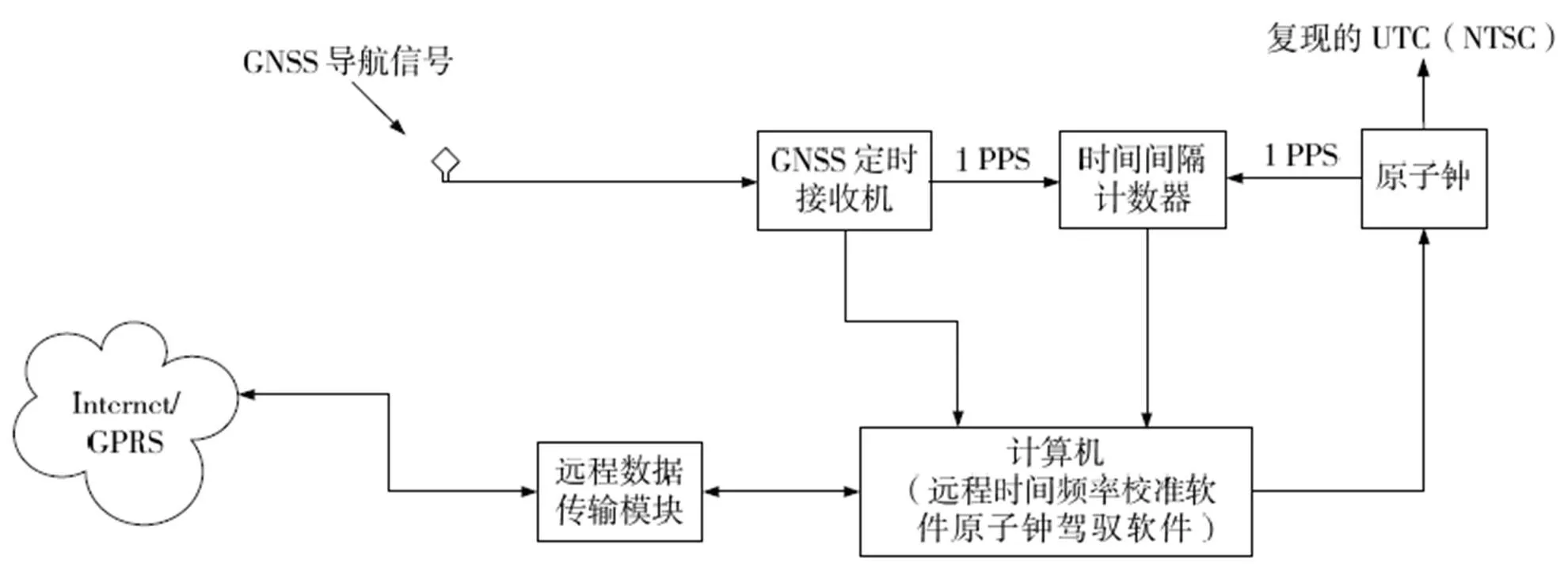
图3 UTC(NTSC)复现终端的硬件组成框图
复现终端采用模块化结构,去除原子钟和钟驾驭软件就成为一台校准终端,可以用于测量本地时间与UTC(NTSC)的偏差,且实时将钟差数据反馈给用户。
3.3.1 复现终端关键模块实现
为便于集成,GNSS定时接收机和时间间隔计数器均被设计为PCI插卡式,安装到计算机中。GNSS定时接收机使用的是多模接收机的OEM板,通过改造、适配后满足系统集成要求。
时间间隔计数器是由国家授时中心自行研制的PCI插卡式时间间隔计数器,其主要技术指标如下:测量范围为-100~100 s,测量分辨率125 ps,单次测量不确定度优于1 ns,多次测量不确定度优于0.4 ns。插卡式时间间隔计数器是采用二级内插原理实现了高精度大量程时间间隔的测量。图4所示为计数器的测量原理。

图4 PCI插卡式时间间隔计数器的测量原理
从图4可以看出,待测时间间隔可表示为:
图5 PCI插卡时间间隔计数器的实物图
远程数据传输使用互联网和中国移动无线网络两套方案,互为备份,优先采用互联网实现数据传递,在不具备接入互联网条件时,使用GPRS调制解调终端实现数据的远程传递。
原子钟用于在所在地产生并输出物理信号,要求原子钟可以接受外同步参考输入,并且能接收频率、相位调整量,控制其输出信号。另外,为进一步减小终端体积,还可以使用满足性能和功能要求的芯片型原子钟。
远程时间频率校准软件和原子钟驾驭软件运行在计算机中,图6为远程时间频率校准软件运行截图。校准软件的主要功能是采集和存储定时接收机输出的星历、时间间隔计数器输出的时差测量值,监视各模块的工作状态,采用最小二乘法对一个观测周期内的数据拟合,取中点值作为当前各颗卫星的时间与本地参考时间的钟差,通过网络将数据发送给数据分析处理中心,接收来自数据分析处理中心计算得到的本地参考时间与标准时间UTC(NTSC)的钟差,将该结果发送到远程时间频率驾驭软件。

图6 远程时间频率校准软件运行图
远程时间频率驾驭软件属后台运行软件,将远程时间频率校准软件提供的实时钟差比对结果,结合历史钟差数据,拟合估计原子钟信号与UTC(NTSC)信号的频率差、频率漂移和相位差,用于预测下一观测周期的时差结果,生成原子钟的驾驭量,控制原子的输出,使原子钟的输出与UTC(NTSC)的钟差尽可能小,或是保持在一定区间内。同时还输出复现UTC(NTSC)与UTC(NTSC)的偏差预报模型,供用户溯源使用。
3.3.2 复现终端工作流程
使用时间间隔计数器测量GNSS定时接收机输出的1 PPS与原子钟输出1 PPS的时间偏差,通过PCI接口输出到计算机中,计算机中运行的远程时间频率校准软件采集时差测量结果,结合GNSS定时接收机实时输出的星历数据,计算当前观测周期各可视卫星钟与本地参考时间的时差,将其通过远程数据传输模块传送到数据分析处理中心,处理中心收集同一周期各地观测数据,依据卫星共视原理,计算各地时间与标准时间UTC(NTSC)之差,并进一步使用设备时延量进行修正,最后通过远程数据传输模块将测量结果返回给各地UTC(NTSC)复现终端的计算机,由计算机中的原子钟驾驭软件根据历史和当前测量结果,预测原子钟的漂移率,生成对原子钟的驾驭量,逐步减小原子钟输出时间信号与UTC(NTSC)之间的偏差,直至使原子钟输出时间与标准时间UTC(NTSC)的偏差保持在合理范围内,同时原子钟驾驭软件还向用户提供当前输出物理信号的溯源偏差预报模型,实现在本地复现信号与标准UTC(NTSC)之间的偏差小于10 ns。
UTC(NTSC)复现终端由室内机和室外天线两部分组成,图7是含原子钟的室内机实物照片。图8为数据分析处理中心软件主界面截图,该软件主要负责收集远程时间比对基准终端、UTC(NTSC)复现终端的测试数据,计算各复现终端与标准时间的偏差,返回给各复现终端。图9为处理中心软件显示某一复现终端的实时测量结果截图。

图7 UTC(NTSC)复现终端的实物图

图8 数据处理中心软件主界面图

图9 数据处理中心软件子界面图
4 UTC(NTSC)远程复现性能测试
为评估UTC(NTSC)远程复现的性能,设计了多项针对性测试试验,包括零基线试验,测试 UTC(NTSC)复现终端所用无间断共视比对方法的比对不确定度;针对用户对性价比不同复现终端的需求,使用不同类型原子钟作为复现终端的信号源,测试比较各类型终端的性能;另外,为进一步提高UTC(NTSC)的复现性能,开展了远程时间比对性能改进试验。下面分别介绍这些试验情况。
4.1 无间隙共视比对不确定度测试
零基线共钟比对方法是评估共视比对设备测量不确定度的常用方法,测量原理如图10所示。因为时延校准终端与远程时间比对基准终端、UTC(NTSC)复现终端的远程比对结构完全相同,因此可以使用时延校准终端评估远程比对不确定度。

图10 零基线共钟测试共视比对不确定度原理图
将远程时间比对基准终端与时延校准终端零基线安装,使用国家授时中心的标准时间UTC(NTSC)作为两个终端共同的参考,数据分析处理中心实时计算两终端实际测得的时差,设置观测周期为10 min,试验持续10 d。
测试试验时间为2015年11月6日08:40:00 UTC至2015年11月16日08:40:00 UTC,测试结果如图11所示。因为两终端零基线安装,并且使用同一信号源作为参考,假设信号参考及传输路径完全相同,在测量结果中忽略参考信号的影响,则时差测量结果主要反映两终端的设备时延差,用于校准远程时间比对结果。零基线共钟试验实测时差均值为-1.68 ns,均方根为1.82 ns,标准差为0.78 ns。均值即为两终端的设备时延差值,可以在使用中将其扣除,不影响系统使用。标准差是时差测量结果的离散程度,反映了使用该无间断共视比对方法,时间比对测量不确定度为0.78 ns。

图11 零基线共钟无间断共视比对测试结果
根据上述零基线共钟比对试验测试结果可知,UTC(NTSC)复现终端的远程时间比对基于伪码测距,无间隙共视比对方法实现,观测周期为10min时,比对不确定度为0.78ns,优于传统共视方法2ns[10]的不确定度性能。
4.2 基于不同性能原子钟的UTC(NTSC)复现性能测试
为了满足用户对时间频率信号性能的需求,使用不同性能原子钟设计实现了两款UTC(NTSC)复现终端,一款使用高性能原子钟,其主要特点是短期稳定度性能好,秒级稳定度优于5×10-12,频率准确度5×10-13;另一款使用普通型原子钟,主要特点是成本低,体积小,秒级稳定度优于2×10-11,频率准确度为5×10-11。
比较试验在已经安装了UTC(NTSC)复现终端的陕西洛南和海南三亚之间进行,洛南与位于临潼的国家授时中心之间的基线长度约70 km。在洛南安装了配置高性能原子钟的UTC(NTSC)复现终端;三亚与临潼之间的基线长度约1750km,在三亚安装了配置普通性能原子钟的UTC(NTSC)复现终端。为了更好地评估复现终端复现信号的性能,使用卫星双向时间比对设备测试复现信号与UTC(NTSC)主钟信号的偏差,分别在临潼、洛南和三亚使用卫星双向移动校准站测试。测试结果分别如图12和13所示。
在洛南使用高性能原子钟的UTC(NTSC)复现终端测得复现时间与UTC(NTSC)主钟之差如图12所示,复现时间与标准时间偏差小于2 ns,标准差为0.82 ns,频率准确度为9.54×10-16,频率信号的小时稳定度为1.38×10-13,万秒稳定度为8.52×10-14。

图12 配置高性能原子钟的UTC(NTSC)复现测试结果
在三亚使用普通性能原子钟的UTC(NTSC)复现终端测得复现时间与UTC(NTSC)主钟之差如图13所示,复现时间与标准时间偏差小于10 ns,标准差为1.75ns,频率信号的小时频率稳定度为2.47×10-12,万秒频率稳为9.54×10-13,频率准确度为1.163×10-14。

图13 基于普通性能原子钟的UTC(NTSC)复现测试结果
试验发现,UTC(NTSC)复现终端输出信号的性能与所用原子钟性能紧密相关,配置高性能原子钟的复现终端同步精度为2 ns,频率准确度从5×10-13提升至1.0×10-15;配置普通型原子钟的复现终端同步精度为10ns,频率准确度提升了两个数量级。可见原子钟性能越高,复现信号的时间同步精度、频率稳定度、准确度越高。但从复现效率来看,使用普通原子钟实现复现对其性能改善更为明显。另外复现信号对原子钟输出的短期稳定度性能没有影响,主要显著提升频率信号的准确度。
4.3 性能改进试验
UTC(NTSC)远程复现终端输出信号的性能与远程时间比对性能、原子钟性能息息相关,为了进一步提高复现信号的性能,配置更好的原子钟是一种解决方案,降低远程时间比对不确定度是另一种性价比更高的解决方案。
为了提高比对精度,在远程时间比对中尝试采用载波相位平滑伪距等各种方法,同样采用零基线共钟测试试验检验该方法的实际性能,使用所有可视的北斗卫星和GPS卫星联合共视,测试结果如图14所示,以10min为一个观测周期,无间隙测量,持续测试约一周,统计钟差结果的标准差为0.295ns,较单使用伪码测距法0.78ns的标准差有了明显提升,证明载波相位平滑伪距有益于改进远程时间比对不确定度。

图14 载波相位平滑伪距改进远程时间比对不确定度
5 结论
建立UTC(NTSC)远程复现系统,主要目标是为满足溯源到国家标准时间,以及要求提供纳秒量级时间同步精度的时频信号用户的需求。本文通过需求分析、理论研究、工程实践结合试验验证,提出一种无间隙、多星座卫星共视的实时比对方法,满足了溯源比对链路连续性和持续性要求,研制了一套UTC(NTSC)复现系统,配置高性能原子钟的UTC(NTSC)复现终端实现时间同步偏差±2 ns,复现信号的频率准确度优于1.0×10-15。
UTC(NTSC)复现系统的主要优点包括:
① 溯源标准为国际标准时间UTC,物理信号来自国家标准时间信号UTC(NTSC);
② 灵活设置观测周期,实现无间隙比对,实时反馈比对结果,符合溯源链路要求;
③ 用户只需要安装一套UTC(NTSC)复现终端,即可溯源到国家标准时间,较使用标准卫星共视比对,简化了用户设备,降低了成本;
④ 使用含北斗卫星的多星座卫星进行共视比对,结合使用伪码测距和载波相位平滑等改进技术,和多基准站联合观测技术,提高远程比对精度,提升系统的可用性和可靠性;
⑤ 复现的时间频率信号的频率长期稳定度、准确度较自由运行原子钟有了显著提升,用户可以获得更高性价比的信号源;
⑥ 系统自动运行,含监视与自恢复功能,操作使用简单。
参考文献:
[1] MICHAEL A, LOMBARDI. A NIST disciplined oscillator: delivering UTC(NIST) to the calibration laboratory[J]. NCSL International Measure, 2010, 5(4): 46-54.
[2] LOMBARDI M, NOVICK A N. Remote time calibrations via the NIST time measurement and analysis service[J]. The Journal of Measurement Science, 2006, 1(4): 50-59.
[3] 左飞. 新型的远程时间频率校准系统[D]. 北京: 北京交通大学, 2014.
[4] 高小珣, 高源, 张越, 等. GPS共视法远距离时间频率传递技术研究[J]. 计量学报, 2008, 29(1): 80-83.
[5] 王力军. 超高精度时间频率同步及其应用[J]. 物理, 2014, 43(6): 360-363.
[6] 杨旭海. GPS共视时间频率传递应用研究[D]. 西安: 中国科学院国家授时中心, 2003.
[7] 广伟. GPS PPP时间传递技术研究[D]. 西安: 中国科学院国家授时中心, 2012.
[8] 和涛, 张慧君, 李孝辉, 等. 基于UTC(NTSC)的时间频率远程校准与溯源研究[J]. 电子测量技术, 2013, 36(5): 15-20.
[9] 江志恒. GPS全视法时间传递回顾与展望[J]. 宇航计测技术(增刊), 2007: 53-71.
[10] 曾亮. 时间频率标准远距离校准系统[D]. 成都: 成都电子科技大学, 2008.
Research on high precision method for remotely reproducing UTC(NTSC) and its realization
LIU Ya1,2, CHEN Rui-qiong1,3, ZHAO Zhi-xiong1,2, LI Xiao-hui1,2
(1. National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China;2. Key Laboratory of Time and Frequency Primary Standards, National Time Service Center,Chinese Academy of Sciences, Xi’an 710600, China;3. University of Chinese Academy of Sciences, Beijing 100049, China)
The NTSC (the national time service center, the Chinese academy of sciences) has established and maintained the UTC(NTSC), a local universal time coordinated, which is synchronized with the UTC. In order to allow more users to acquire the high precision time and frequency signal which is traceable to UTC, we have developed a high precision system for remotely reproducing UTC(NTSC). This system can solve some problems such as that there is dead time for the standard satellite common view measuring and there is no real-time output of comparison results. A recent experiment demonstrated that the time offset of reproduced time is less than 2 ns compared with UTC(NTSC) and the frequency accuracy is better than 1×10-15. The principle and implement of the system for remotely reproducing UTC(NTSC) with high precisionare introduced in detail, and the adopted techniques for improving the reproducing precision and enhancing the reliability are demonstrated.
time tracing; UTC(universal time coordinated); time reproducing; satellite common view
P127.1
A
1674-0637(2016)03-0178-15
10.13875/j.issn.1674-0637.2016-03-0178-15
2016-01-08
国家自然科学基金委国家重大科研仪器设备研制专项资助项目(61127901)
刘娅,女,副研究员,主要从事数字精密测频技术研究。
