基于超宽带通信的高精度定位系统设计
2016-11-10李园园李勇
李园园,李勇
基于超宽带通信的高精度定位系统设计
李园园,李勇
(中山职业技术学院,中山528404)
针对目前流行的室内定位技术定位精度差的问题,提出了基于STM32F103RBT6和DecaWave的单片收发一体射频芯片DW1000的超宽带(UWB)通信定位方案,设计了系统的软硬件,讨论了相关定位算法。系统中被测节点(Tag)与锚节点(Anchor)通过双向TDOA算法得到两者之间的距离,Tag与多个Anchor的距离通过UWB通信被汇总至定位服务器,由定位服务器三角质心定位算法测算出Tag的三维空间坐标。实验结果表明,系统在LOS环境下具有较高的精度,在NLOS环境下也具有良好表现。
室内定位;UWB;TDOA;三角质心算法
引 言
无线定位技术是利用射频信号和几种常用定位算法,实现定位、追踪和监测特定目标位置的技术。常见的定位技术有:①WiFi定位技术,该技术前期在室外定位上应用较多,但随着GPS的普及,关于WiFi定位技术的研究转移到室内定位,主要特点是应用成本低、定位空间广,但定位精度不高,能达到以米为单位的定位精度[1];②蓝牙定位技术,主要适用于室内定位,定位精度高于WiFi定位技术,室内环境对定位精度影响较大[2];③ZigBee定位技术,该技术基于IEEE802.15.4标准,ZigBee定位随着物联网技术的发展越来越受到关注,定位精度适中,可以实现以米为单位的定位精度[3];④UWB定位技术,在理论上可获得厘米级甚至更高的定位精度,在精确定位应用中极具潜力,是当前无线定位技术的研究热点[4]。
通过检测各移动节点(Tag)到锚节点(Anchor)的距离和角度,使用三边测量法、三角测量法或最大似然估计法计算标签节点位置。主要测距算法有:①TOA(Time Of Arrival),根据射频信号从标签节点到锚节点的传播时间来确定两者之间距离[5];②TDOA[6](Time Difference Of Arrival),利用标签节点与各锚节点信号的到达时间差,以及本系统中所使用的双向TDOA;③AOA(Angle Of Arrival),通过测量移动节点与到达的锚节点信号角度来确定标签节点位置[7];④RSSI(Received Signal Strength Indication),通过测定移动节点到达锚节点的信号强度来进行位置确定[8]。
1 系统整体结构
要在三维空间中实现定位,定位系统至少需要3个锚节点、1个被测移动节点、1台运行定位算法的定位服务器,系统整体结构如图1所示。在三维空间中,锚节点被安装在特定的已知位置,被测的移动节点在三维空间中可以随意移动。被测移动节点分别与各个锚节点之间采用TDOA算法确定两者之间的距离,然后被测移动节点将数据发送到定位服务器,由定位服务器根据定位算法计算出被测节点的空间位置[9]。锚节点与被测移动节点以及定位服务器端的接收器,在系统中采用相同的硬件结构,由软件分别实现不同的功能。
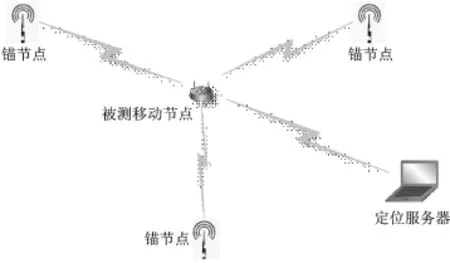
图1 系统示意图
2 硬件设计
系统中的的节点主要由系统电源管理部分、UWB射频收发模块、STM32主控部分构成,如图2所示。

图2 节点硬件结构图
2.1电源管理系统
锚节点在定位系统空间布局完成后,位置基本不会再移动,故采用外部直流电源供电,而被测节点则位于空间中的不确定位置,故采用板载的锂电池供电。电源管理系统实现电源的选择,以及锂电池的充电电路部分;同时该模块连接射频模块与STM32模块各自的LDO,给各模块供电。电源管理系统电路图如图3所示。
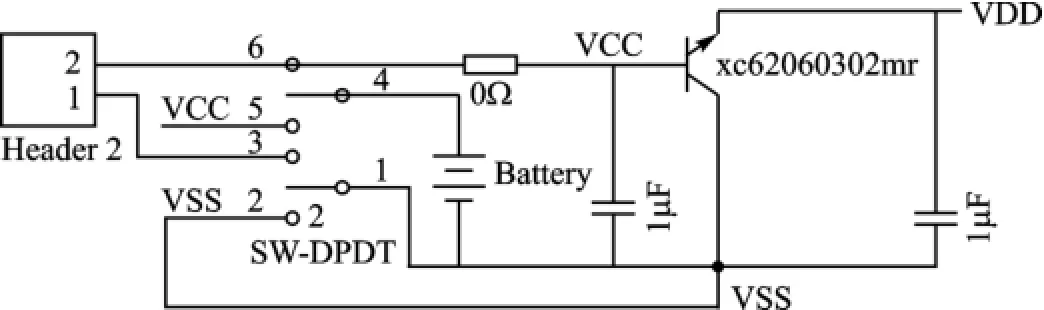
图3 电源管理系统电路
2.2UWB射频收发模块
UWB射频收发模块是本定位系统的核心部件,锚节点与移动节点使用相同的电路,通过软件来实现各自功能,锚节点与移动节点间通过射频通信以及双向TDOA算法来测量两节点之间的距离。
该模块的主要电路原理图如图4所示,图中的无线定位芯片DW1000是DecaWave发布的一款基于UWB技术的、兼容IEEE802.15.4-2011标准的射频芯片,该芯片主要有以下特点:单片芯片上集成遵循IEEE802.15.4-2011标准的低功耗UWB信号收发一体系统;采用双向TDOA测距算法,可使定位精度达到10 cm;可达6.8 Mbps的数据传输速率;支持较高的标签密度,在半径20 m内可容纳11 000个定位标签;优秀的抗多径衰落能力,在高衰落环境仍可以进行可靠的通信;超低功耗,可采用电池供电。
模块中的DW1000所使用的晶振频率为38.4 MHz,可由温度补偿晶体振荡器(TCXO)直接通过XTAL1引脚提供振荡源,但成本相对较高,本系统直接在XTAL1与XTAL2引脚间加入一个振荡频率为38.4 M Hz的石英晶振。对于石英晶体由于工艺产生的偏差,DW1000可通过fs_xtal寄存器进行-20~20 ppm的补偿,本系统选择Geyer公司型号为kx5t的晶振。
DW1000正常工作电压为3.3 V,部分片上资源可以直接由外部3.3 V供电,部分资源需通过片上LDO降压至1.8 V供电,这些LDO需通过相关引脚外接去耦电容,如图2中VDDDIG、VDDREG、VDDIF、VDDMS、VDDVCO、VDDCLK、VDDSYN均通过0.1μF的去耦电容接地。
芯片的射频收发范围为3~8 GHz,故系统中的平衡变压器T1以及陶瓷天线在选型时均需考虑工作频率,T1为TDK的HH M1595A1,陶瓷天线为Partron的ACS5200 HFAUWB。
马卜子村位于大佘太镇西部,全村村民以农业种植为主业,主要种植作物有玉米和葫芦。2017年,时任驻村书记的杨森同志带着几个来自华南农业大学作物营养与施肥研究室的技术人员来到村里,给农民们做水肥管理技术培训。“他们说要找几块示范田,对水肥管理进行全程的服务与跟踪,开展‘精准配肥’”,村民韩俊义告诉记者,“当时负责对接落实这项工作的是村委会干部刘玉。”
DW1000有8个GPIO,且均可配置为第二功能,本系统中不作其他用途,连接至接线端子,作为备用。SPICSn、SPICLK、SPIMOSI、SPIMISO连接至主控芯片STM32F103RBT6中SPI模块对应的引脚,作为DW1000与STM32F103RBT6的通信接口。
2.3主控芯片
STM32主控部分通过SPI总线对DW1000模块进行配置管理以及数据通信,被测移动节点还需要将距离数据打包,然后与定位服务器通信,定位服务器通过几何算法确定移动节点的最终位置。
系统中使用的控制芯片为意法半导体公司的STM32F103RBT6,该芯片基于32位Cortex M3内核,最高工作频率可达到72 MHz。该芯片具有以下特点:具有128 KB的程序存储空间,20 KB的SRAM空间;具有丰富的可编程I/O资源,以及A/D与D/A资源;多种通信接口,如SPI、I2C、UART以及CAN总线等接口;具有睡眠、停机和待机多种低功耗模式。根据以上特点,主控部分可以尽量做到低功耗,占用较少尺寸的空间。
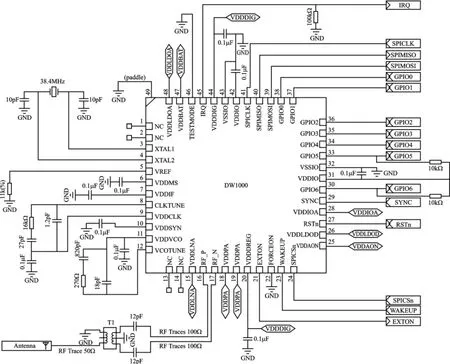
图4 射频原理图
3程序与算法设计
本文以Keil4为平台开发了锚节点与移动节点的程序,系统整体软件框架设计如图5、图6所示,软件框架主要分为3层:用户应用层、DWM API业务层、设备驱动层。其中DecaWare实现了DWM API业务层,以及驱动层部分代码。代码设计主要集中在驱动接口部分以及应用层,锚节点和被测节点采用相同的硬件,区别主要在于程序部分。
3.1测距算法
算法执行过程如下:
①Tag发送一条Poll给目标Anchor节点,并标记发送时间Tsp,然后进入开始侦听Anchor的Response消息的状态,如果一段时间没有消息,则Tag会超时,并再次发出Poll消息。
②Anchor侦听地址为自己的Poll消息,如得到消息,则标记接收时间Trp,并发出Response消息给Tag,同时标记发送时间Tsr。
③Tag收到Respond消息,标记接收时间Trr,然后将Tsp、Trr、Tsf打包进入一帧Final Message发送给Anchor,其中Tsf为该消息的发送时间(DW1000特殊功能)。
④Anchor接收到Final Message后,就有足够的信息计算出两者的距离。
则单边flight时间为:

两节点间距离为:

3.2定位算法
由双向TDOA算法测量Tag标签与3个Anchor标签的距离R1、R2、R3后,假设3个Anchor标签在空间中的坐标已知,且分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),被测Tag标签坐标未知,坐标为(x,y,z),可以得到以下方程组,解出方程组的两组解,再根据Anchor标签安装位置,即可以筛选出Tag标签的坐标。
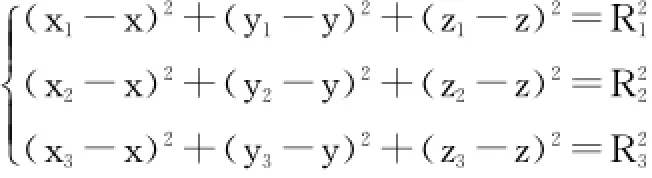
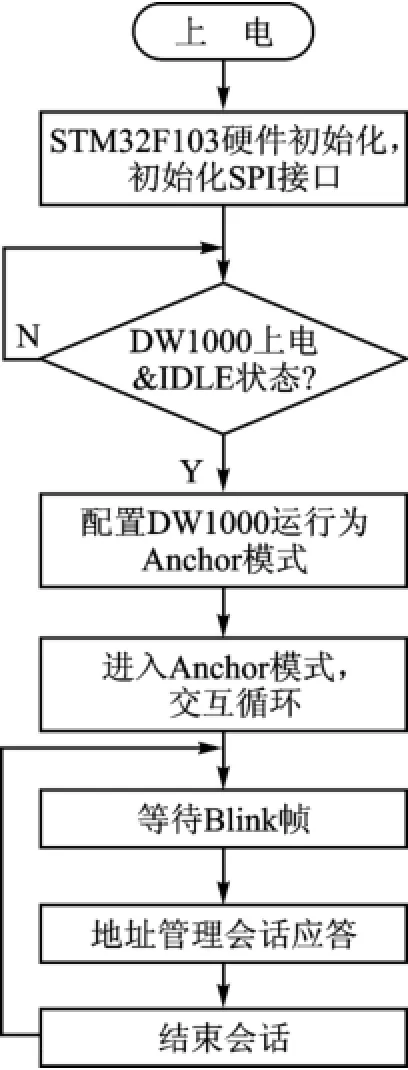
图5 锚节点程序流程

图6 移动节点程序流程
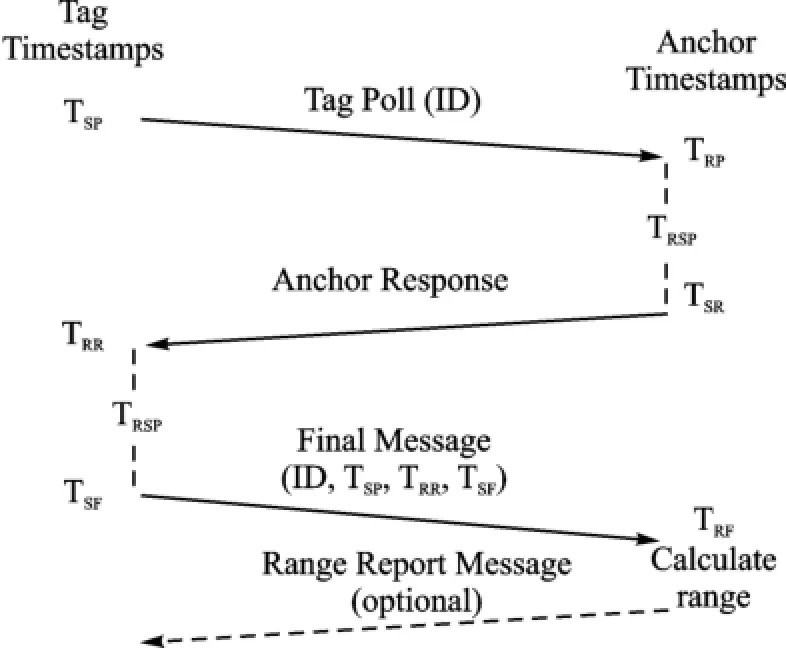
图7 双向TDOA算法
结 语
按照前文所述的软硬件结构搭建好系统并进行环境设置后,分别进行了Tag标签与Anchor标签之间的TDOA算法测试,以及整个系统三角质心定位算法[10]测距,测试结果如表1所列。

表1 定位误差测试表
从表中可以看出,UWB在直线测距中表现非常优秀,而且有较好的抗多径能力,定位算法的选择也将影响实际的定位精度。
与同属射频信号的蓝牙定位技术、ZigBee定位技术相比,UWB在定位精度上有着显著的优势,随着高精度室内定位市场的开发,UWB定位技术将受到更多的关注。
[1]李桢,黄劲松.基于RSSI抗差滤波的WIFI定位[J].武汉大学学报:信息科学版,2016,41(3):361-365.
[2]苏松,胡引翠,卢光耀,等.低功耗蓝牙手机终端室内定位方法[J].测绘通报,2015(12):81-84.
[3]徐守志,祁永华,徐波,等.基于能量的zigbee定位算法研究[J].华中科技大学学报:自然科学版,2013,41(增刊2):270-273.
[4]张令文,杨刚.超宽带室内定位关键技术[J].数据采集与处理,2013,28(6):706-713.
[5]姜志鹏,陈正宇,刘影,等.TOA定位算法非线性优化问题研究[J].传感技术学报,2015,28(11):1716-1718.
[6]朱国辉,冯大政,周延,等.一种线性校正到达时间差定位算法[J].电子与信息学报,2015,37(1):85-90.
[7]石雪军,纪志成.基于射频识别的室内定位系统算法研究[J].系统仿真学报,2015,27(6):1294-1230.
[8]谭志,张卉.无线传感器网络RSSI定位算法的研究与改进[J].北京邮电大学学报,2013,36(3):88-91.
[9]肖竹,王勇超,田斌,等.超宽带定位研究与应用:回顾和展望[J].电子学报,2011,39(1):133-141.
[10]赵大龙,白凤山,董思宇,等.一种基于卡尔曼和线性插值滤波的改进三角质心定位算法[J].传感技术学报,2015,28(7):1086-1090.
李园园(讲师),研究方向为嵌入式系统、移动应用技术等;李勇(工程师),研究方向为图像处理、嵌入式系统应用。
High-precision Positioning System Based on Ultra-wide Band Communication
Li Yuanyuan,Li Yong
(Zhongshan Polytechnic,Zhongshan 528404,China)
Aiming at the limitation of the localization accuracy of several kinds of indoor positioning technology,a position system based on STM32F103RBT6 and DW1000 is proposed.The software and hardware are designed,and the location algorithm is discussed.The distance between the tag and the anchor is measured through the bidirectional TDOA algorithm,and which is aggregated to the location server by UWB communication,then the 3D space coordinates of tag are calculated by the triangle centroid algorithm.The experiment results show that the system has high precision both in LOS and NLOS environments.
indoor positioning;UWB;TDOA;triangle centroid algorithm
TN98
A
��薛士然
2016-03-14)