一种基于车辆运动状态估计的商用车侧翻预警方法
2016-11-10刘文营
刘 伟,刘文营,刘 威,张 琨
Liu Wei1,Liu Wenying2,Liu Wei3,Zhang Kun4
(1. 东软集团股份有限公司,辽宁 沈阳 110179;2. 中国汽车技术研究中心,天津 300300;3. 东北大学,辽宁 沈阳 110179;4. 华晨汽车集团,辽宁 沈阳 110179)
一种基于车辆运动状态估计的商用车侧翻预警方法
刘 伟1,刘文营2,刘 威3,张 琨4
Liu Wei1,Liu Wenying2,Liu Wei3,Zhang Kun4
(1. 东软集团股份有限公司,辽宁 沈阳 110179;2. 中国汽车技术研究中心,天津 300300;3. 东北大学,辽宁 沈阳 110179;4. 华晨汽车集团,辽宁 沈阳 110179)
以商用车侧翻预警系统的开发为目标,提供一种实用的侧翻预警方法,提高车辆安全性。分析具备应用条件的车辆传感器,通过侧翻特性和侧翻相关车辆状态响应特性的分析,提出基于车速和转向的侧向运动状态估计方法,并设计基于转向盘转角和侧向加速度的侧翻预警融合算法,用于侧翻预警系统开发。
车辆动力学;侧翻预警;状态估计
0 引 言1
侧翻是一种高发且很危险的交通事故,与其他形式的交通事故相比具有更高的伤亡率。美国高速公路交通安全局数据统计报告中侧翻造成的死亡人数增长显著高于碰撞,另外在乘用车侧翻事故减少的同时,商用车致命侧翻事故却大幅增加[1]。从事故影响因素中的车辆控制系统设计角度出发,研究商用车动态侧翻过程中的非绊倒侧翻[2]机理,确定侧翻预警机制,开发预警控制逻辑,有效提醒驾驶员纠正操纵动作避免侧翻发生,最后通过实车试验数据分析侧翻预警方法的效果。
1 车辆侧倾状态测量传感器
1.1 传感器概述与分析
在侧翻预警系统研究与应用方面,需要利用车辆现有传感器,对车辆侧翻趋势进行判断。目前车辆中用于侧倾状态相关信号测量的传感器包括:侧向加速度传感器、横摆角速度传感器、悬架高度传感器、轮荷传感器、车速传感器、转向盘转角传感器[3],如图1所示。
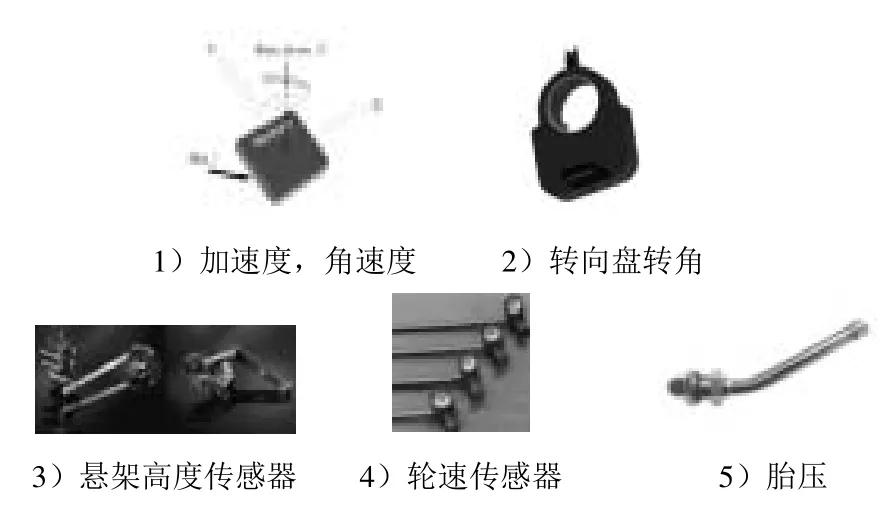
图1 车辆传感器应用现状
1.2 传感器测量特性分析
分析转向盘最大转角为75°、车速80 km/h的角阶跃试验,如图 2所示。在试验记录的状态信号中,转向盘转角 δ信号直接反映了驾驶员的驾驶意图,横摆角速度r信号响应最快、侧倾角φ信号响应较快、侧向加速度ay信号质量较差且响应较慢。
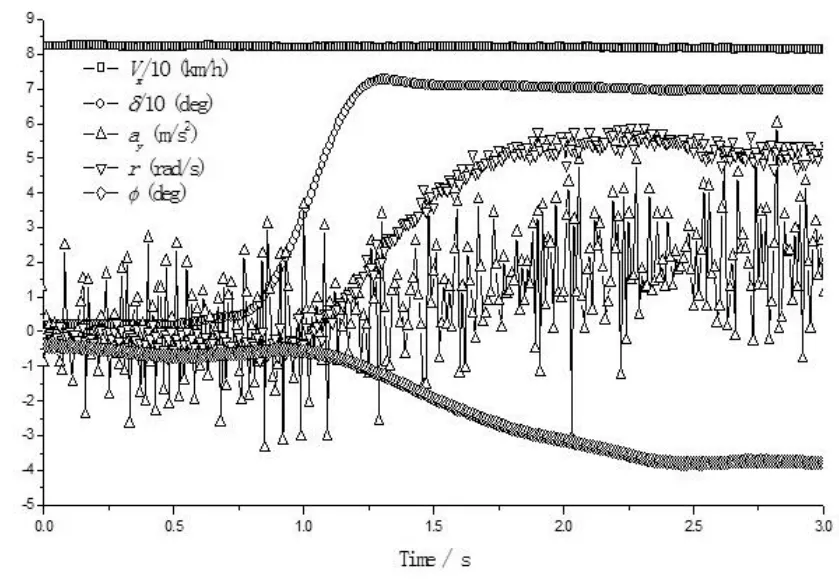
图2 75°角阶跃试验车辆状态响应特性
分析车辆状态参数响应特性,通过侧翻试验数据对车速、转向盘转角、侧向加速度、横摆角速度和侧倾角的响应特性进行比较分析,选择转向盘转角、侧向加速度作为侧翻预警算法的主要信息。
2 车辆侧翻机理的分析
2.1 带悬架汽车的准静态侧翻
带悬架汽车的各变量定义及准静态侧翻分析如图 3所示,侧向加速度产生的侧倾是车身绕悬架导向构成的侧倾中心转动形成的,因此需要考虑悬架对侧翻过程的影响,忽略簧下质量,根据达朗贝尔原理有

由于悬架的弹性和阻尼特性,在侧倾角φ与侧向加速度的关系中,引入侧倾率Rφ

带悬架汽车在侧倾过程中,质心位置发生了偏移,使得侧翻阈值减小。根据经验悬架和轮胎弹性的影响分别会带来5%侧翻阈值的减小,将汽车准静态侧翻过程中的侧翻阈值修正为

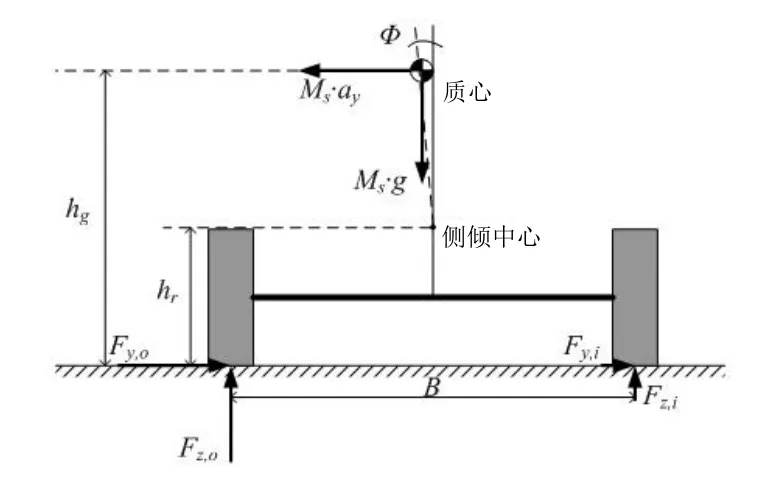
图3 带悬架汽车的准静态侧翻分析
与独立悬架相比,刚性车轴侧倾中心较高,重心到侧倾中心的距离短,载荷转移的影响较小;侧倾率较小、重心较低的车辆受这种效应影响也较小[4]。
2.2 汽车的瞬态侧翻
汽车的瞬态侧翻阈值小于准静态侧翻阈值,根据试验数据的统计,车辆的侧翻阈值与准静态侧翻过程中的侧翻阈值相比,轿车约低 30%,货车、客车等商用车低50%[5]。结合式(3)准静态侧翻阈值的计算方法和瞬态侧翻的统计规律,确定用于侧翻预警算法的商用车侧翻阈值为

3 侧向加速度估计算法
在车辆运动的线性区,用圆周运动的特性表示车辆在转向过程中的运动状态,可以得到转向盘转角、车速和侧向加速度之间的关系

使用蛇形试验数据对该算法进行验证,对侧向加速度估计算法进行验证,如图 4所示。通过分析验证结果,应用转向盘转角和车速能够预测加速度可能的变化趋势。在非线性区,这种估计方法会比较保守,可以用于预警系统的开发,并通过与加速度测量值的融合来修正不必要的预警。

图4 蛇形试验侧向加速度估计算法验证
4 侧翻预警控制逻辑
4.1 基于侧向加速度的侧翻预警控制逻辑
侧向加速度的预警控制逻辑基于TTR(Time to Rollover)[6],触发预警的信号是产生侧翻力的根源,因此对于侧翻状态的指示更加直接。同时此方法还结合了道路倾角、侧向风带来的侧向加速度影响。通过侧翻动力学理论分析获取的车辆侧翻阈值计算方法,根据车辆的静态质量、尺寸参数计算得到侧翻阈值[7]。
4.2 基于转向盘转角的侧翻预警控制逻辑
用相图的方式表示蛇形试验中侧向加速度的实际值和估计值,相图中出现的迟滞表示估计值超前,如图 5所示。预警信号的解除可以通过放缓转向盘输入和降低车速实现,对于预警系统而言具备可行性。

图5 侧向加速度估计值相图分析
采用基于转向盘转角的侧翻预警控制逻辑是因为触发信号的出发点是驾驶员的直接操纵,使用前文中的瞬态侧翻阈值计算方法和侧向加速度估计方法获得侧翻阈值和估计的侧向加速度值,通过两者比较来确定一级预警信号的发出,根据转向盘转角持续变化的趋势(结合转向盘转角和角速度)确定二级预警信号的动态触发门限值。预警的解除也可以通过转向操纵的纠正迅速完成。
5 侧翻预警控制逻辑的试验验证
5.1 独立的侧翻预警控制逻辑试验分析
分别对基于转向盘转角和侧向加速度的侧翻预警控制逻辑进行测试,在不同车速下进行换道操纵,测试控制逻辑的响应情况。测试结果如图6所示,其中预警方式 1给出基于转向盘转角的侧翻预警控制逻辑效果,预警方式 2给出基于侧向加速度的侧翻预警控制逻辑效果。
根据惯导测得的车辆侧倾角对 2种预警的有效性进行客观分析(如图7所示),基于侧向加速度的侧翻预警控制逻辑能够更好地跟随大侧倾角的产生发出不同级别的预警信号。
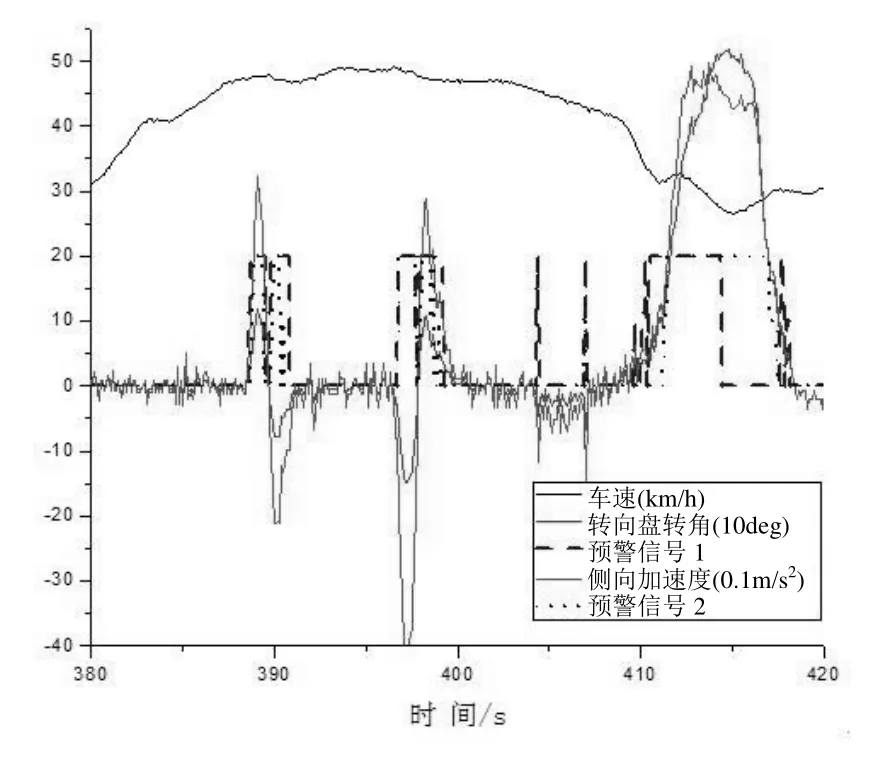
图6 2种预警方式在换道试验中的效果对比

图7 2种预警的有效性分析
5.2 侧翻预警控制逻辑的融合
基于转向盘转角的预警通过直接操纵产生并解除,有一定的超前性,也会产生一定程度的误报。基于侧向加速度的预警通过侧向力的影响因素产生并解除,考虑了环境条件(道路坡度、侧向风等)的影响,在对侧倾状态的指示方面更加直接,但是相比基于转向盘转角的方式会有延迟,而且解除过程也会存在一定的延迟,从而影响驾驶习惯的培养。
根据对比分析,提出综合应用基于转向盘转
角和侧向加速度 2种方法的预警控制逻辑,目的在于保证预警的有效性以利于培养良好的驾驶习惯,同时保证预警产生的合理性利于预警信号在发生和解除过程中能够反映合理驾驶。在一级预警中采用阈的方式,在二级预警中采用侧向加速度优先的原则,最终确定的融合方式见表2。
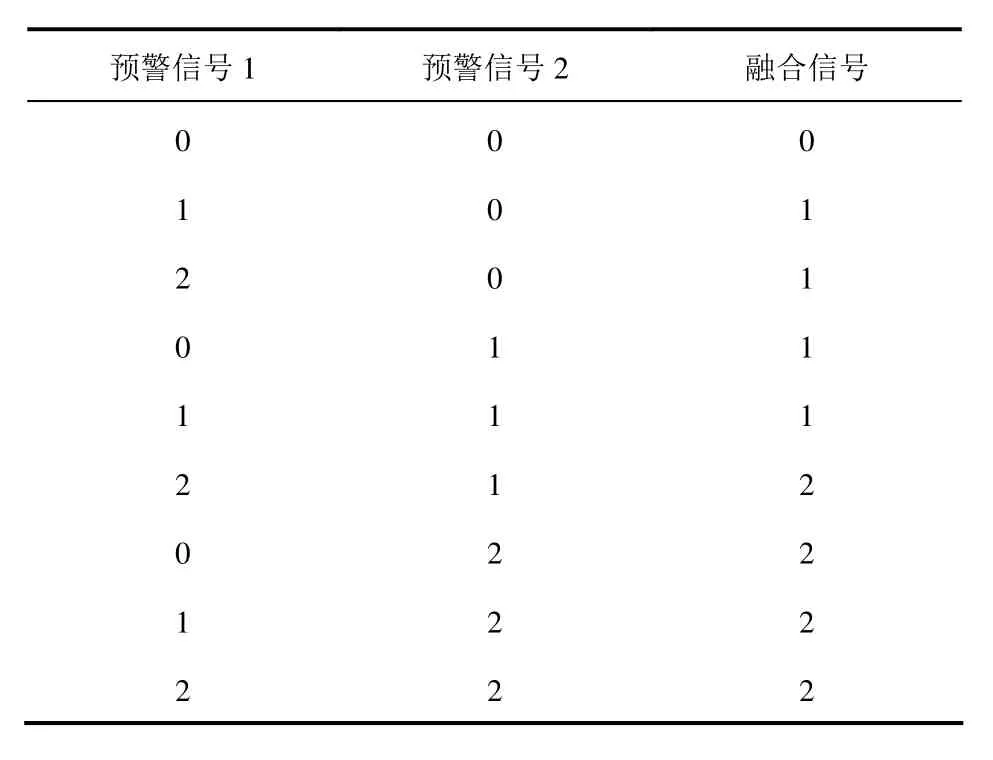
表2 基于转向盘转角与侧向加速度融合的侧翻预警控制信号
6 总 结
分析了车载侧倾状态相关传感器的应用现状,开展了侧翻阈值计算方法和侧翻机理的研究,选择直接影响侧倾状态和导致侧翻发生的状态信号,开展侧向加速度估计方法的研究;在传统TTR预警方法的基础上,融合基于转向盘转角的侧倾预警算法,通过实车测试,确定侧翻预警系统的融合算法。通过有效预警的产生和合理操纵动作对预警的解除,减少对驾驶员的干扰和培养良好驾驶习惯,从而有效降低侧翻发生风险。
[1]金智林,翁建生,胡海岩. 汽车侧翻预警及防侧翻控制[J]. 动力学与控制学报,2007,5(4):365-369.
[2]Elsasser D, Barickman F, Albrecht H, et al. Test Track Lateral Stability Performance of Motorcoaches Equipped With Electronic Stability Control Systems [J]. Accident Reconstruction Journal, 2014, 24.
[3]刘伟,丁海涛,郭孔辉,等. 质心侧偏角相图在车辆ESC系统稳定性控制的应用[J]. 北京理工大学学报,2013,33(1):42-46.
[4]罗文发,吴光强,郑松林. 商用车电子稳定性控制系统的标准发展及关键技术[J]. 汽车技术,2012(04):6-12.
[5]余志生. 汽车理论第5版 [M]. 北京:机械工业出版社,2009:194-195.
[6]Andreas R. Schumann,Ronald J. Anderson. Rollover Prevention for Heavy Utility Vehicles Using Active Lateral Suspension Control[C]. AVEC’, 2002.
[7]陈启鹏,熊巧巧,周成. 汽车侧翻预警报警装置的研究[J]. 机械与电子,2012(11):64-66.
U461.6
A
10.14175/j.issn.1002-4581.2016.05.003
1002-4581(2016)05-0008-03
国家重点研发计划项目(JFYS2016ZY02001610)。
2016-05-12
