基于加速度传感器的下肢康复机器人示教训练*
2016-11-08赵小磊林木松史小华赵朝盛王洪波
赵小磊,林木松,李 齐,史小华,赵朝盛,王洪波*
(1.河南省食品药品审评查验中心,郑州450004;2.燕山大学河北省并联机器人与机电系统实验室,河北秦皇岛066004)
基于加速度传感器的下肢康复机器人示教训练*
赵小磊1,林木松2,李齐2,史小华2,赵朝盛2,王洪波2*
(1.河南省食品药品审评查验中心,郑州450004;2.燕山大学河北省并联机器人与机电系统实验室,河北秦皇岛066004)
将康复治疗人员的临床治疗经验与康复机器人的训练结合,能够有效提高已有下肢康复机器人的训练性能,为此提出一种基于加速度传感器的示教训练方法及无线数据采集系统。通过已有的外骨骼式下肢康复机器人,分析并推导出关节角度与末端轨迹的关系及关节加速度与关节角度的关系。通过加速度信息分析出轨迹信息从而控制训练轨迹。研发的无线数据采集系统提取康复师训练时患者下肢加速度信息并转化成轨迹信息,进而被用于康复机器人示教训练控制。实验结果证明,该系统能够满足康复机器人的示教训练要求。
机械电子工程;加速度传感器;机器人的示教与训练;下肢康复机器人;无线数据采集系统
EEACC:6140M doi:10.3969/j.issn.1004-1699.2016.10.021
最新的统计数据显示,全国肢体残疾者约2 407万人。2015年我国60岁以上老年人数量已超过2亿,日趋严重的高龄化社会将会增加大量肢体残障者。如何运用现代先进康复治疗技术,改善患者肢体运动功能,使患者在最短时间内达到最满意的治疗效果并最终摆脱病残的折磨,是我国面临的一个日趋严重的难题,同样一直是康复工作者研究和实践的重点[1-2]。然而,我国康复事业的现状是:肢体残障患者人数众多,康复医师缺口较大[3],高端康复医疗设备严重短缺,特别是技术含量较高的智能康复设备[4-5]。传统的人工康复治疗方法效率低、重复性差,但仍是有效的训练方法。康复机器人作为一种自动化的康复治疗设备,可以帮助患者进行科学有效的康复训练,使患者的运动功能得到更好的恢复[6]。现行康复机器人虽然在稳定性和重复性方面具有明显的优势[7],但提供的训练方法比较单一,训练方法多为内置预定的运动轨迹,医师无法很好的融入到机器的治疗过程中,不能针对不同病情进行相应的训练方案的改进。
机器人示教训练技术,即机器人示教再现技术,它是一种特殊的程序编制及功能实现过程。其实现过程一般可以分为示教和再现两部分,首先采用一定方法让机器人达到规定的位姿,并记录各关节运动信息,然后结合这些信息通过某种控制算法控制机器人运动,重现记录的运动过程[8]。在机器人领域不乏示教技术的应用,诸如Dana Kulic和Kieu等人在人体动作捕捉技术示教方面的研究[9-10]。而将示教训练应用于康复机器人的训练,能够将康复医师的临床经验与康复机器人的康复训练相结合,针对不同病人提供相应的科学、最优的康复训练计划,可以显著改善康复机器人的治疗效果。日本的Yoshifumi等人在近些年研发了一系列带有示教功能的上肢康复机器人,其功能基于阻抗控制、数据预处理等原理,可以制定适合不同病患个体的运动轨迹及训练方案,有效地提高了治疗效果[11-13]。河北工业大学的孙建广等人研发了一款三自由度的踝关节康复并联机器人,其通过位置记忆可以实现踝关节康复训练的示教与再现[14]。河南科技大学的陈天聪等人将Joystick作为示教工具与下肢康复机器人技术结合,治疗医师可根据患者的具体病情,通过摇杆对机器人进行示教,操作简单方便[15]。
专家医师的徒手治疗信息是作为康复机器人示教信息的最优选择,然而上述示教方法在示教信息采集时需要借助机器人本身,无法脱离机械直接的采集医师的治疗信息,故此产生了研发一种结合传感技术的外置采集设备的设想。传感技术与机器人技术的结合,不乏先例。其中西北工业大学的刘歌群等人曾将磁航向传感器应用在机器人定位上,该方案具有很高的性价比[16]。郑州大学的陈辉等人将传感技术应用在轮式机器人控制方面,该系统运动控制性能稳定,能够在测试环境下实现运动路径的准确控制[17]。经过讨论与学习,最终提出一种基于加速度传感器的下肢康复机器人的示教训练方法。其基本原理是:将外置加速度传感器固定在患者下肢各关节的特定位置,康复医师对患者进行治疗的过程中,数据采集系统提取患者下肢的运动加速度数据并生成运动轨迹,然后转换成相应的控制信息,控制下肢康复机器人按照上述康复治疗过程对患者进行重复训练。
1 机械平台
本研究是基于课题组现有的外骨骼式下肢康复机器人系统平台,如图1所示。
该外骨骼式下肢康复机器人的由左机械腿、右机械腿、可移动座椅、控制箱和触摸显示屏五部分组成。机械腿左右对称,设计采用了拟人化的三自由度关节型结构,由踝关节、膝关节和髋关节三部分组成,各关节均为一个自由度。机械腿内置的长度调节机构可实现大小腿长度调节,且整机两腿之间的宽度可调,可以适应不同身高体型的患者。各关节由直流电机与传动驱动链驱动。各关节的回转运动组合实现各连杆的运动,最后使机械腿的末端完成特定的运动轨迹。可移动座椅可以和机器人主体分离,方便病患的搬移。该康复机器人拥有主动训练模态、被动训练模态等多种训练模态[18]。

图1 外骨骼式下肢康复机器人
2 无线数据采集系统设计
基于三轴加速度传感器设计了人体下肢加速度信息采集系统。该系统由上位机、数据采集主系统和数据采集分系统组成。采用星状点对多点通信系统结构模式,数据采集主系统与每一台数据采集分系统都通过无线数据传输模块以双向通信的方式进行数据传送。无线数据采集系统结构框图如图2所示。

图2 无线数据采集系统结构框图
2.1无线数据采集系统硬件设计
数据采集主系统包括控制单元、NRF24L01无线数据传输模块、串口通信模块和电源模块4部分,如图3所示。其功能主要是接收并解析上位机发送的串口控制指令,与接收无线数据分系统通信获取加速度数据并发送给上位机。

图3 数据采集主系统实物图
数据采集分系统包括控制单元、NRF24L01无线数据传输模块、ADXL345加速度计模块和电源模块四部分,如图4所示。选用的加速度传感器是ADI公司采用MEMS技术开发的数字式三轴加速度计ADXL345,其功能主要是通过ADXL345加速度计模块采集当前加速度值,并发送给采集主系统。

图4 数据采集分系统实物图
使用时加速度传感器固定在使用者下肢的大腿和小腿的特定位置,如图5所示。ADXL345芯片以O-xy平面竖直进行布置,其中,x轴沿大腿、小腿轴线方向。

图5 测量装置使用方法
2.2上位机软件设计
无线数据采集系统上位机软件是基于NI(National Instrument)公司的 LabVIEW软件编写的。主要由加速度信号分时采集、数据处理、轨迹生成以及其他附加功能等几部分组成。软件流程图如图6所示。

图6 无线数据采集系统上位机软件流程图
上位机软件的用户界面包括参数设置、控制按钮、角度显示、姿态显示和末端轨迹显示等五部分内容。如图7所示,为调试时的数据参数,可以清楚直观的显示出运动的姿态、轨迹图及角度等信息。

图7 上位机软件用户界面
3 示教轨迹算法
基于加速度传感器获取人体下肢运动轨迹,需要通过一定方法建立人体下肢运动的加速度与运动轨迹的对应关系。通过确定各关节的尺寸参数和角度信息,即可得到肢体的位姿,而运动轨迹就是下肢位姿序列,只需再确定关节角度与加速度之间的关系即可推导出加速度与运动轨迹的关系。所以示教轨迹算法的基本内容是确定关节角度与末端运动轨迹的关系和关节加速度与角度的关系。
3.1关节角度与末端运动轨迹的关系
末端轨迹主要是大腿和小腿部分运动的结果,因此将下肢模型简化为二连杆机构。建立其简化模型如图8所示。

图8 人体下肢简化的二连杆模型
图8中OA表示大腿部分,即连杆1,AB表示小腿部分,即连杆2。L1、L2分别是人体下肢大腿、小腿的长度,O、A、B表示髋关节、膝关节和踝关节,C、D为传感器安装位置。O-x0y0为基坐标系,O-x1y1、A-x2y2分别与连杆1、连杆2固连,B-x3y3固定在连杆2的末端。θi为Li-1绕zi轴转到Li的转角,规定逆时针为正、顺时针为负。
B点相对基坐标系的位置坐标(xB,yB)为:

末端运动轨迹即为B点相对基坐标系的位置坐标序列。
3.2关节加速度与角度的关系
将人体下肢在矢状面内等效成平面2R串联机构,采用递推的牛顿-欧拉递推动力学方程对各连杆的速度和加速度进行推导。该方法的特点是在连杆坐标系中描述自身的运动,而连杆运动一般是用连杆坐标系原点的速度和加速度,以及连杆坐标系的角速度和角加速度来描述的[19]。
用vi和ωi分别表示连杆坐标系{i}相对于基坐标系{0}的线速度和角速度,ivi和iωi表示vi和ωi在坐标系{i}中的线速度和角速度,i+1vi+1和i+1ωi+1是在坐标系{i+1}中的线速度和角速度,是在坐标系{i}中的线加速度和角加速度,和是在坐标系{i+1}中的线加速度和角加速度。
角速度和线速度传递公式可以表示为:

角加速度和线加速度传递公式可以表示为:

3.2.1单关节单杆模型
首先对大腿传感器位置进行速度和加速度推导,以髋关节作为支点,运动可以看成是刚体围绕支点转动的平面运动。
通过上述式(2)、式(3)求出加速器安装位置点C相对于基坐标系{0}表示的线加速度
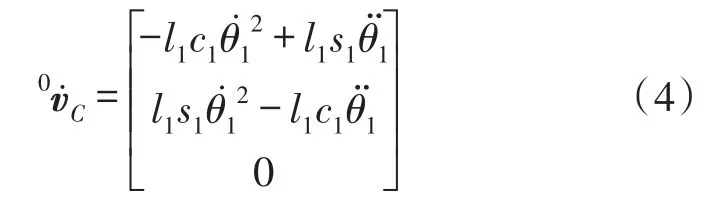
由加速度传感器采集到的加速度信号可知:

代入式(4)中,得到关于θ1的二阶微分方程组

式中ax为加速度计自身x轴的测量值,ay为加速度计自身y轴的测量值,g为重力加速度,l1对应于连杆1上加速度传感器安装的位置。
3.2.2双关节二连杆模型
采用相同的方法求出小腿传感器安装位置D相对于基坐标系{0}表示的线加速度

由加速度传感器采集到的加速度信号可知:
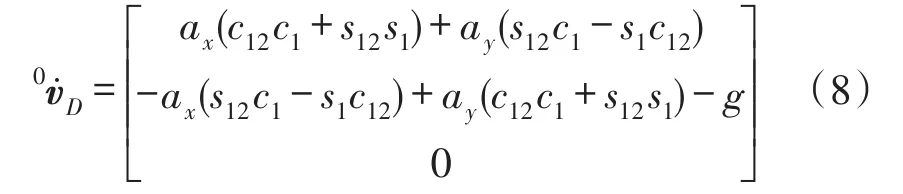
代入式(7)中,得到关于θ2二阶微分方程组方程组
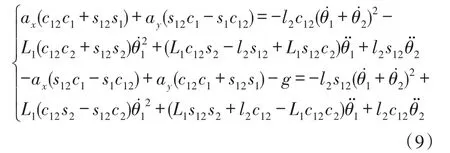
式中ax为加速度计自身x轴的测量值,ay为加速度计自身y轴的测量值,g为重力加速度;L1是连杆1长度,l2对应于连杆2上加速度传感器安装的位置,θ1为连杆1关节角度。
这样便确定了加速度与关节角度的关系,进而即可求解人体下肢运动轨迹。
4 试验及其结果分析
实验者大腿长度400 mm,小腿长度420 mm,即为所述L1与L2;加速度安装位置分别为200 mm和210 mm,即为所述l1与l2。图9为下肢康复机器人示教训练实验流程图。

图9 下肢康复机器人示教训练实验流程图
具体下肢康复机器人示教训练的实验过程如下。
①实验者下肢佩戴无线数据采集模块,在他人帮助下完成一定的运动。无线数据采集系统采集人体大腿和小腿的运动角度信息。如图10所示,获得图10(a)和图10(b)所示的实验者下肢运动角度曲线,运动数据经过平滑处理后用于机器人示教。
②将采集的人体下肢运动信息用于康复机器人的示教,控制康复机器人进行康复训练,并利用康复机器人自身的绝对位置编码器,获取机械腿运动过程中大腿和小腿的角度信息。如图11所示,获得的机器人训练运动角度曲线如图11(a)和图11(b)。可以发现,机器人训练角度曲线与实验者下肢运动角度曲线基本相符,且平滑度高。
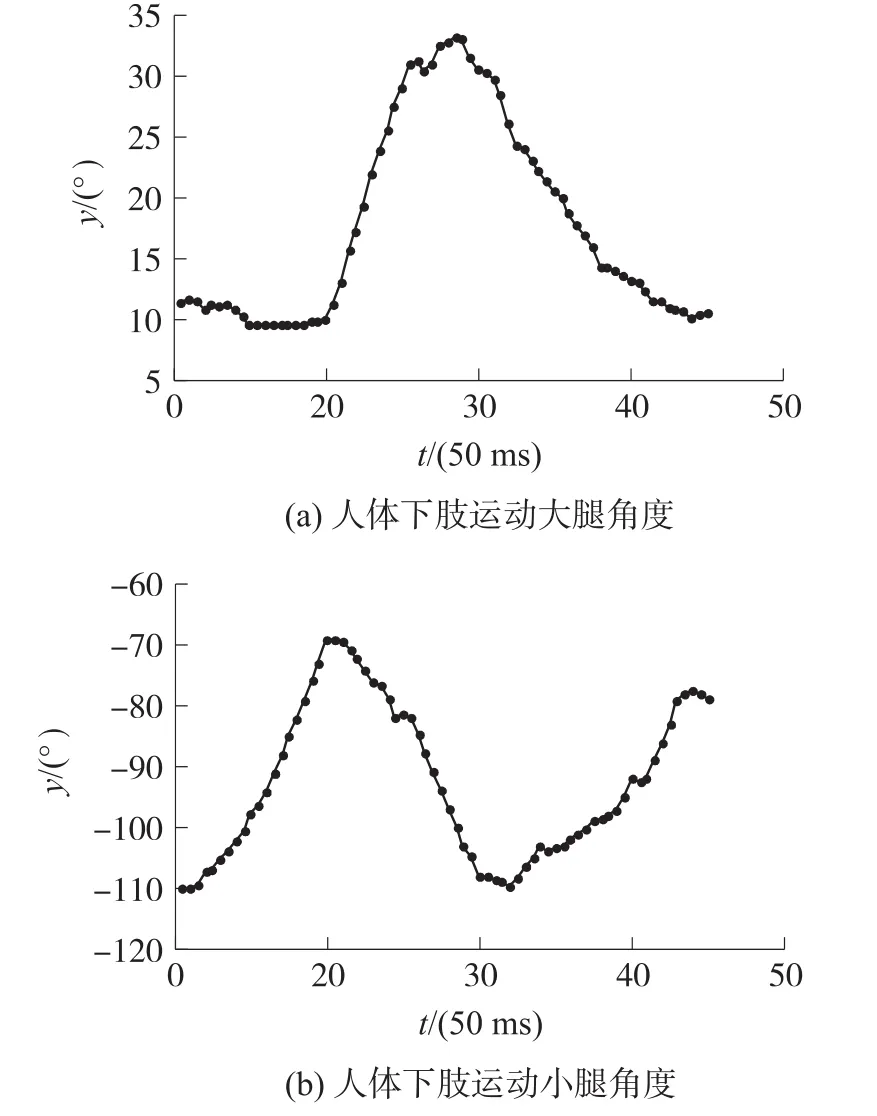
图10 人体下肢运动角度采集结果

图11 康复机器人运动角度采集结果
③根据人体下肢和康复机器人的运动角度信息生成各自的运动轨迹,并进行比较,分析该无线数据采集系统用于下肢康复机器人示教训练的可行性。最后生成的人体下肢与康复机器人运动轨迹如图12所示。

图12 人体下肢与康复机器人运动轨迹比较
由图12可知,人体下肢运动轨迹与康复机器人训练轨迹在部分采样点处,存在较大的位置误差,但是总体运动趋势相符,整体重合度较高。所以,在一定误差允许范围内,使用该无线数据采集系统进行下肢康复机器人示教训练是可行的。
5 结论
传统的人工康复与机器人康复训练各有利弊,只有将康复治疗人员的临床经验与康复机器人的康复训练相结合,才能提供高效、稳定、重复性好的训练方法。提出了一种基于加速度传感器的人体下肢运动信息采集方法以及相关的无线数据采集系统。确定了关节角度与末端轨迹的关系及关节加速度与关节角度的关系。设计一套无线数据采集系统,主要包括硬件搭建及其上位机相关软件的设计。经过测试,该系统能够用于下肢康复机器人的示教训练。
[1]Colombo G,Matthias J,Reinhard S,et al.Treadmill Training of Paraplegic Patients Using a Robotic Orthosis[J].Rehabilitation Res Develop,2000,37(6):693-700.
[2]Veneman J F,Kruidhof R,Hekman E E G,et al.Design and Evaluation of the LOPES Exoskeleton Robot for Interactive Gait Rehabilitation[J].IEEE Trans Neural Syst Rehabil Engng,2007,15(3):379-386.
[3]黄海灵,吴洪涛,陈柏.基于柔索驱动的踝关节康复机器人的研究[J].中国制造业信息化,2012,41(3):27-29.
[4]Zhu Y,Zhen R,Liu H,et al.The Research of Rehabilitation Robots BCI Technology Based on EEG[M].Wuhan:People’s Republic of China,12-14 December,2008:1107-1110.
[5]Krebs H,Dipietro L,Levy-Tzedek S,et al.A Paradigm Shift for Rehabilitation Robotics[J].Engineering in Medicine and Biology Magazine,2008,27(4):61-70.
[6]Tejima N.Rehabilitation Robotics:A Review Advanced Robotics[J].,2000,14(7):551-564.
[7]Hillman M.Rehabilitation Robotics from Past to Present:A Historical Perspective[J].Advances in Rehabilitation Robotics,2004,306:25-44.
[8]龚建伟,高峻尧,熊光明.基于航向示教再现的履带式移动机器人路径跟踪[J].兵工学报,2003,24(1):102-105.
[9]Dana K,Christian O,Dongheui L,et al.Incremental Learning of Full Body Motion Primitives and Their Sequencing Through Human Motion Observation[J].The International Journal of Robotics Research,2011,31(3):330-345.
[10]Kieu T C,Yamazaki K,Hanai R,et al.Grasp Observation and Reproduction by Humanoid Robots Using Color Camera and 3D Sensor[J].2011 IEEE/SICE International Symposium on System Integration(SII),2011:808-813.
[11]Yoshifumi M,Masaya N,Hiroyuki U,et al.Development of Rehabilitation Training Support System of Upper Limb Motor Function for Personalized Rehabilitation[C]//International Coference on Robotics and Biomimetics,2008:300-305.
[12]Yoshifumi M,Akinori H,Takashi U,et al.Development of Rehabilitation Training Support System Using 3D Force Display Robot[M].Robot Motion Control,2007:303-310.
[13]Yuichi F,Masaya N,Toshimasa A,et al.Development of Rehabilitation Support Robot for Personalized Rehabilitation of Upper Limbs[C]//International Conference on Rehabilitation Robotics,2009:787-792.
[14]Sun J G,Gao J Y,Zhang J H,et al.Teaching and Playback Control System for Parallel Robot for Ankle Joint Rehabilitation[C]//International Conference on Industrial Engineering and Engineering Management,2007:871-875.
[15]陈天聪,韩建海,王会良.基于Joystick的卧式下肢康复训练机器人示教再现功能分析[J].技术应用,2014,2:22-25.
[15]刘歌群,刘卫国,马动涛.磁航向传感器在机器人定向中的应用[J].传感技术学报,2004,17(2):224-227.
[15]陈辉,邓记才,吴晓辉.多传感器信息融合在轮式机器人运动控制中的应用[J].传感技术学报,2011,24(6):951-918.
[18]Deng Fuhai.Design and Research of the Mechanical System for A Multi-Joint Lower Limb Rehabilitation Robot[D].Qinhuangdao:Master’s dissertation in Mechanical and Electronic Engineering Yanshan University,2014:39-41.
[19]Xiong Youlun.Robot Technology Foundation[M].Wuhan:Huazhong University of Science and Technology,2010:72-77.

赵小磊(1965-),女,河南郑州人,河南省食品药品审评查验中心高级工程师,主要研究方向为医疗器械技术,18638775977@126.com;

王洪波(1956-),男,河北邢台人,国家千人计划特聘专家,燕山大学机械工程学院教授,博士生导师,主要研究方向为机器人学与康复医疗机器人,hongbo_w@ ysu.edu.cn。
Teaching and Training of the Lower Limb Rehabilitation Robot Based on Accelerometer*
ZHAO Xiaolei1,LIN Musong2,LI Qi2,SHI Xiaohua2,ZHAO Chaosheng2,WANG Hongbo2*
(1.Center for Food and Drug Evaluation and Certification of Henan Province,Zhengzhou 450004,China;2.Parallel Robot and Mechatronic System Laboratory of Hebei Province,Yanshan University,Qinhuangdao Hebei 066004,China)
It can effectively improve the training performance of rehabilitation robot by combining the clinical experience of rehabilitation physician with rehabilitation robot training,and thus a teaching and training method based on the accelerometer and a wireless data acquisition system are proposed.Using the existing exoskeleton lower limb rehabilitation robot,the relationship between the joint angle and the end trajectory,and the relationship between the link acceleration and the joint angle are analyzed.The trajectory data is analyzed from the acceleration information,so the robot training trajectory can be controlled.Wireless data acquisition system developed collects the acceleration data when patient is trained by rehabilitation physician and transforms it into trajectory data,which can be used for the control of teaching and training.The experimental results demonstrate that the system can satisfy the teaching and training requirements of rehabilitation robot.
mechatronic engineering;accelerometer;robot teaching and training;lower limb rehabilitation robot;wireless data acquisition system
TH113
A
1004-1699(2016)10-1596-06
项目来源:教育部高等学校博士学科点专项科研基金项目(20131333110006)
2016-03-30修改日期:2016-05-16