图像处理在输电线路防外力破坏监控中的应用
2016-11-04张恕远
谭 越 张恕远
(西华大学机械工程学院,四川 成都 610039)
图像处理在输电线路防外力破坏监控中的应用
谭越张恕远
(西华大学机械工程学院,四川 成都610039)
针对工程机械在输电线路走廊内施工时可能会对输电线路造成外力破坏的问题,提出了一套基于电子稳相、连通域检测、形状特征提取的运动图像处理算法。该算法以多高斯建模方法提取的运动目标为基础,对输电线路走廊内出现的工程机械施工场景进行检测、识别和判断。试验证明,该图像处理算法能准确、可靠地提取正在运动的工程机械吊臂。
工程机械输电线路图像处理电子稳像连通域检测形状特征提取运动目标提取多高斯建模
ShapefeatureextractionExtractingmovingobjectMulti-Gaussianmodeling
0 引言
电力输送是我国电力工业中的重要环节之一。近年来,我国的电力需求不断增长,输电线路覆盖范围越来越广[1]。但输电线路走廊内时常存在违规施工和人为破坏电力设施的现象。虽然在线监测产品目前已经在输电线路上得到了广泛应用,图像和视频类产品占据了较大的比例,但大多视频类产品都只是停留在对远程视频的播放上,未实现对视频中有用信息的自动提取。
本文以运动目标提取为基础,提出一套基于电子稳像、连通域检测和形状特征提取的运动图像处理算法,从而对输电线路走廊内出现的工程机械施工场景进行检测、识别和判断。
1 运动目标检测算法
运动目标检测方法一般有帧间差分法和单高斯背景建模法两种。在运动目标检测算法中,帧间差分法的算法较简单,也较容易被理解[2]。但由于帧间差分法对光照变化敏感,会导致错误检测。场景中的运动物体速度一旦发生变化,帧间差分法也会出现错误检测。在视频图像序列中,每个像素点在时间轴上是服从离散随机分布的。单高斯建模就是将任意一个像素点在时间轴上的动态变化看作是服从单高斯分布的[3]。但现实场景往往复杂多变,如树叶的摇动、水面波纹、影音干扰等,都会造成单高斯建模检测的误检。
单高斯建模针对的是静态场景,对于动态场景,可将其看成多个单一静态场景的组合。如果一个像素点对应多个高斯分布,那么一般就把这样的建模方式叫作多高斯建模[4]。
多高斯建模中,每个高斯分布对应动态场景的一种状态,能够拟合复杂动态场景中的变化分布[5-7]。如果在一帧图像的一个像素点上建立了K个高斯背景的模型,这个像素点在时间点t出现的概率可以表示为:
(1)
式中:ωi,t为在t时刻第i个高斯分布的权重;μi,t-1和σi,t-1分别为在(t-1)时刻的第i个高斯分布的期望和方差。
1.1多高斯建模初始化
为了获得高斯分布的方差和期望,在建立多高斯背景模型时,需要对模型进行初始化。如果选取一段视频图像的N帧图像,在某一像素点上可以采集到N个像素值,从而计算出高斯函数的期望和方差:
(2)
(3)
式中:It为该像素点灰度值;μ0和σ2分别为期望和方差。
上述初始化需要将视频图像前的若干帧作为样本图像,建立多高斯背景模型。但通常情况下,需要实时检测运动目标,不允许有太长的等待时间。一般将第一帧图像的像素值作为第一个高斯背景模型分布的期望值,方差可以取较大的数值。剩余的高斯分布的期望通常取值为零,方差取较大的数值。因为第一个高斯分布的期望是实际图像的像素值,所以它的权重值一般比其他高斯分布的权重值大。采用这样的方式来初始化模型参数,可以迅速检测到运动目标,算法的实时性能够得到相应提高。
1.2多高斯建模背景匹配
建立背景模型后,就可以检测运动目标。通过对比当前图像中的像素点与背景模型中的像素点,可判断当前像素点是否能在建立的K个高斯模型中找到匹配的模型。如果在K个高斯模型中找到了匹配的模型,则该点可能为背景;如果没有找到匹配的模型,那么该点为前景。t时刻是否与背景模型匹配的判定公式如下:
|Xt-μi,t|≤Mσi
(4)
式中:Xt为当前图像中像素点的值;μi,t为对应像素点背景模型的均值;σi为对应模型的方差;M为匹配参数,一般取值2.5。为了判定与背景模型匹配的点是否为背景点,一般会把K个高斯模型按照ωi,t/σi,t值的大小顺序排序,然后判断该点是否为背景点。判断式如下:
(5)
式中:T为一个阈值,取值一般为0.89;β为排序后的高斯模型的权重求和值小于T时,j的最小值。式(5)的实质含义是:将高斯模型从大到小排序后,对高斯模型的权重进行相加,且相加值需大于T。因此,需要几个高斯模型。 如果满足条件的高斯模型在这前几个高斯模型中,那么可以判定该像素点为背景;否则,判定它为前景。
1.3多高斯建模背景模型更新
多高斯建模的方式是对一个像素建立多个模型,而且实时更新每个模型,使其可以在动态场景中检测运动目标。多高斯背景建模需要更新的参数主要是期望、方差、权重[8]。在建立的K个高斯模型中,如果当前像素能够与其中的某一个模型相匹配,那就需要更新这个对应的模型的参数。其实质就是将这个像素加入到该模型中。更新方式如下:
ωi,t=(1-α)ωi,t-1+α
(6)
μi,t=(1-ρ)μi,t-1+ρIt
(7)
(8)
式中:α为背景更新学习速度,取值在0~1之间;ρ为模型的参数更新速率,一般ρ≈α/ωi,t,取值也在0~1之间。
采用多高斯背景模型进行运动目标提取时,除了更新模型外,在像素点与所有模型不匹配时,需要建立一个新的模型去替代K个模型中权重最小的模型。对于新建的模型,一般会将它的像素值作为模型的均值,方差取一个较大的值,权重取一个较小的值。
2 图像处理综合算法
通过图像处理方式识别工程机械在输电线走廊内的施工情况,需要用到较多的图像处理算法。综合算法中的很多算法都已成熟,本文简单介绍图像连通域检测和特征识别算法。
系统的图像处理流程如图1所示。

图1 算法流程图Fig.1 Flowchart of algorithm
2.1图像连通域检测
连通域通常指图像中具备相同像素值,而且位置相邻的前景像素点构成的图像区域。连通域检测是指将图像中所有连通区域找出,并作好标记[9]。
连通域检测采用两遍扫描法。第一遍扫描时赋予每个像素位置一个标记值。扫描过程中,同一个连通区域内的像素集合中可能会被赋予一个或多个不同的标记值,标记时需要记录它们之间的相等关系。第二遍扫描就是根据相等关系对连通域的像素赋值,最终找出所有的连通域。
2.2机械吊臂特征识别
对机械臂的特征识别主要采用形状匹配的方法。形状匹配在很多领域都会用到,例如文字识别、图像检索、医疗图像处理、目标识别等[10]。几乎所有工程机械的运动机构都有较平直的部分,通过霍夫直线检测一定能检测到多条接近平行的直线。工程机械臂是杆状的长条形状,所以紧密度低、偏心率大。通过以上几个特点,便能识别出工程机械的特征。
2.2.1霍夫变换
霍夫变换一般用极坐标系来表示一条直线,如式(9)所示。在极坐标系中,对于坐标为(x0,y0)的点,可以用公式来描述通过这一点的所有直线,如式(10)所示。
r=xcosθ+ysinθ
(9)
rθ=x0cosθ+y0sinθ
(10)
式(10)中,每一对极径rθ和极角θ都代表一条通过点(x0,y0)的直线。将图像中提取的一个连通域边缘的所有点,在以极角θ为横坐标、极径r为纵坐标的平面内标出,并以此绘制出曲线。如果曲线相交,那么这两个点通过同一条直线。图2是假设三个点通过同一条直线的θ-r坐标系。
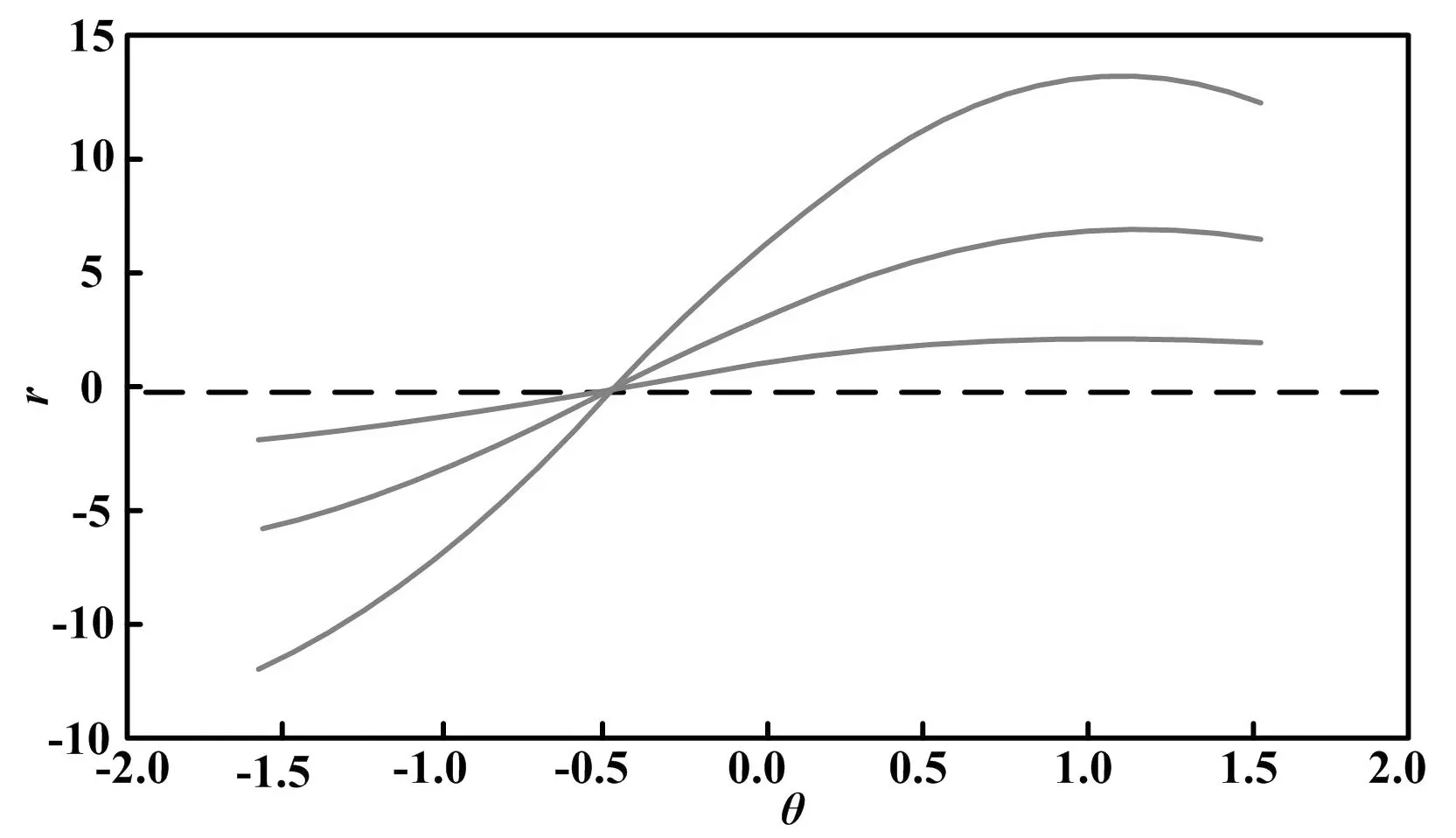
图2 θ-r坐标系Fig.2 θ-r coordinate system
根据以上分析可知,要寻找一条直线,可以根据图2所示的平面内相交于一点的曲线数量来衡量。相交于一点的曲线越多,那么这个交点所表示的直线就由更多的点组成。在实际使用中会选取一个阈值,如果相交于一点的直线超过这个阈值,就被认为是检测到了一条直线。
霍夫直线检测包括标准霍夫直线变换和统计概率霍夫直线变换。标准霍夫直线检测是追踪图像中每个点对应曲线间的交点,如果交于一点的曲线数量超过设定的阈值,那么可以认为这个交点所代表的参数对应原图像中的一条直线。通过统计概率霍夫直线变换,可以检测图像中的直线线段[11]。
2.2.2紧密度和偏心率
紧密度属于形状上的一种特征,由物体形状的周长和面积的关系来确定。其定义如下:
(11)
式中:S为周长;A为面积。
由式(11)可计算出:圆的紧密度为1,正方形的紧密度为π/4。几个形状之间的紧密度关系为:圆>正方形>长方形>多边形。
检测的工程机械吊臂,都是比较长的杆状,所以它们的紧密度一般不会太高。如果一个形状的紧密度比正方形紧密度大,那么可以排除其为工程机械臂。
偏心率计算公式如下:
(12)
式中:M20、M02、M11为中心距;A为连通域面积。
由于吊臂属于狭长结构,而且一般比较平直,所以偏心率一般较大。
3 试验与分析
通过Matlab和VisualStudio2010,对算法进行仿真试验。该算法能正确识别出正在运动中的工程机械吊臂。与其他运动目标提取方式相比,多高斯背景模型能够很好地处理树叶摇动等干扰因素,使提取出的运动目标不受背景的干扰,提取出的前景目标区域也很完整。
4 结束语
为了防止输电线路走廊内的工程机械对输电线路造成破坏,以多高斯建模提取运动目标为基础,设计了一套图像处理算法,并对算法进行仿真试验。该算法能有效识别和判断正在运动的机械吊臂,现已运用在四川某通信公司“输电线路防外力破坏智能监控系统开发”项目中。后续还需改进算法,以实现对其他可能会破坏输电线路的工程机械的识别。
[1] 卓高智.输电线路防外力破坏的原因以措施分析[J].中国高新技术企业,2012(1):131-133.
[2] 邬大鹏,程卫平,于盛林.基于帧间差分和运动估计的Camshift目标跟踪算法[J].光电工程,2010,37(1):55-60.
[3] 王龙,动态场景建模与运动目标检测方法研究[D].成都:电子科技大学,2014.
[4] 陆彬,王敏.单高斯与混合高斯相结合的运动目标检测[J].计算机与数字工程.2014(5):791-795.[5] 张运楚,宋世军,张汝敏,等.高斯混合背景模型的适应能力研究[J].计算机应用,2011,31(3):706-710.
[6] 李明,赵勋杰.改进的基于高斯混合模型的运动目标检测算法[J].计算机工程与应用,2011,47(8):204-206.
[7] 任克强,张盼华,谢斌.自适应学习的混合高斯模型运动目标检测算法[J].计算机工程与设计 2014,35(3):968-974.
[8] 傅昌宁.基于高斯混合模型的图像序列运动目标检测技术研究[D].武汉:武汉理工大学,2009.
[9] 赵爱群.视频文本提取算法[D].保定:河北大学,2010.
[10]周瑜,刘俊涛,白翔.形状匹配方法研究与展望[J].自动化学报,2012,38(6):889-910.
[11]胡彬.赵春霞,基于概率霍夫变换的快速车道线检测方法[J].微电子学与计算机,2011,28(10):177-180.
ApplicationofImageProcessinginMonitoringofPowerTransmissionLinetoAgainstExternalDamage
Inviewoftheproblemthattheconstructionofengineeringmachineryinpathofpowertransmissionlinemaycauseexternalforcedamageontransmissionline,amotionimageprocessingalgorithmsbasedonelectronicphasestability,connecteddomaindetection,andshapefeatureextractionisputforward.Onthefoundationofextractingmovingobjectsbymulti-Gaussianmodelingmethod,theconstructionsceneofengineeringmachineryinpathofpowertransmissionlinecanbedetected,identifiedandjudgedbythisalgorithm.Experimentsverifythatthemovingengineeringmechanicalcranearmcanbeaccuratelyandreliablyextractedbythisimageprocessingalgorithm.
EngineeringmachineryPowertransmissionlineImageprocessingElectronicimagestabilizationConnecteddomaindetection
谭越(1990—),男,现为西华大学机械电子工程专业在读硕士研究生;主要从事单片机及其嵌入式控制方向的研究。
TH-39;TP277
A< class="emphasis_italic">DOI
:10.16086/j.cnki.issn1000-0380.201610012
修改稿收到日期:2016-03-10。
