一种室内障碍物与地面分割的快速方法
2016-11-04刘桂华李志雄
卜 燕 王 姮 张 华 刘桂华 李志雄
(西南科技大学特殊环境机器人技术四川省重点实验室,四川 绵阳 621010)
一种室内障碍物与地面分割的快速方法
卜燕王姮张华刘桂华李志雄
(西南科技大学特殊环境机器人技术四川省重点实验室,四川 绵阳621010)
因地面含有丰富信息,常用来为室内移动机器人提供地图创建与导航的环境信息。考虑到光线反射对地面造成的干扰较强,在相似颜色环境下地面区分的难度较大,因此将高强光反射区定义为“缺陷”进行检测。利用其周边信息填充缺陷,有效增强了地面颜色的统一性。结合HSV联合密度进行彩色分割,利用地面位置区域特性,可准确获得地面与障碍物间的分割。试验表明,提出的方法具有运算简单、范围广、准确度高、便于机器人实时避障等优点。
图像处理图像分割图像识别地面分割颜色模型缺陷检测缺陷填充彩色增强阈值分割二值化联合概率
0 引言
地面信息以其易于获取的特性,常用于室内移动机器人的地图构建[1-2]、导航与定位[3-4]。王可等[5]引入三角形结构方法,有效地去除了非地面特征信息;Chia-How Lin[6]提出了基于地面的SURF特征匹配和自适应彩色分割相结合的方法;杜鹃根据金字塔连接算法,提出了彩色图像自动分割算法[7]。
由于室内地面的反光作用,导致地面出现亮度不均匀的情况,包括强反光区、阴影区等。有的室内地面和室内障碍物颜色相近,采用简单的直方图统计分割不精确。
针对此问题,本文提出视强反光区域为“缺陷”[8],进行缺陷检测并填充的方法,以增大地面与障碍物的对比度。该方法采用联合概率直方图阈值化对图像进行初分割,结合成像原理求取地面区域核心位置;再采用填充法获得地面图像,实现了对单调室内环境地面的快速分割。
1 颜色模型
基于彩色图像的处理,对颜色空间模型的选择至关重要。由于地面反光区域曝光度高,彩色信息为白色,故本文选用RGB模型进行对应“缺陷”的检测及填充增强。同时,由于室内环境颜色单调, HSV分量与图像的彩色信息无关,故适用于地面分割。
1.1RGB模型
RGB模型分为红(R)、绿(G)、蓝(B)3个颜色通道,基于由红、绿、蓝三原色光谱分量的笛卡尔坐标系组成的RGB模型坐标系统如图1所示。图1中,红、绿、蓝位于3个角上;青、品红和黄位于另外3个角上。在该模型中,RGB彩色模型为图像中每一个像素的RGB分量分配一个[0,255]范围内的强度值,就可以使它们按照不同的比例混合,其灰度等级沿着{(0,0,0),(255,255,255)}两点连线分布。

图1 RGB模型坐标系统Fig.1 Coordinate system of RGB model
1.2HSV模型
HSV模型由H、S和V这3个分量组成,如图2所示。图2中:H分量表示色调(hue),S分量表示饱和度(saturation),V分量表示亮度(value)。色调是描述纯色的属性,用角度度量,取值范围为0°~360°。从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°;作为它们的补色,黄色为60°,青色为180°,品红为300°。饱和度用来表示纯色被白光稀释的程度,取值范围为[0,1],其值越大,颜色越饱和。亮度是一个主观的描述子,范围为[0,1],表示色彩的明亮程度。
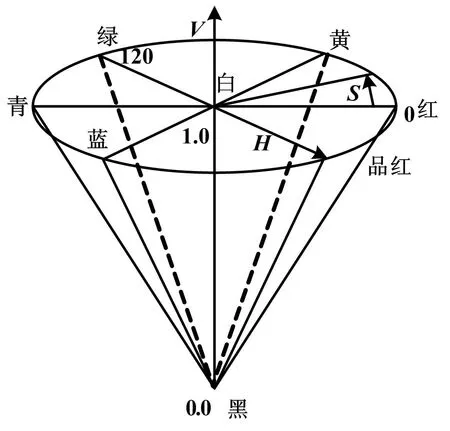
图2 HSV色彩空间模型Fig.2 HSV color space model
1.3RGB到HSV的变换
对于任一幅RGB彩色格式的图像,每一个RGB像素的H、S、V分量可用下式得到。R、G、B值的范围为[0,1]。
V=max(R,G,B)
(1)
S=[V-min(R,G,B)]/V
(2)

(3)
如果所得的H<0,由于色调信息H的范围为0°~360°,则H=H+360。
2 缺陷检测及填充
利用地面亮白区域的RGB特性进行缺陷检测并填充,可恢复地面信息。
①由RGB彩色模型可知,白色区域的R、G、B分量信息值都比较大,由此可采用RGB联合阈值分割定位亮白区域。当R、G、B的值都分别大于该分量的阀值,则判定Ii,j为亮区域;否则,为暗区域。
(4)
式中:TR、TG、TB采用经验阈值法,一般情况下均大于240。由于地面反射强光区面积集中,则缺陷检测时规定区域像素点个数阈值为n=20。
②缺陷检测的结果为不规则的一些白色区域,对其进行填充时,取缺陷区域中某点为中心,利用式(5)查找周边内容距离最近的非缺陷像素点位置(K,T),并复制其彩色信息,如式(6)所示。
(K,T)=argmin(‖(k,h)-(i,j)‖2)
(5)
(6)
缺陷填充如图3所示,箭头方向代表了缺陷填充的方向。
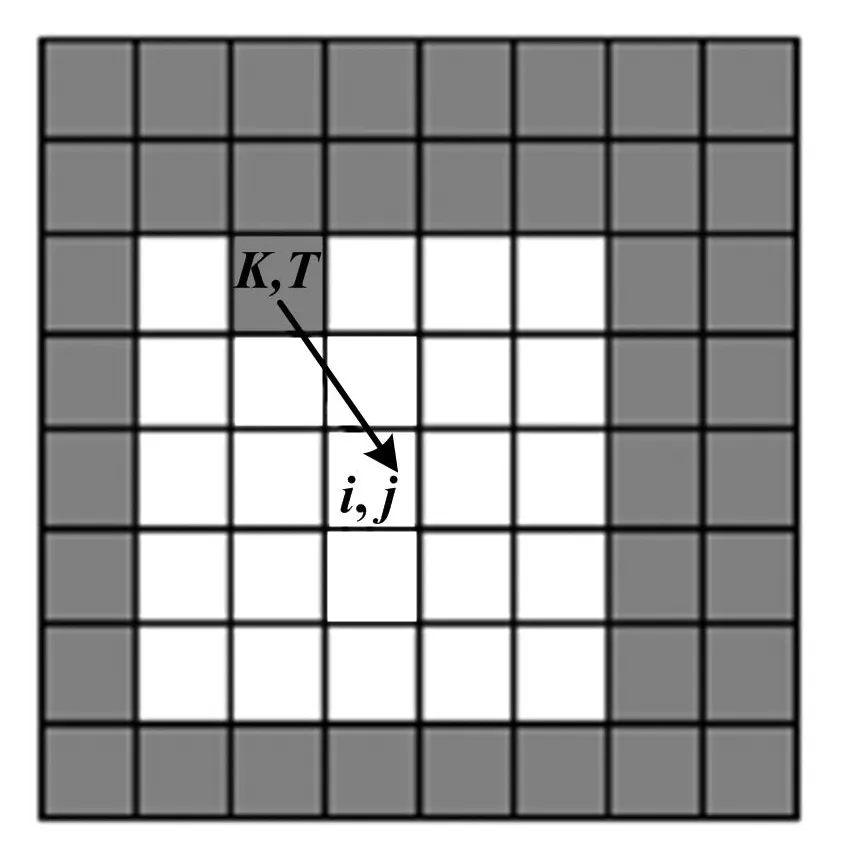
图3 缺陷填充示意图Fig.3 Schematic diagram of defect filling
3 基于位置区域的分割
3.1联合HSV阈值分割
针对已增强的图像,地面彩色特征明显,利用RGB转换为HSV分量后,为了得到比较好的灰度图及其直方图,将这3个分量的范围都调整至[0,255]。用Otsu提出的最大类间方差法求出各分量的自适应阈值Hth、Sth、Vth,再利用联合概率阈值分割进行二分化。对于输入图像f(x,y),定义输出图像如下:
(7)
Kth=αHth+βSth+γVth
(8)
式中:联合概率Kth由式(8)获得,通过调整控制因子α、β、γ,可以改变其分割性能。
3.2基于位置区域的地面判定
联合H、S、V阈值分割,可得到大面积的地面分割图,其中,部分空间存在噪声。由成像原理可知:地面区域位于一副图像中的从下往上延伸部分。在机器人行走过程中,当遇到纸盒和水杯时,其背后的地面都不能判定为可行走区域。
本文只判定当前位置可行走的地面区域,因此定义地面分割界限的上半部分都为障碍物。采用由下而上的形态学法填充图像,最终可得到图像下半部分连通的地面区域,适用于机器人导航。
4 试验与分析
试验图像在单调颜色环境中的试验室中采集得到。首先对可能出现亮白区域图进行缺陷检测与填充,原图中因反射灯光及窗外光线在地面形成的亮白区域及灯光、窗户光源体都能被有效检出;接着,检测到的缺陷区域用四周信息进行迭代填充,灯光由周边天花板信息组成,窗户由相邻的墙壁填充得到,地面区域由周边地面信息迭代得到。
在缺陷检测填充过程中,强灯光区域分割精确,地面填充区域与整体地面信息吻合,具有较高的真实性,保证了地面元素的一致性。同时,缺陷填充图像的均方差和平均灰度值减小,总像素和中97%的像素所占灰度值范围减小,为分割减少了强光干扰,提高了地面与障碍物间的区分度。彩色增强对比如表1所示。

表1 彩色增强对比表Tab.1 Contrast of color enhancement
填充缺陷后联合H、S、V的阈值分割得到的二值图像表明,地面和障碍物交接处分割完整,地面噪声少,可用于位置区域判定障碍物区域。与单阈值H分量的分割结果相比,地面区域中噪声多。本文的分割算法能取得较精确的结果,使地面划分区域更连续。
结合地面在图像中从下往上的成像原理,以地面与障碍物相邻处为界,采用连通区域划分,获得地面与障碍物分割结果。其中:地面区域为黑色,障碍物区域为原始色彩图像。
试验还针对地面区域不规则情景进行了处理,地面区域位置仍然是从下往上,地面与障碍物分割精确,证明了本方案的广泛性和有效性。除此之外,本文提出的算法都是线性变换,运算复杂度小,易于实现。
5 结束语
本文对室内单调彩色图像地面识别展开研究。首先,针对出现高亮光斑的地面,采用基于RGB联合阈值分割法检测光线反射引起的地面高强光区域“缺陷”,通过填充缺陷增加了地面的统一性、提高了地面与障碍物的对比度。然后,利用彩色分量联合阈值进行初分割,得到地面的核心区域;结合地面在图像中成像位置的特殊性进行区域连通,实现了地面分割。
试验证明,本文提出的方法解决了地面缺陷、单调色彩图区分度低的问题,能为机器人导航提供快速的行走区域判定,具有重要的实用价值。下一步工作将研究地面和不同障碍物的分割,以实现更明确的移动机器人定位。
[1] 王锋,程敏,陈小平.面向机器人室内建图的RGB_D图像对齐算法[J].机器人,2015,37 (2):129-135.
[2] 杨鸿,钱堃,戴先中,等.基于Kinect传感器的移动机器人室内环境三维地图创建[J].东南大学学报(自然科学版),2013,43(S1):183-187.
[3]PANAHANDEHG,JANSSONM.Vision-aidedinertialnavigationbasedongroundplanefeaturedetection[J].IEEE/ASMETransactionsonMechatronics2014,16(4):1206-1215.
[4]PANAHANDEHG,MOHAMMADIHAN,JANSSONM.Groundplanefeaturedetectioninmobilevision-aidedinertialnavigation[J].IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems,2012:3605-3611.
[5] 王可,贾松敏,李秀智,等.基于地面特征的移动机器人单目视觉里程计算法[J].光学学报,2015,35(5): 245-251.
[6]LINCH,JIANGSY,PUYJ,etal.Robustgroundplanedetectionforobstacleavoidanceofmobilerobotsusingamonocularcamera[C]//The2010IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems,2010:3706-3711.
[7] 杜娟,李文锋.基于金字塔连接算法的彩色图像分割[J].武汉理工大学学报,2006,28(1):112-114.
[8]FRIEDO,SHECHTMANE,GOLDMAND,etal,FindingDistractorsInImages[C]//IEEEInternationalConferenceonComputerVisionandPatternRecognition,2015:1703-1712.
Fast Method for Segmenting Indoor Obstacle with Ground
The ground is usually used to provide environmental information of map creation and navigation for indoor mobile robots because it contains rich information.Considering the strong interference caused by light reflection,it is difficult to distinguish the ground surface under similar color environment,so the high intensity light reflection areas are defined as “defect” to be detected.By filling defect with its periphery information,the ground color uniformity can be effectively enhanced.Combining with the HSV joint density,color segmentation is conducted,and using regional characteristics of ground position,the segmentation of obstacle with ground is obtained precisely.Experiments show that the proposed approach features simple operation,wide range,high precision,and ease to implement obstacle avoidance for robot in real time.
Image processingImage segmentationImage recognitionGround segmentationColor modelDefect detectionDefect fillColor enhancementThreshold segmentationBinarizationJoint probability
卜燕(1990—),女,现为西南科技大学控制科学与工程专业在读硕士研究生;主要从事图像处理方向的研究。
TH181;TP391
ADOI:10.16086/j.cnki.issn 1000-0380.201610004
四川省教育厅重点基金资助项目(编号:14ZA0096);
四川省科技支撑计划基金资助项目(编号:2015GZ0035);
四川省科技创新苗子工程基金资助项目(编号:2015024);
四川省重点实验室开放基金资助项目(编号:13zxtk05);
西南科技大学研究生创新基金资助项目(编号:15ycx119);
西南科技大学创新团队基金资助项目(编号:14tdtk01)。
修改稿收到日期:2016-01-22。
