一种高速公路收费站车辆排队长度监测系统
2016-11-03李彬亮韩国华姚舜禹李鹏鸽
李彬亮 韩国华 姚舜禹 李鹏鸽
摘要:高速公路收费站是车辆通行集中的地方,尤其是节假日期间,车辆的集中出行会造成车辆大排长龙的现象,这对人们出行和道路交通控制造成了很大困扰。及时掌握高速公路收费站的车辆排队长度,对交通管理部门和高速公路公司采取多开闸口或免费放行政策都有着重要的意义。文章介绍了一种高速公路收费站车辆排队长度监测系统。
关键词:地磁传感器;高速公路收费站;排队长度检测;监测系统;车辆排队 文献标识码:A
中图分类号:U491 文章编号:1009-2374(2016)26-0009-02 DOI:10.13535/j.cnki.11-4406/n.2016.26.005
随着社会经济的高速发展、人口的持续增长以及人民生活水平的逐渐提高,我国机动车保有量也正以前所未有的速度增加,庞大的机动车数量使得城市道路及其交通设施不堪重负,局部甚至大面积的交通拥堵时常发生。高速公路收费站是车辆通行较为集中的地方,尤其是节假日期间,车辆的集中出行往往会造成车辆大排长龙的现象,这对人们出行和道路交通控制造成了很大的困扰。及时掌握高速公路收费站的车辆排队长度,以便交通管理部门和高速公路公司及时采取多开闸口或免费放行政策都有着重要的意义。目前交通流检测技术主要对道路车流量、车速检测、行人密度进行检测,传输至交通信号中心平台,以便控制和决策。高速公路收费站排队长度作为道路通行能力重要的评价指标,目前主要采用视频图像、GPS技术和磁感线圈等处理方式进行检测,都存在一定的问题。本文通过提出一种基于地磁传感器的高速公司收费站车辆排队长度的监测系统,为交通管理部门实时监控交通运行情况提供帮助。
1 研究现状
目前我国车辆排队长度检测方法大体可以分为三类:
第一,通过设置磁感线圈、微波探测器、雷达等传统交通监测设备进行排队长度检测及计算。其中布设磁感线圈对路面破坏较大且探测结果易受环境影响,而微波探测器和雷达灵敏度高、控制范围大,但受制于环境影响,存在一定的场强分布不规则情况,有形成误报区域和漏报区域的可能性。传统交通检测设备均存在一定的局限性。
第二,通过GPS数据对车辆排队长度进行检测。在高GPS精度情况下,该类方法能够较为准确地反映出车辆排队情况。但目前民用GPS精度不足,在车辆位置测定中存在一定偏移,不容易精确地计算出车辆排队长度。对此,国内外许多学者对GPS检测方法进行了改进研究。如参考文献[1]以GPS点在路口前的集聚为基础,通过设立交通需求函数分析路口排队长度。参考文献[2]和参考文献[3]以浮动车(GPS探测车)点数据为切入点,根据密度、加速度等不同参数变化情况建立了车辆排队长度检测算法。经过改进后车辆排队长度GPS检测精度均有较大提升。
第三,通过视频数据对车辆排队长度进行检测。视频检测成本低、覆盖范围广、受环境影响小,准确度也相对较高,其理论误差可以控制在8%以内,随着背景差别法、canny边缘检测法等视频识别技术的不断深入,视频数据检测算法也日趋成熟,但受制于视频监控设备取景角度、取景范围以及天气、车辆远近等因素影响,视频检测机制仍然存在一定缺陷。
相对于以上三类车辆排队长度检测方式,地磁传感器安装尺寸小、灵敏度高、使用寿命长、对路面破坏小,且其探测机制主要利用地球磁场在铁磁物体通过时的变化进行检测,对环境要求较低,能够准确地识别车辆存在和通过车型。目前我国基于地磁传感器的车辆排队长度算法研究相对较少,其中张永终等人融合地磁检测方法设计了一种多传感器融合检测系统,实现了对各方向排队长度的检测;贾利民等人根据单个地磁传感器数据反馈的车辆经过时长、车头车尾时距等动态变化规律,提出了车尾时距模型、通过时间模型和综合模型,为排队长度检测提供了一个新的算法。本文基于地磁传感器在高速公路收费口的实际应用,利用多车道车辆通过距离收费站200m、125m、50m地磁传感器时的波形、时长等关键信息,提出了一种新的车辆排队长度算法。
2 系统架构
2.1 系统框架
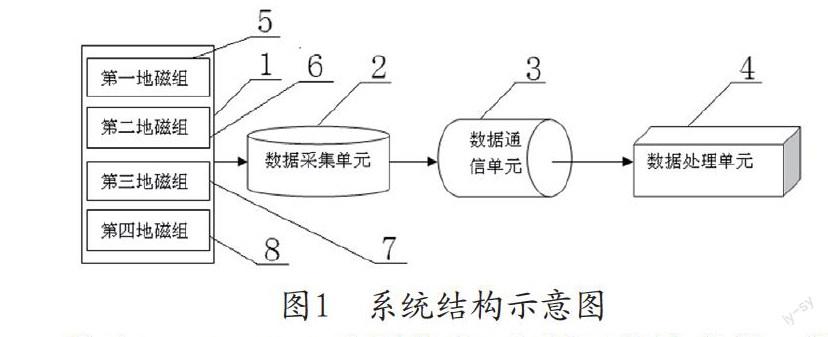
本系统的目的旨在提供一种能有效监测高速公路收费站车辆排队长度的监测方法。包括依次相连的地磁单元、数据采集单元、数据通信单元和数据处理单元;所述地磁单元包含多个地磁组,地磁组以收费站闸机为起始点,沿车辆排队等待方向各间隔一段距离埋设在对应的行车道上。所述数据采集单元采集每个地磁上车辆通过速度及车辆占有时间数据并通过数据通信单元传输至数据处理单元,数据处理单元通过对最近一段时间内各个地磁车辆通过速度及车辆占有时间数据的分析计算,得出车辆排队等待的队列长度。所述数据处理单元对最近5分钟内的数据进行分析计算,得出车辆排队等待的队列长度。相对于其他检测技术具有以下优点:(1)该车辆排队长度监测系统结构简单,通过预埋设的4组地磁采集车辆通过地磁的速度和占有时间,并将这些数据用数据处理单元分析计算得出车辆排队长度,从而为交通管控提供了重要的参考依据;(2)该车辆排队长度监测系统所依据的方法理论经过了实际的检验,为道路交通中监测车辆排队提供了有效的数据。
数字5、6、7、8分别代表4个断面的地磁组,数字1代表由这4个地磁组集合而成的数据包;数字2代表数据采集单元;数字3代表数据通信单元;数字4代表数据处理单元。总的来说就是1是数据上传;2是数据采集;3是数据通信(传输);4是数据处理(后台服务器)
2.2 设备布设
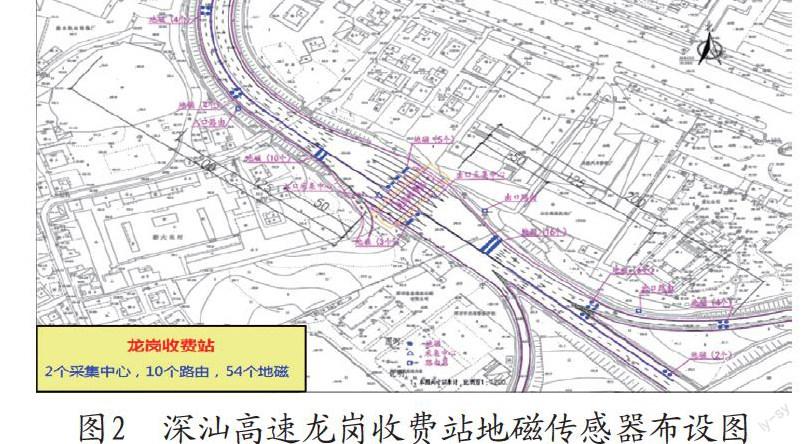
为进一步的详细说明该系统,下面就试验效果进行阐述。该系统试验地点位于深圳市深汕高速龙岗收费站进口,地磁传感器分别布设在距离收费站0m、50m、125m、200m的各车道上。如图2所示:
如图1所示,高速公路收费站出入口分别埋设有4道地磁,分别位于闸机位置处(断面1),距离闸机断面位置50m处(断面2)、125m处(断面3)、200m处(断面4)。
数据采集单元2采集每个地磁上车辆通过速度及车辆占有时间数据并通过数据通信单元3传输至数据处理单元4。数据处理单元4通过对最近一段时间内各个地磁车辆通过速度及车辆占有时间数据的分析计算,得出车辆排队等待的队列长度,进一步的,数据处理单元4是对最近5分钟内的数据进行分析计算,得出车辆排队等待的队列长度。实践中,对地磁数据进行分析后,发现实际数据存环境存在噪声、异常数据,因而提出了从降噪的方向解决问题的思路;在分析了终端设备数据及结合设备的布设情况、对地磁数据进行分析及结合交通学方面的专业知识,发现单位时间内平均速度既能反映出道路的拥堵、畅通特征,又能对漏车、换道及数据异常等情况具有较好的降噪、容错性;在确定思路后,从速度历史曲线图分析总结规律,发现了通过速度推导排队长度的计算方法,并使用视频验证结果的方法验证了结果,确保推导过程的正确性,最终确定了排队长度算法,同时利用数据分析的方法推导出了地磁平均占有时间与平均速度之间存在着强相关关系,通过对历史数据进行分析,得到平均占有时间与排队长度的计算方法。
通过地磁终端能够采集到的基本数据有车通过数量、速度、占有时间、车身长度等。车辆在行驶过程中会因为各种情况产生噪声数据,如:(1)车辆在经过地磁时变换道路,导致产生多条数据,导致车辆通过数量、速度、占有时间等数据出现异常值;(2)车辆在两条道路之间行驶,导致一辆车产生两条数据或者导致地磁采集不到数据;(3)出入口存在岔路的情况,导致经过地磁断面4或者断面3的车辆不一定经过断面2。
由于数据中存在部分的噪声数据、漏检、多检数据,在计算时,需要选取既跟排队长度(拥堵情况)有强相关关系,又具有较好的容错性数据进行计算;我们这里选取了单位时间内的平均速度与统计时间内的平均占有率速度作为计算;由于平均占有时间跟速度具有强相关关系,算法也兼顾了通过平均占有时间计算排队长度的方法。
3 系统功能模块
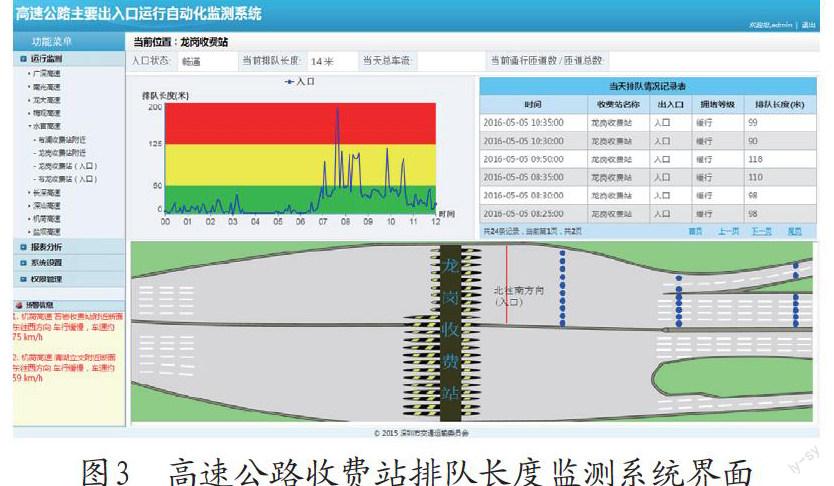
该系统通过采集各收费站出口或入口的车流、排队长度等数据,系统界面显示收费站示意图及匝道数,分别实现以下三个功能:(1)界面最顶层显示收费站排队的总体情况,当前的排队长度、当天累计车流、当前通行匝道数/总匝道数;(2)中间左侧用红、黄、绿三种不同颜色表示收费站排队总体情况(通过绿色、黄色和红色分别代表排队长度处于0~50m、51~125m和126~200m区间的排队长度),同时可通过纵轴了解具体排队长度;(3)中间右侧表格记录该收费站当天排队长度大于50m的所有情况。
4 结语
通过对照系统显示数据及现场视频拍摄情况进行实测,该系统达到了监测车辆排队长度的要求,并且对于异常、漏报数据有很好的容错性,一定程度上能够降低地磁埋设成本、施工要求及后期维护要求,能够保证排队长度数据的稳定性和准确性。通过对高速公路主要断面及出入口运行自动化监测,能进一步提升高速公路的出行服务质量和服务水平,为市民节假日出行提供实时、有效的路况信息,合理引导车辆出行。
参考文献
[1] 王东柱,陈艳艳,李亚蒙.基于浮动车停车点数据交叉口车辆排队长度计算方法[J].公路交通科技,2012,29(12).
[2] 熊英格,徐卓立,刘好德.基于浮动车数据的交叉口范围动态划分方法[J].交通信息安全,2009,27(5).
[3] 杨永辉,黄磊,刘昌平.基于视频分析的车辆排队长度检测[J].计算机应用研究,2011,28(3).
[4] 张永终,张军强,乔志龙.基于多传感器融合的排队长度检测系统设计[J].道路交通与安全,2015,15(3).
(责任编辑:黄银芳)
