机械式冲床停上死点位置的控制策略设计与实现
2016-10-31秦文强何通能陈德富李华楠
秦文强,何通能,陈德富,李华楠
(浙江工业大学 信息学院 电子信息与智能系统研究所,杭州 310023)
机械式冲床停上死点位置的控制策略设计与实现
秦文强,何通能,陈德富,李华楠
(浙江工业大学 信息学院 电子信息与智能系统研究所,杭州310023)
机械式冲床进行冲压操作时,上死点位置的精度是最关键的问题之一;为了提高冲床停上死点位置的精度,研究了冲床刹车后由于惯性而转过的角度与刹车时影响因子的关系,拟合出刹车曲线,利用此曲线保证冲床刹车后能准确停在上死点;介绍数据的获取方法及流程,利用BP神经网络对冲床刹车曲线进行拟合,以均方误差作为衡量拟合效果的评价指标,并与最小二乘法拟合的曲线进行比较;分析两种方法对冲床刹车曲线的拟合效果,均方误差分别为0.006 092 3和1.624 7,实验结果表明,使用BP神经网络对冲床刹车曲线拟合的效果较好。
机械式冲床;上死点;刹车曲线;BP神经网络
0 引言
在国民生产中,冲压工艺相比传统机械加工有节约材料和能源、效率高、对操作者技术要求不高、通过各种模具的应用就可以加工出机械加工所无法完成的产品等优点,因而它的用途越来越广泛[1]。冲床进行冲压加工时,都严格要求滑块能够准确停在上死点,这样才能保证冲压加工时有足够的能量进行冲压操作,所以冲床刹车曲线的精度非常重要[2-3]。
市面上大部分的冲床控制系统使用PLC作为主控制单元,由于PLC计算能力有限,这类控制器一般使用查表法计算冲床上死点的刹车位置,即把事先测量的数据按照一定规则和顺序编制成表格,查表程序根据需要查表的值,查出最终所需要的结果[4]。由于冲床进行冲压操作时低速和高速的区间范围大,这就需要编制一张很大的表,势必会增加查询的时间,而且这种方法并不能精细地表示冲床的刹车规律,因而拟合精度偏低。另一种拟合方法是根据经验,选取一个多项式,利用最小二乘法拟合出冲床的刹车曲线,该方法有一定的智能性,通过分析拟合结果发现,冲床的刹车曲线并不能简单地用多项式进行表示,因而精度也不甚理想。
BP网络(Back-Propagation Network,BP)是一种以误差逆向传播算法进行学习训练的多层前馈型神经网络,是应用最为广泛的神经网络之一,具有很强的非线性映射能力,解决非线性问题是它最为突出的一环[5-6]。BP神经网络结构简单,具有较高的误差精度,易于编程实现,具有较强的可操作性。笔者将BP神经网络应用于冲床刹车曲线的拟合中,使用样本数据建立了BP神经网络的冲床上死点刹车位置预测模型,并用测试数据对预测结果进行了细致分析。
1 机械式冲床停上死点位置的控制结构及原理
机械式冲床通过曲柄连杆机构将电动机的旋转运动转换为滑块的往复直线运动,并使其获得材料冲压成形所需要的力和直线位移,滑块运动的最高位置即为上死点位置。
本文研究的机械式冲床控制系统主要由离合器、制动器、电气控制装置、触摸屏人机界面等组成。离合器和制动器位于曲柄滑块机构与大齿轮之间,当需要滑块运动时,ARM控制器输出控制信号使离合器接合、制动器断开;当需要滑块停止运动时,控制离合器断开、制动器接合,由于惯性的作用,正在以一定速度运动的滑块并不会立刻停止运动,而是会继续运动一段距离最终停止在某一位置。
本文采用跟曲轴相连的旋转编码器作为冲床停上死点位置的角度检测传感器,将采集到的角度信号经编码器输入接口电路送入ARM控制器,控制器根据固定Δt时间内编码器的脉冲个数,计算出曲轴的当前转动速度,根据下文所研究的冲床停上死点位置的BP神经网络回归模型,即可确定出当前速度下的上死点位置停车制动角度。若ARM控制器接收到上死点位置停车控制信号,控制器会反复判断滑块是否到达制动角度,当滑块到达制动角度时,控制离合器断开、制动器接合。
2 BP神经网络学习算法分析
BP网络能够学习和存储大量的输入输出映射关系,而无需事前揭示描述这种映射关系的学习方程。它的学习原理是:输入信号通过隐含层神经元作用于输出神经元,经非线性变换,产生输出信号,计算网络的实际输出与期望输出的偏差,调整各层神经元的权值和阈值,使误差沿梯度方向下降,经过反复训练,使网络的输出值达到期望值[7]。BP网络算法的计算过程如下:
1)隐含层第i个神经元的输入Neti、输出yi:
(1)
(2)
wij表示隐含层第i个神经元跟输入层第j个神经元之间的连接权值;xj表示输入层第j个神经元的输入;θi表示隐含层第i个神经元的阈值;φ(x)表示隐含层神经元的激活函数。
2)输出层第k个神经元的输入Netk、输出ok:
(3)
(4)
vki表示输出层第k个神经元跟隐含层第i个神经元之间的连接权值;ak表示输出层第k个神经元的阈值;ψ(x)表示输出层神经元的激活函数。
3)第k组样本输入时的二次型输出误差ek,p组训练样本的总误差E:
(5)
(6)
Tk表示第k组样本的期望输出。
4)根据误差函数对各层神经元权值、阈值的修正量Δwki、Δak、Δwij、Δθi,由BP算法的迭代公式,推出第n+1次迭代时网络的权值和阈值:
(7)
(8)
(9)
(10)
3 样本数据和测试数据获取
本文中研究的冲床控制系统由上位机和下位机两部分组成,上位机由触摸屏终端和以ARM控制器为核心的主控板组成,下位机由外围控制电路组成,上、下位机通过RS232进行数据通信。
冲床刹车曲线数据的获取流程如下:冲床处于停机状态,把冲床的运转模式调到寸动模式,点击上位机触摸屏界面的自学习按钮,正确输入密码后,进入冲床自学习设置页面,输入冲床自学习的次数(本文以38次为例)、冲床的调速方式(人工通过调速旋钮调速或通过变频器调速)等参数。点击开始学习按钮,触摸屏向上位机ARM控制器发送开始学习命令,上位机ARM控制器判断冲床的调速方式,若是通过变频器调速,通过MODBUS协议跟变频器通信,学习完一组数据后增加固定的频率,依次对应冲床不同的速度,本文以人工通过调速旋钮调速来研究。当冲床运转速度趋于稳定时,控制器发出刹车命令,等待冲床完全停止运动后,控制器记录下冲床刹车时的速度、离合器制动位置(0°~360°)、冲床气压大小、过冲角度等数据。数据记录完成后,冲床继续启动,速度增大,继续学习,直到学习完指定的次数。学习结束后,冲床停止运转,得到n组样本点,ARM控制器根据记录的n组样本数据依据特定的算法进行冲床刹车曲线的学习、训练,最后把计算的参数保存在flash中。冲床刹车曲线数据获取流程如图1所示。
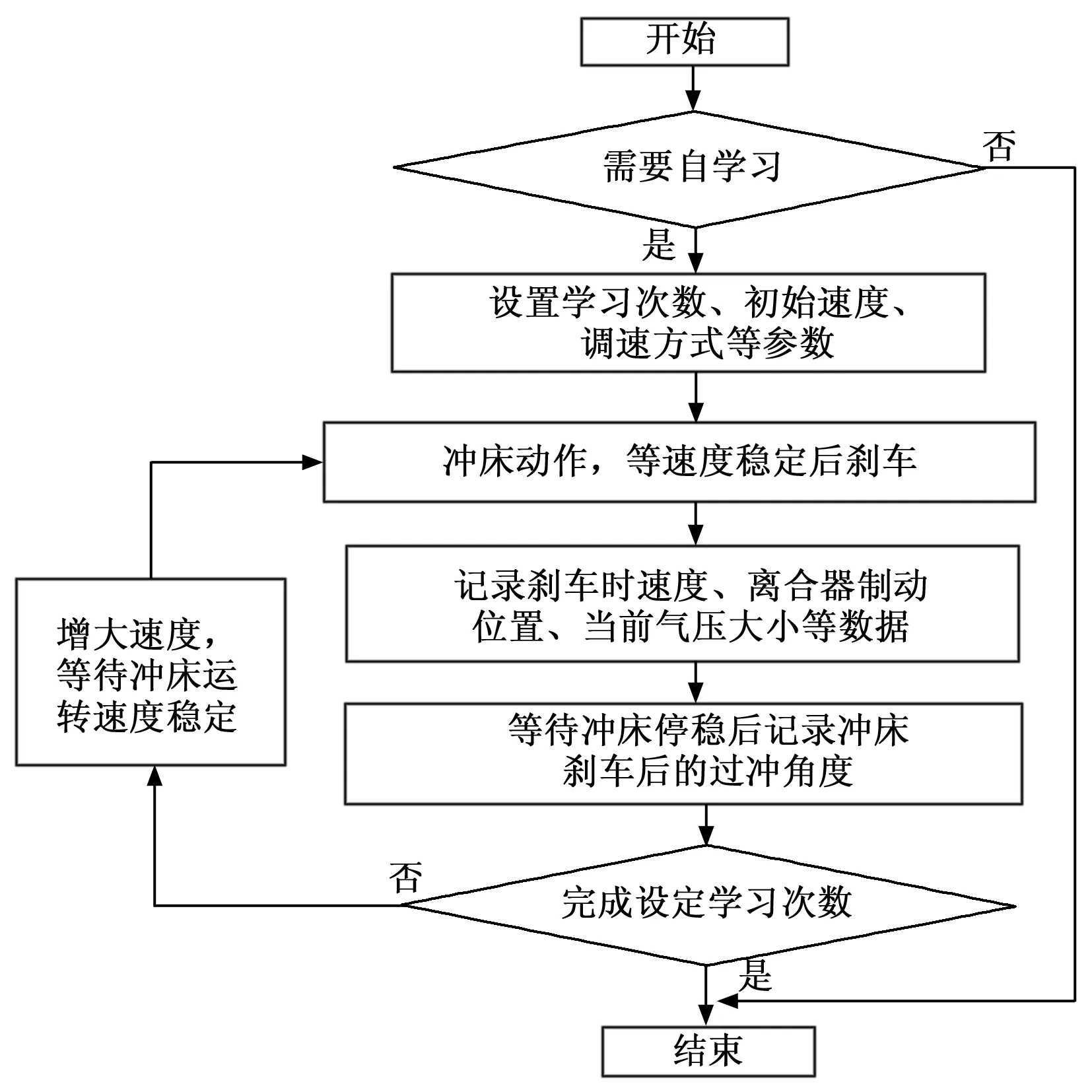
图1 冲床刹车曲线数据获取流程
通过研究发现,影响冲床刹车后过冲角度大小的主要因素是冲床刹车时的速度,选择冲床刹车时的速度作为网络模型的输入因子,冲床的过冲角度作为输出因子,对冲床停上死点刹车曲线进行分析。在建立网络模型的过程中,把数据分为样本数据和测试数据两个部分,表1是冲床刹车曲线样本数据,表2是冲床刹车曲线测试数据。
4 模型设计与参数选择
BP神经网络的隐含层层数和隐含层神经元的数量决定着所建网络的优劣,理论上讲,单隐含层的三层BP前馈神经网络可以实现任何复杂的非线性映射问题[8]。一般来说,隐含层神经元数目越多,网络的逼近能力越强,但会增加训练的难度和时间。本文所建的神经网络输入层有1个神经元,隐含层有20个神经元,输出层有1个神经元,网络的结构为1-20-1。
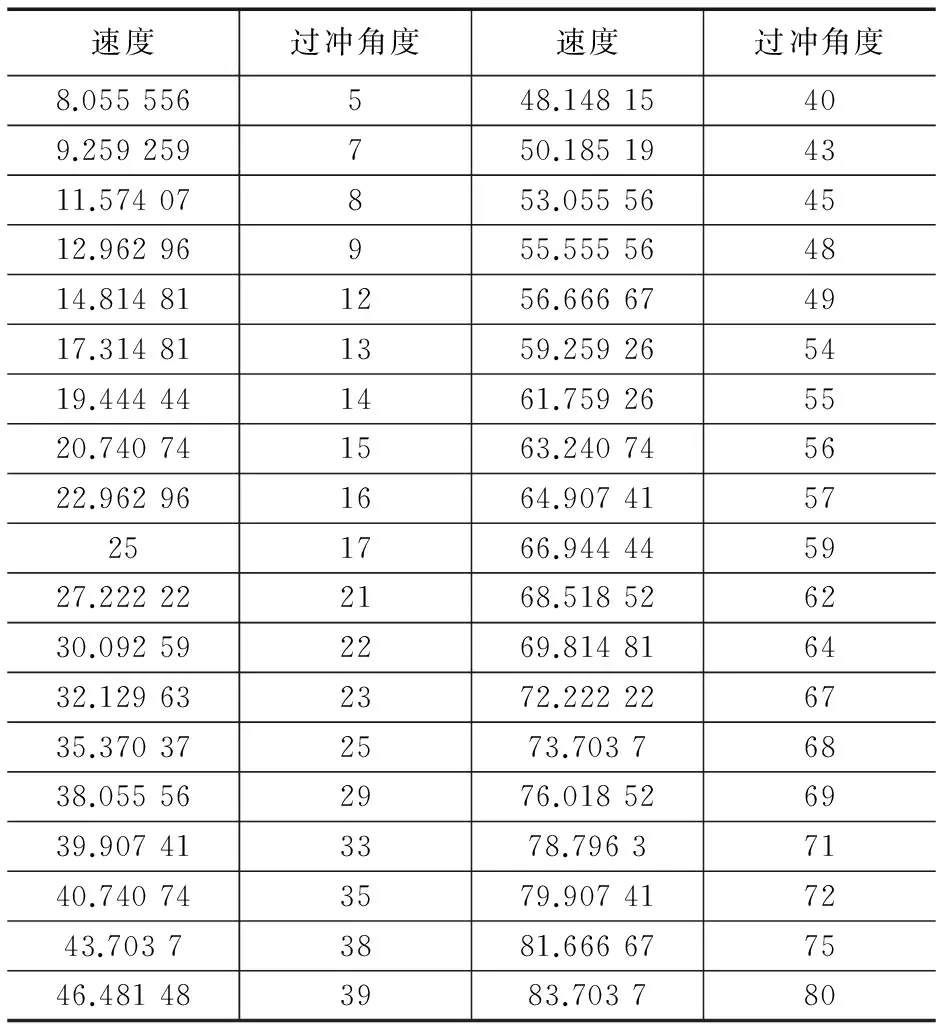
表1 冲床刹车曲线样本数据
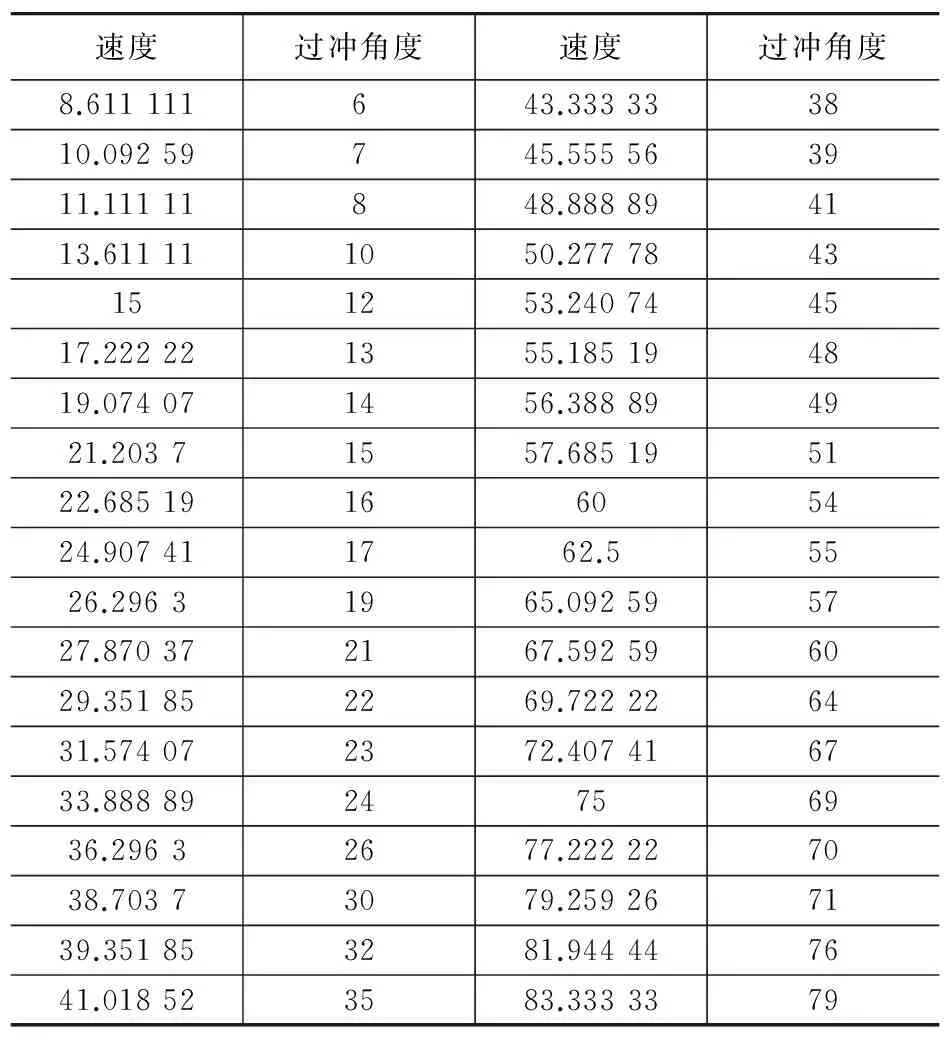
表2 冲床刹车曲线测试数据
网络的隐含层神经元转移函数采用Sigmoid函数,由于模型的输出层为冲床的过冲角度,如果转移函数还是选用曲线函数,输出则会被限制在一个很小的范围,故输出神经元的转移函数选用线性purelin函数。
BP神经网络的学习算法有很多形式,各种训练函数有不同的训练算法,Levenberg-Marquardt算法是目前最快的训练算法,本文建立的神经网络采用此算法作为训练算法。本文网络采用批处理模式,选取较小的学习速率,范围在0.01~0.8之间,以保证系统的稳定性。最大训练步长为500,目标误差为0.01。
为了消除各维数据间的数量级差别,避免因输入输出数据的数量级差别较大而造成网络的预测误差,本文对样本数据和测试数据进行了归一化处理,采用最大最小法进行处理,经过处理后的数据转化为[-1,1]之间的数据。
5 实验结果及分析
利用设计好的BP网络模型对冲床的刹车曲线进行拟合,并以均方误差mse作为衡量拟合效果的评价指标,为了更好地分析不同算法对冲床刹车曲线的拟合效果,笔者同时画出了使用最小二乘法拟合的曲线,并把两种方法拟合的曲线放在同一图中进行比较。最小二乘法、BP神经网络拟合的冲床刹车曲线如图2所示,冲床刹车曲线BP神经网络拟合的均方误差如图3所示,冲床刹车曲线BP神经网络拟合的相关系数如图4所示。
图2中,“o”表示样本数据的输入向量和目标向量之间的关系,虚线表示最小二乘法拟合出的曲线,直线表示BP神经网络拟合出的曲线,“*”表示测试数据的输入向量和目标向量之间的关系。
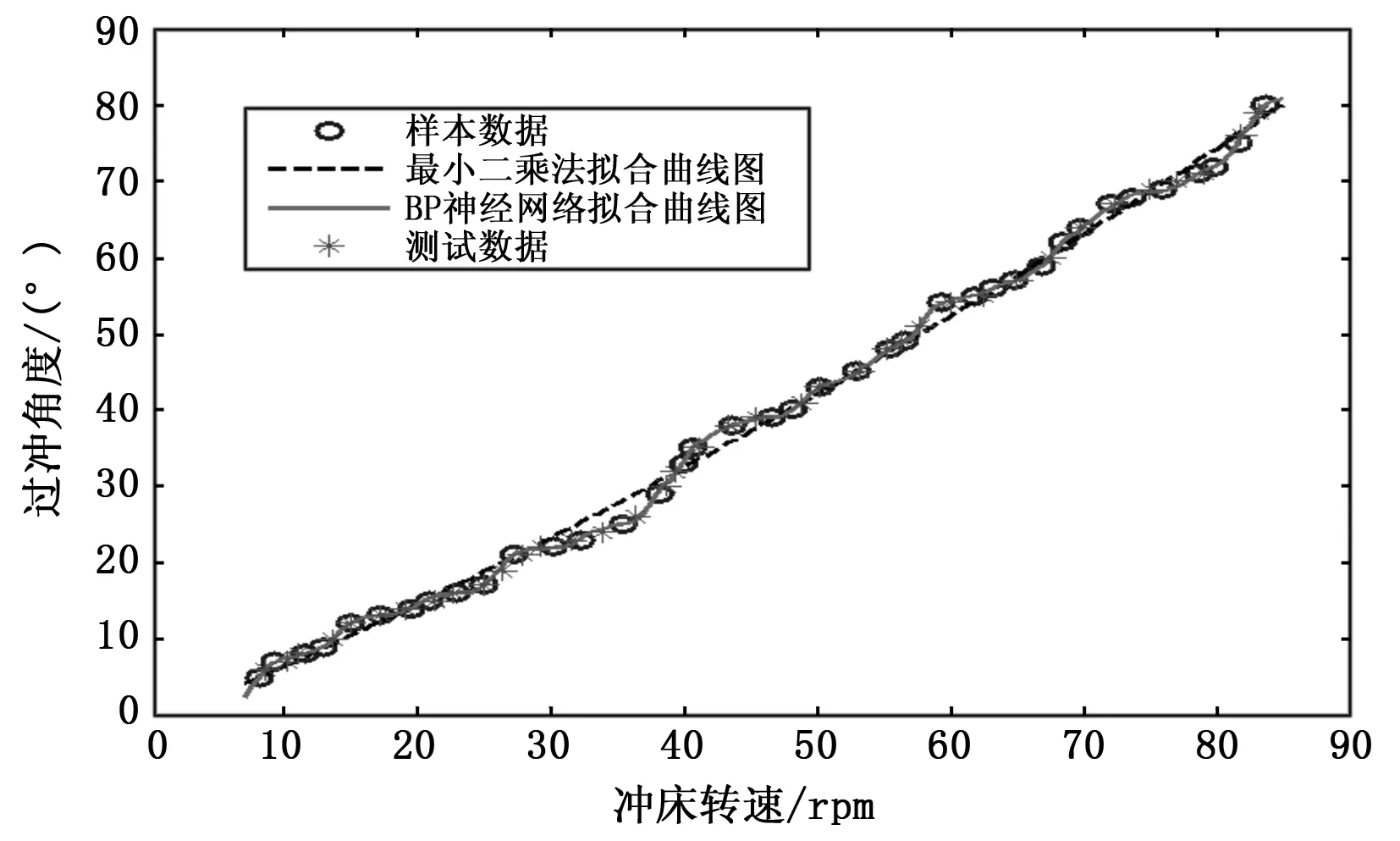
图2 最小二乘法、BP神经网络拟合的冲床刹车曲线
从图2可以看出,各样本数据点和测试数据点更多地落在BP神经网络所拟合的曲线上或分布在曲线附近,说明BP神经网络所拟合的曲线精度高,能够更好地逼近样本数据点和测试数据点,而且能更准确地预测出冲床停车时的刹车点。对于最小二乘法拟合的曲线来说,输出的均方误差mse为1.624 7,虽然样本数据和测试数据基本上在拟合的曲线附近,但是偏差较大,拟合效果不好。

图3 冲床刹车曲线BP神经网络拟合的均方误差
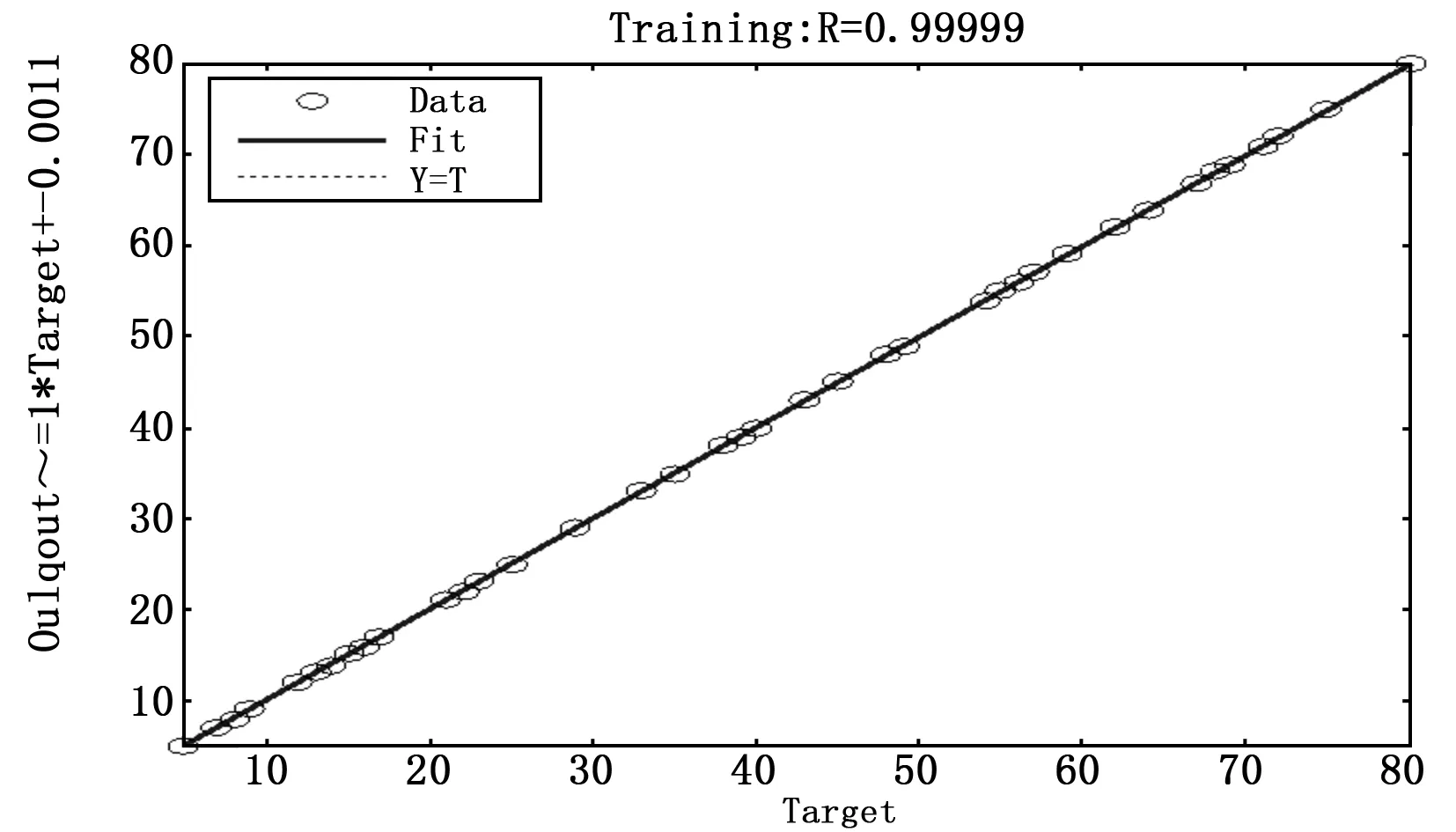
图4冲床刹车曲线BP神经网络拟合的相关系数
BP神经网络拟合曲线的相关系数R为0.999 99,此时网络的曲线拟合精度已非常高。由以上分析表明,经过训练后的BP神经网络对冲床刹车曲线拟合的效果较好。
6 结论
本文构建了冲床刹车曲线的BP神经网络回归模型,主要研究了冲床刹车后的过冲角度与刹车时速度的关系,以采集到的样本数据和测试数据进行实例分析,并与使用最小二乘法拟合的曲线进行比较,实验结果表明,使用BP神经网络拟合的曲线预测精度高,能够逼近样本数据点和测试数据点,可以很好地预测出冲床停车时的刹车点,得到了较好的非线性拟合效果。当然,本文仍然存在诸多不足,比如对冲床刹车曲线的影响因子研究不够全面,这是本文下一步研究的重点。
[1] 盈亮. 高强度钢热冲压关键工艺试验研究与应用[D]. 大连:大连理工大学,2013:7-10.
[2] 耿渝,孙成建,田世领. 精冲压力机上死点精度控制技术[J]. 锻压装备与制造技术,2012(6):26-27.
[3] 胡超,魏国勇,窦磊,等. 调速压力机自动停准上死点方法[J]. 锻压装备与制造技术,2010,45(3):27-28.
[4] 陈红,谢勤岚. 用查表法实现微处理器的快速CRC计算[J]. 交通与计算机,2003,21(3):73-75.
[5] 唐银凤,贺赛先,耿学贤. 基于优化BP神经网络的钢板测速修正方法[J]. 计算机测量与控制,2014,22(10):3105-3107.
[6] 张良均,曹晶,蒋世忠. 神经网络实用教程[M]. 北京: 机械工业出版社,2008.
[7] 韩力群. 人工神经网络教程. 北京: 北京邮电大学出版社,2006.
[8] MATLAB技术联盟,刘冰,郭海霞. MATLAB神经网络超级学习手册[M]. 北京: 人民邮电出版社,2014.
Design and Realization of Control Strategy of Mechanical Punch Stop Top Dead Center Position
Qin Wenqiang,He Tongneng,Chen Defu,Li Huanan
(Information and Intelligent System Institute,College of Information,Zhejiang University of Technology, Hangzhou310023,China)
The top dead center position accuracy is one of the most critical issues when a mechanical punch stamping operation. In order to improve the accuracy of punch stop top dead center position,the relationship between the angle of inertia and the influence factors is studied when a punch braked. We fit a punch brake curve and use it to ensure that the punch can accurately stop at top dead center. This paper introduces the method and process of data acquisition,and uses BP neural network to fit the punch brake curve. Using mean square error as the evaluation index,and compared with the least square method. The fitting effect of the two methods to the punch brake curve was analyzed. The mean square error is 0.006 092 3 and 1.624 7 respectively. The experiment result shows that using BP neural network to fit the punch brake curve is better.
mechanical punch; top dead center; brake curve; BP neural network
1671-4598(2016)04-0098-03DOI:10.16526/j.cnki.11-4762/tp.2016.04.029
TP272
A
2015-11-06;
2015-11-27。
秦文强(1989-),男,山东枣庄人,硕士,主要从事工业控制、机器学习方向的研究。