基于神经网络预测控制的污水处理控制器
2016-10-26刘玉章
刘玉章
石家庄技师学院
基于神经网络预测控制的污水处理控制器
刘玉章
石家庄技师学院
针对污水处理过程中采用传统的流量程序控制和时间程序控制的不足,该文设计了一种基于神经网络预测控制的溶解氧(DO)浓度控制器。文中详细介绍了该控制器的模型、结构、滚动优化方法和主要算法;在此基础上,设计了由AT89C52单片机实现神经网络预测控制器的硬件结构图。实地应用表明:该控制方法可使曝气池的DO波动范围较小,抗干扰能力较强,具有较好的鲁棒性,特别适合于慢时变的非线性控制系统。
污水处理;神经网络;预测控制;溶解氧DO;非线性系统
目前城市污水处理系统有相当一部分是采用单输入多输出的动态系统,该系统的特点是:以微生物处理作为主要手段,要求要达到具有脱磷除氮、水的质量要达到国家标准,运行费用低廉等目标。考虑到排送到污水处理厂的废水无论是在水量上、还是在水质上都具有随机变化的特点,因此很难使用传统的经典线性控制理论来进行控制,由于神经网络预测控制对解决非线性问题和复杂系统的控制有着特殊的优势[1],本文就神经网络预测控制在污水处理系统中的应用做一探讨。
一、活性污泥法污水处理过程
1.污水处理主要过程
活性污泥法处理工艺是大多数污水处理厂常采用的一种方法,主要工艺过程为:流入到污水处理厂的污水首先送入第一沉池去掉漂在水面上的悬浮物,接着送入主处理池---曝气池,为使微生物在曝气池中充分作用,同时将第二沉池中部分活性污泥也回流给曝气池已形成一定浓度的混合液,经吹入氧气(空气),并经搅拌使活性污泥与污水充分混合,以得到足够浓度的溶解氧DO(dissolved oxygen),使存活在活性污泥上的微生物分解,污水得到净化,从二沉池中流出;同时在二沉池内沉淀下来的污泥的大部分再被送回到曝气池,只有少部分污泥被排放掉[2]。如图1所示。

图1 活性污泥法污水处理流程框图
2.活性污泥控制法与传统控制法比较
传统控制法主要是它以固定流量和固定时间作为控制参数,实施固定流量程序控制和时间程序控制,而在实际中由于污水水量、污水浓度都是变量,因此容易造成出水口水质不合格的现象,而采用活性控制法是通过对污水水量、污水浓度及活性污泥的实时变化进行检测,找到一个最佳比例进行控制,因此能达到最佳控制效果。
二、神经网络预测控制器设计
1.预测控制器结构
所谓预测控制系统是指依据前一时刻和当前时刻的系统输入输出信息,预测下一时刻的输出值。并将下一时刻的预测值与当前值的误差作为反馈信号,再与标准输入值进行比较,经优化以求取最佳控制规律,来作为系统的控制输出,如图2所示。由于其基本思想是先预测后控制,因此具有一定的前瞻性。该控制器主要由预测单元、优化单元和反馈校正单元作为主要组成部分[3]。
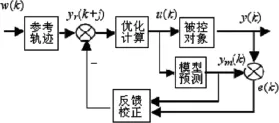
图2 预测控制系统原理图
(1)模型预测单元
模型预测是能够预测输出变量未来动态行为的变化趋势。它是一个信息集合。如阶跃响应模型、脉冲响应模型、CARIMA模型,神经网络模型等。
(2)误差反馈校正单元
由于实际系统的非线性,这就使模型预测单元输出量与实际输出量存在着差异,这时就需要对模型预测单元输出进行补偿和校正。其措施是在预测单元的控制中加入负反馈环节,以形成闭环控制。也就是将第i步的实际输出值y(i)与模型预测单元的输出值yk(i)之间的误差值e(i),补偿到模型预测单元输出值yk(i+n)(n为叠加步数,n为自然整数)上,如此便可得到闭环输出的预测值为:

式中e(i)为i时刻模型预测单元的输出误差值,f为补偿系数。
(3)优化单元的滚动优化
模型预测控制的功能是使系统的输出值在将来z步范围内的预测值与标准值之间的误差达到最小。也就是说在任一个采样时刻i,优化单元始终是以此时刻作为起点,以将来z步范围内的性能为指标,以求得最优控制规律u(i),并将当前时刻的u(i)作用于系统,以求取下一时刻预测值yz(i+n),从而实现滚动优化。其最大叠加步数为:

式中qn为误差修正系数,rn为控制修正系数,Δu(i+n-1)=u(i+n-1)-u(i+n-2),yr(i+n)为参考轨迹;参考轨迹的形式为[4]:

式中g为输入给定值,T0为标准输入轨迹常数,T为采样周期。
模型预测控制中所采用滚动式优化方法,只管每次进行优化计算所到得的结果只是一个局部的过程优化解,但由于在计算过程中实施的是滚动优化,所以对模型的非线性等能够及时的得到校正。
2.模块预测单元模型
对于非线性动态过程,为使在控制中达到满意的效果,通过多种控制方法比较可知,最佳的控制方法是采用神经网络控制。设神经网络为图3所示的三层前馈网络。该网络的输入为系统历史的输入与输出信息,网络的输出为系统的输出。

图3 用作预测模型的前馈神经网络结构
其表达式为:

式中ym(i)是前一时刻m个输出与前一时刻n个输入的预测值。F为非线性函数。利用上式进行反复推算可得到i步超前预测模型,如下式所示。

很明显,在该模型中用到了i时刻以后的预测值ym(i+n),而对i时刻及前一时刻的预测值,可用ym(i+n-l)=y(i+n-l)(n-l≤0,l为自然整数)来代替。
由此可见,要建立系统的神经网络预测模型,应首先考虑以被控对象的输入参数以及输出参数作为该系统的样本模式,建立具有一定控制模式和精度的神经网络模型,使其输出值ym(i)以最大限度的接近被控对象的实际输出值y(i)。
3.神经网络预测控制器结构
基于以上模型,并根据预测控制原理进行滚动优化。预测控制器采用的性能指标函数除上式外,同时还应使:
e(i+n)=yd(i+n)-y(i+n)
若该预测控制器中的△u(i)是收敛的,预测模型输出误差e(i+ n)应趋于零,此时可根据未来输出的期望值yd(i+n),性能指标N,得到未来的控制量。神经网络预测控制器的结构如图4所示[3]。
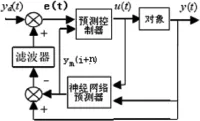
图4 神经网络预测控制器结构图
4.主要算法
(1)设定初始条件,包括初始叠加步数n、误差修正系数qn,控制修正系数rn,标准输入轨迹常数T0,采样周期T,最大叠加步数N,神经网络输入设定值g等;
(2)以被控系统的输入信号和系统输出信号作为神经网络的练习标本,并应用MGA练习方法,以此获得的神经网络作为非线性预测模型;
(3)获取将来期望的输出数据列yd(i+n|i);
(4)采用已获得的非线性预测模型产生预测输出值ym(k+j|k),并以前一时刻的误差为基础,补偿和校正在下一时刻可能出现的新的预测误差y(i+n|i),而y(i+n|i)可按下列公式计算得到:

(5)计算未来时刻期望值的误差:e(i+n)=yd(i+n)-y(i+n|i);
(6)通过对性能指标N和e(i)极小化,可得最优控制序列u(i+ n);
(7)将控制量u(i)输入系统,返回(3)进行循环。
三、神经网络预测控制在污水处理中的应用
1.控制参数的确定
在活性污泥法处理系统中,由于参与的物理量较多,因此需要控制的变量也较多,主要有曝气池中所送入的风量(即曝气量)的大小,由二沉池回送给曝气池的回流污泥比和二沉池排放的剩余污泥量等,要妥善合理地解决这些问题,就必须要找到一个既能在线监测,又能反映污水处理进程的控制参数。经查找大量的文献资料表明[5-6]:溶解氧(DO)浓度的变化规律能够有效反映有机微生物化解、脱磷除氮的反应进程,因此以溶解氧(DO)浓度的变化作为污水处理的控制参数是合理的。在实际操作中主要是通过调节鼓风机的转速来控制进入到曝气池的空气量的大小,以此来调节溶解氧(DO)的浓度。原理框图如图5所示。

图5 DO浓度控制结构图
本设计中DO浓度的设定值g=9.3mg/L,误差修正系数qn= 0.85,控制修正系数rn=0.45,初始迭代步数n=0,最大叠加步数N= 15,参考轨迹时间常数T0=4.5s,系统采样周期T=2s。
2.神经网络预测控制的实现
神经网络预测控制器由AT89C52单片机、A/D和D/A变换器等组成。其硬件结构如图6所示。
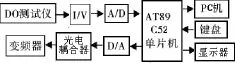
图6 神经网络预测控制硬件结构图
首先将生化池中的DO值通过DO测试仪检测,再通过电流/电压转换器变换,并经摸/数转换器将模拟量转换成数字量后输入单片机,在单片机中将输入数据送入神经网络进行处理后,将其结果经数/模转化器转换后,由光电耦合器进行隔离后,控制变频器的输出频率,进而控制鼓风机的转速。系统中还设置了上位机(PC机),其目的主要是监控下位机(单片机)的运行状况、控制效果、储存、打印数据等。图7为污水变化时(可通过污水阀开度的变化)的控制结果。从溶解氧(DO)浓度变化曲线可见,当系统的输入量发生缓慢的的非线性变化时,采用神经网络预测控制后,可使被控量变化较小,比较稳定,说明该系统抗干扰能力较强,控制精度较高。

图7 污水变化时神经网络控制结果
四、结论
将神经网络预测控制应用于污水处理这种慢时变非线性系统中,并通过单片机控制变频器改变风机的转速,以满足曝气池对氧气的需要,只要参数设置适当,就可以获得满意的效果;在处理的水质达到国家标准的前提下,该控制方法与传统的控制方法相比不但控制效果好,而且还可以节约大约15%电量,并减少了运行费用。
[1]陈金红,白瑞祥.模糊控制在工业污水处理过程中的应用[J].微计算机应用,2009,30(4):58-61
[2]曾环木.城镇污水采用活性污泥法除磷脱氮工艺探讨[J].广东化工,2009,36(3):61-64
[3]舒迪前.预测控制系统及其应用[M].北京:机械工业出版社,1996
[4]谢生钢,周立芳,赵麟菱.污水处理过程的多目标多模型预测控制方法研究[J].化工自动化及仪表,2008,35(1):24-27
[5]李伟民,江映翔,尹大强,王连生.微生物选育技术在废水生物处理中的应用进展[J].环境污染治理技术与设备,2001,2(4):49-52
[6]刘载文,许继平,杨斌,侯朝桢,程志强.序批式活性污泥法污水处理系统溶解氧优化控制方法[J].计算机与应用化学,2007,24(2):231-234
刘玉章(1959-),男,河北省石家庄人,高级讲师,主要从事电子技术、电气自动控制的教学和科研工作。
