基于SMOS卫星数据的海表面盐度模型
2016-10-25王成杰
赵 红,王成杰
(中国海洋大学 数学科学学院,山东 青岛 266100)
基于SMOS卫星数据的海表面盐度模型
赵 红,王成杰
(中国海洋大学 数学科学学院,山东青岛266100)
海表面盐度是研究海洋对全球气候影响以及大洋环流的重要参量之一,而卫星遥感技术是获取海表面盐度数据的最有效方法。目前,L波段的SMOS和Aquarius/SAC-D遥感卫星正在用于探测海表面盐度,并根据卫星观测数据和物理机制反演出海表面盐度的产品。但在某些近陆地区域,由于淡水流入及陆地射频(RFI)等因素影响,卫星反演盐度的产品精度较低。文中利用“东方红2号”科学考察船的实测数据、SMOS卫星数据,首次针对中国南海海域提出了用贝叶斯网络模型计算海表面盐度,并用验证数据集(实测Argo盐度)对模型进行适应性评估。经过计算,模型误差和验证误差分别为0.47 psu和0.45 psu,而相应的SMOS Level 2产品的精度分别为1.90 psu和1.82 psu。此模型为海表面盐度的计算提供了一个新方法。
海表面盐度;SMOS卫星;贝叶斯网络;统计模型
极端的气候变化对人类活动乃至生存环境带来了巨大的挑战,科学家们正在通过不懈的努力来预知并缓和这种气候变化。通过不断的研究,人们发现全球水循环在缓和气候变化上起到了重要的作用。而全球水循环中的一个重要的参量就是海表面盐度,它的时空变化和分布规律对了解全球海水状况以及海洋在海-气这一复杂体系中的作用有着重要意义。同时,许多学科如气象学、生态学、水文学和渔业等领域也都在关注海表面盐度的获取和进一步研究。
全球海洋如此广阔,如何对海洋进行有效的探测与研究呢?目前为止,卫星遥感技术是最有效的技术来源之一,而微波遥感由于其可穿透云层且昼夜可行,能够满足人们全天时、天候对海洋监测的需求。目前在海表面温度(SST)、风速等海洋参数的获取上广泛采用了微波辐射计,其提供的大量数据可以用于全球气候分析和数值预报,在大尺度、连续快速、全球测量能力等方面具有明显优势。从空间探测海洋盐度的计划始于1998年,目前有两颗卫星在执行任务。一颗是由西班牙、法国和欧洲空间航天局共同研制的 SMOS(Soil Moisture and Ocean Salinity)卫星,主要任务是测量海洋盐度和土壤的湿度。该卫星于2009年11月发射升空,在运转期间,将提供分辨率为200 km×200 km的10~30 d平均的全球大洋盐度数据,精度预计达到0.1 psu[1-3];另一颗是美国和阿根廷联合开发的Aquarius/SACD卫星,包含用来测量海水盐度的L波段辐射计和测量海洋表面粗糙度的L波段散射计两个有效载荷。Aquarius/SAC-D卫星计划经过月平均和150 km×150 km的空间平均后达到0.2 psu的精度。
自卫星发射以来,国外一些学者针对全球海域对卫星数据进行大尺度评估[4-6],如法国海洋开发研究所Coriolis中心设计开发了基于最优插值技术的ISAS(In Situ analysis system)温盐分析系统[7-8];美国Scripps海洋所构建了气候态温盐分布场[9];日本气象局首次实现了全球温盐图的常规化制作[10]。另外,英国气象局[11]、印度国家海洋信息中心[12]等也分别研制了各自的卫星遥感产品。Rannala B,Yang Z[13]利用OI SST为模板变量,通过混合算法得到SMOS海表盐度产品。目前,利用现有的反演算法得到的全球海表面盐度卫星遥感产品如图1,该图是2015年2月22日-26日5天平均的海表面盐度空间分布图,盐度的变化范围为30~40 psu。图中白色区域是没有得到有效的盐度产品的海域。

图1 2015年2月22-26日5 d平均海表面盐度SSS3分布图
利用卫星遥感数据来反演海表面盐度的科学研究最早见于光学遥感,最早可追溯到1982年Khorram的工作[14]。Khorram基于实测的盐度数据和Landsat多光谱扫描仪数据(MSS),利用多元线性回归模型,建立了旧金山湾三角洲区域的盐度反演算法。很多学者在Khorram的工作基础上,相继开展了基于陆地卫星Landsat或SPOT数据的盐度遥感反演工作[15-17],其中Wang基于多元线性回归的统计方法在美国墨西哥湾海岸大型河口湖利用卫星遥感来探测湖面的盐度。
由于受到陆地射频(RFI)、海表温度(SST)以及强风场等因素的严重影响,卫星遥感盐度反演模型和算法不适用于中国近岸海域,特别是南海海域(如图1中黑框内的区域)。基于卫星遥感数据建立适用于中国南海海域海表面盐度的反演模型是目前我国海洋建设过程中需要迫切解决的问题。本文根据“东方红2号”科学考察船的实测数据,采用贝叶斯网络方法对SMOS卫星的Level 2产品进行进一步的修正,得到了精度更高的海表面盐度产品。
1 数据来源和分析
宽阔大洋海域受到淡水流入及陆地射频的影响较小,因此SMOS卫星和Aquarius/SAC-D卫星在此类海域的预测精度较高。但是在一些近陆地海域,两颗卫星的产品精度却不尽如人意。本文主要考虑中国南海海域(4°N~25°N,105°E~125°E),通过贝叶斯网络统计模型来建立更加精确的海表面盐度的反演算法。
1.1实测数据集
本文采用的实测数据是“东方红2号”科学考察船在2012年4月1日到6月15日南海海域巡航期间所采集到的浮标盐度数据。“东方红2号”是中国海洋大学用于综合海洋巡航调查的科考船,此次巡航共放置了46个停泊浮标(图2),获取了包括盐度、温度、风速等多个海洋参数。所有浮标的盐度数据经过去噪音、天平均等处理后,共得到了盐度的实测数据(in-situ SSS)1 348个。

图2 “东方红2号”科学考察船在中国南海海域放置的停泊浮标的位置
1.2Argo数据集
Argo(Array for Real-time Geostrophic 0ceanography)俗称“Argo全球海洋观测网”,是迄今为止人类历史上第一个提供全球海洋次表层信息的观测系统。Argo浮标可以在海洋中自主浮沉,随洋流漂流,同时自主定位和测量多种海洋数据,包括海水盐度、温度等。Argo剖面浮标观测资料以其水平分布广、垂直深度深、数据量大、精度高的优势,逐渐成为海洋观测信息的重要来源,有助于更准确、更全面地了解全球气候的变化。
1.3SMOS卫星数据集
SMOS卫星是欧洲空间航天局(European Space Agency,ESA)“地球探索者机遇”项目中的第二颗卫星。SMOS卫星主要产品是Level 2级数据产品,其反演算法是通过最小化迭代函数来定义[18]。这种方法不可避免地会存在反演误差,误差源包括亮温观测不精确、近陆污染和无线电频率干扰等;太阳/大气等外源误差,海水介电常数模型不精确、依赖于海表状态的粗糙度模型不精确等环节可能产生的误差。在SMOS卫星发射之后,许多科学家致力于共同努力来移除、削弱或修正这些误差,并在宽阔海域内得到了较精确的结果。但是在某些海域,尤其是近陆地区域,受到人为噪音等干扰,常规的RFI检测方法并不奏效,因此SMOS Level 2盐度产品的误差还比较大。本文主要针对这类区域,在SMOS Level 2数据的基础上建立一种不依赖于物理机制的统计预测方法,得到更加有效的海表面盐度模型。
1.4数据匹配
在模型的建立过程中,采用的盐度实测数据是由“东方红2号”科学考察船采集处理后的数据,亮温数据是SMOS卫星提供的Level 2数据,即入射角(L2a angle)为42.5°所对应的海表水平的亮温(TB)。其他的海洋影响变量由SMOS辅助数据提供。根据SMOS卫星盐度反演的物理机制和前人的研究成果,选取了6个相关的海洋物理参量,包括水平极化亮温(TBH)、垂直极化亮温(TBV)、海表面温度(SST)、有效波高(SWH)、降雨率(RR)和风速(WS)。对于SMOS卫星的Level 2数据与辅助数据,首先通过ESA的Earth Observation On-line Catalogue and Ording Services订购,利用Beam软件读取出来网格化数据点,再按照相同时间相同网格进行匹配,得到包括3种盐度产品(SSS1,SSS2,SSS3)和6个影响变量(TBH,TBV,SST,SWH,RR和WS)的有效数据2 648 082组(4°N~25°N,105°E~125°E区域,2012年4月-6月)。
卫星数据与现场实测的数据之间会存在时空上的差异,因此在数据匹配时要依据合理的匹配原则。对于每一个现场观测的盐度数据,按照该数据的观测时间和浮标经纬度与同步卫星的数据进行匹配。Busalacchi等[19]提出的匹配原则是时间间隔为1 d,空间匹配半径为1°,即在时空上都采用最近点(closet point of approach,CPA)原则与实测数据进行匹配。为了更加精确,这里采取的匹配原则是最大时间间隔为12 h,最大空间匹配半径为0.5°。对于每一个实测的盐度数据,提取匹配半径内所有同步的SMOS卫星匹配数据组,取平均值后将两者进行匹配,得到匹配数据106组。
此数据即采用的训练数据集,是以后建立海表面盐度反演模型的数据基础。此训练数据集中每一组数据都包含10个变量,分别是目标变量(实测海表面盐度,即in-situ SSS),影响变量(亮温TBH、亮温TBV、海表面温度SST、有效波高SWH、降雨率RR和风速WS)和对照变量(SMOS SSS1,SSS2, SSS3)。
1.5数据分析
首先,对SMOS Level 2的盐度数据产品进行误差分析。对于106组匹配的数据,分析计算了实测变量(in-situ SSS)和对照变量(SMOS SSS1,SSS2,SSS3)的误差,SMOS 3种盐度数据的均方根误差(RMSE)分别是1.90 psu,1.93 psu和1.91 psu(图3);平均绝对误差是1.46psu,1.49psu和1.47psu。

图3 106组时空匹配的实测数据和SMOS卫星产品分布图

图4 卫星数据SSS1相对于实测数据的误差分布图(106组)
可以看到,SMOS Level 2盐度产品在此区域是不够精确的。SMOS的3种盐度产品的数据都比较接近,为了简单将SMOS SSS1作为SMOS Level 2的盐度产品来进行分析和比较。图4是卫星数据SMOS SSS1的误差分布图,变化范围在-6.32~3.98 psu之间。
同时也将Aquarius/SAC-D的Level 3盐度数据和46个站位点的盐度数据按照上面的方式进行时空匹配,得到349个点对。两种产品的盐度分布图和误差分布图见图5。Aquarius/SAC-D盐度产品略高于实测盐度,均方根误差(RMSE)为0.88 psu,平均绝对误差(MAE)为0.78 psu。可以看到,Aquarius/SAC-D产品的误差也较大,因此需要建立新的反演模型。
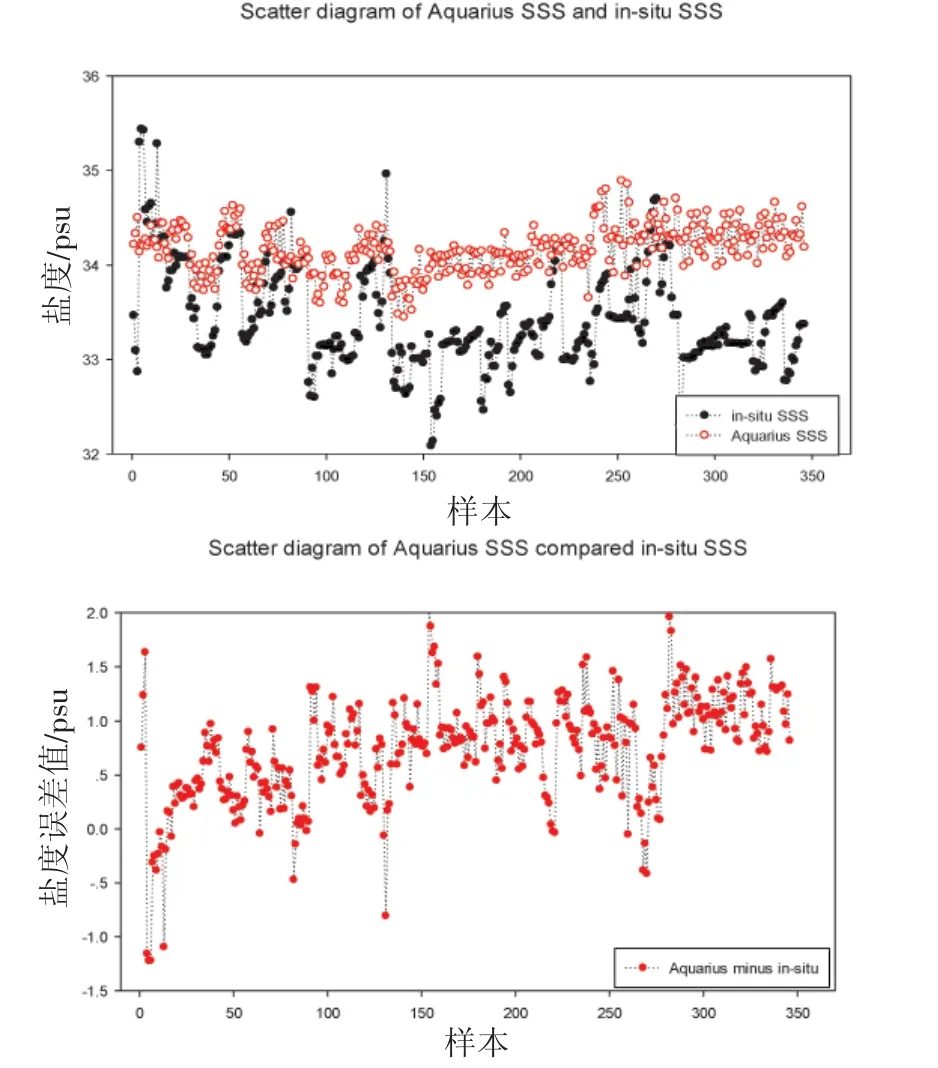
图5 Aquarius/SAC-D盐度数据和实测盐度数据分布图(上)及误差分布图(下)
2 统计模型
本节利用贝叶斯网络模型对海表面盐度等参数建立统计模型,并利用实测Argo盐度数据对模型进行评估和检验。
2.1贝叶斯网络
贝叶斯网络(Bayesian Network,BN)由网络拓扑结构和条件概率分布族两部分组成。拓扑结构是有向无环图(directed acyclic graph,DAG),节点代表变量,节点间的有向边代表变量间的条件依赖关系。每一个节点都附有一个条件概率分布,即贝叶斯网络的参数。根据独立性假设,联合概率分布可以展开成以下形式:

式中:π(Xi)表示变量Xi的父节点。
连续型贝叶斯网络中的所有节点变量都是连续型变量,通常假设其参数为多元正态模型。
Kenley C R,Schachter R,Castilo E等[20-22]分别对连续型贝叶斯网络进行研究,式(1)中的条件分布可以表示为如下形式:

式中:μi是Xi的均值;σ2i是Xi的条件方差;bij是在给定Xi父节点π(Xi)下用来衡量Xj对Xi影响的回归系数,即变量Xi的预测方程为:

当对参数{μ1,μ2,…,μn},和进行估计后就可以确定预测方程[23]。当模型结构已知时,贝叶斯网络学习简称为参数学习,包括极大似然估计方法[24]和贝叶斯估计方法[25];而对模型结构进行推断时,称为结构学习,通常包括即基于约束(Constraint based,CB)的学习算法[26],基于评分(Score-based,SB)的学习算法[27]和混合学习算法[28],其中比较常用的是基于评分算法。
2.2模型结果分析
利用1.4节得到的训练数据集,对7个变量SSS,TBH,TBV,SST,SWH,WS和RR通过爬山法[29]进行结构学习和参数学习。为了避免局部最优化和结构学习过拟合,以10幅随机图作为搜索算法的起点,设置每一个节点的最大父节点个数为4个,选择BIC作为结构学习的评分函数。最后选择评分最低的结构(最优结构)作为理想结构进行下一步的参数学习,该结构变量间的关系如图6。

图6 贝叶斯网络结构图
从得到的网络结构图中,可以得到这7个相关变量之间的影响关系。直接影响海表面盐度SSS的因素是海表面温度SST、水平极化亮温TBH和垂直极化亮温TBV以及降雨率RR。
由于对变量数据并没有可靠的先验认识,所以在进行参数学习时并不加先验,即采用极大似然估计的方法来进行参数估计,得到的条件分布集合为:
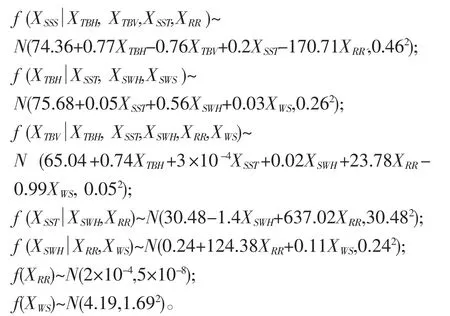
当对海表面盐度变量进行推断时,由前面的条件分布集合和公式(3),可以得到如下预测公式:

利用盐度的预测公式(4)可以得到海表面盐度的拟合值。对于训练数据集,模型拟合的盐度值和真实盐度值的散点图见图7,可以看到数据点对比较接近于直线y=x。经过计算,模型的均方根误差RMSE和平均绝对误差MAE分别是0.47 psu和0.34 psu,而SMOS SSS1产品的精度分别为1.90 psu和1.46 psu,误差分布图见图7。同时绘制了模型产品和SMOS SSS1的误差百分比分布图(图8),其中99%的模型误差都集中在-1~1 psu之间,而SMOS SSS1的误差只有44%,在-1~1 psu之间。

图7 模型拟合的盐度值和真实盐度值的散点图及误差分布图

图8 模型拟合盐度以及SMOS盐度的误差分布图
2.3模型验证
为了对模型进行适应性验证,选取南海海域2013年4月-6月进行对比研究。订购下载并用Beam软件读取数据,按照1.4提出的原则对数据进行时空匹配,可以得到SMOS卫星3种Level 2盐度产品(SSS1,SSS2,SSS3)和6个影响变量(TBH,TBV,SST,SWH,RR,WS)。2013年4月、5月和6月南海海域的有效网格点数据各为11 577 985,11 987 166和11 367 069组。通过贝叶斯网络模型计算可以得到网格点的海表面盐度,进一步平均后可以得到空间分辨率为1°×1°的单天和月平均数据产品。绘制海表面盐度的月平均产品空间分布图(图9),盐度数据的变化范围为32.5~35 psu。

图9 2013年4月、5月和6月的月平均盐度产品图
2013年4月至6月南海海域共有374个有效的Argo浮标(图10),按照1°×1°的单天平均后和我们的日平均产品以及SMOS Level 2日平均产品进行时空匹配,得到286组匹配数据。图11(a)是匹配的Argo数据、模型产品和SMOS Level 2产品的分布图,可以看到模型产品更接近于实测数据(Argo)。图11(b)是模型产品和SMOS Level 2产品的误差分布图。经过计算,均方根误差RMSE分别为0.45 psu和1.82 psu,进一步说明该产品相对于SMOS Level 2产品具有更高的精度。
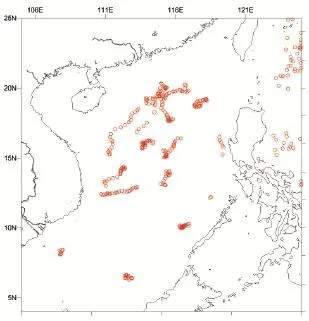
图10 2013年4月到6月南海区域有效的Argo数据的标记地理位置

图11 (a)匹配段Argo盐度、模型产品和SMOS Level 2产品的分布图,(b)匹配的模型产品和SMOS Level 2产品的误差分布图
3 总结
海表面盐度是研究大洋环流和海洋对全球气候影响的重要因素。本文通过建立贝叶斯网络模型,充分利用卫星遥感数据得到了海表面盐度的预测公式,而且模型精度较高(点对点精度为0.47 psu)。同时,将模型日平均产品与实测Argo数据进行比较,误差RMSE为0.45 psu,而SMOS卫星Level 2日平均产品的误差为1.82 psu。此结果说明我们得到的海表面盐度预测模型可以对SMOS卫星产品进行进一步修正,且具有较好的泛化能力。
在未来的研究中,将进一步尝试用统计分析的其他方法,如主成分回归或非线性回归方法来建立反演模型。进一步考虑陆地射频、淡水流入等数据对模型的影响,建立适应性更强的模型。
[1]Kerr Y H,Waldteufel P,Wigneron J P,et al.Soil Moisture Retrieval from Space:The Soil Moisture and Ocean Salinity(SMOS)Mission[J].Geoscience and Remote Sensing,IEEE Transactions on,2001,39(8):1729-1735.
[2]Zine S,Boutin J,Waldteufel P,et al.Issues about Retrieving Sea Surface Salinity in Coastal Areas from SMOS Data[J].Geoscience and Remote Sensing,2007,45(7):2061-2072.
[3]Talone M.Contribution to the Improvement of the Soil Moisture and Ocean Salinity(SMOS)Mission Sea Surface Salinity Retrieval Algorithm[D].Universitat Politecnica de Catalunya,2010.
[4]Murtugudde R,Busalacchi A J.SalinityEffects in a Tropical Ocean Model[J].Journal ofGeophysical Research:Oceans(1978-2012),1998,103(C2):3283-3300.
[5]王新新,杨建洪,赵冬至,等.Aquarius/SAC-D卫星盐度数据在中国南海的准确度评估[J].热带海洋学报,2013(5):23-28.
[6]Sen A,CarusoD,DurhamD,et al.Launch and On-Orbit Checkout ofAquarius/SAC-D Observatory:An International Remote Sensing Satellite Mission MeasuringSea Surface Salinity[J].Sensors,Systems,and Next-Generation Satellites XV,2011,8176(3):6012-6015.
[7]Gaillard F,Morin P,Reverdin G.Contribution to the ICES Working Group on Oceanic Hydrography National Report[R].National Report,2013:1-19.
[8]Gaillard F,Charraudeau R.ISAS-V4.1b:Description ofthe Method and User Manual[M].Rapport LPO,2008:08-03.
[9]Roemmich D,Gilson J.The 2004-2008 Mean and Annual Cycle of Temperature,Salinity,and Steric Height in the Global Ocean from the ArgoProgram[J].Progress in Oceanography,2009,82(2):81-100.
[10]Hosoda S,Ohira T,Nakamura T.A Monthly Mean Dataset of Global Oceanic Temperature and Salinity Derived from Argo Float Observations[J].JAMSTECReport ofResearch and Development,2008,8:47-59.
[11]Martin MJ,Hines A,Bell MJ.Data Assimilation in the FOAMOperational Short-Range Ocean Forecasting System:A Description of the Scheme and Its Impact[J].QuarterlyJournal ofthe Royal Meteorological Society,2007,133(625):981-995.
[12]Udaya Bhaskar T V S,Ravichandran M,Devender R.An Operational Objective Analysis System at INCOIS for Generation of Argo Value Added Products[J].2007,1:48.
[13]Umbert M,Hoareau N,Turiel A,et al.NewBlendingAlgorithmtoSynergize Ocean Variables:The Case ofSMOS Sea Surface Salinity Maps[J].Remote SensingofEnvironment,2014,146(5):172-187.
[14]KhorramS.Remote SensingofSalinityin the San FranciscoBayDelta[J].Remote SensingofEnvironment,1982,12(1):15-22.
[15]Baban S MJ.Environmental Monitoring of Estuaries;Estimating and Mapping Various Environmental Indicators in Breydon Water Estuary,U.K.,UsingLandsat TMImagery[J].Estuarine,Coastal and ShelfScience,1997,44(5):589-598.
[16]LaveryP,Pattiaratchi C,Wyllie A,et al.Water QualityMonitoringin Estuarine Waters Usingthe Landsat Thematic Mapper[J].Remote SensingofEnvironment,1993,46(3):268-280.
[17]Wang F,Xu Y J.Development and Application of a Remote Sensing-Based Salinity Prediction Model for a Large Estuarine Lake in the USGulfofMexicoCoast[J].Journal ofHydrology,2008,360(1):184-194.
[18]Gabarró Prats C.StudyofSalinityRetrieval Errors for the SMOSMission[D].Barcelona,2004.
[19]Busalacchi A J,Hackert E C,Alory G,et al.Spatio-Temporal Variability and Error Structure of SSS in the Tropics[C]//AGU Fall MeetingAbstracts,2011,1:1627.
[20]KenleyCR.Influence DiagramModels with Continuous Variables[D].US,CA:Stanford University,1986.
[21]Shachter R D,KenleyCR.Gaussian Influence Diagrams[J].Management Science,1989,35(5):527-550.
[22]Castillo E,Gutierrez J M,Hadi A S.Expert Systems and Probabilistic Network Models[J].Computational Statistics and Data Analysis,1997,2(25):244-245.
[23]Heckerman D,Geiger D,Chickering D M.Learning Bayesian Networks:The Combination of Knowledge and Statistical Data[J].Machine learning,1995,20(3):197-243.
[24]Le Cam L.Maximum Likelihood:An Introduction[J].International Statistical Review/Revue Internationale de Statistique,1990: 153-171.
[25]HaffLR.Empirical Bayes Estimation ofthe Multivariate Normal Covariance Matrix[J].The Annals ofStatistics,1980:586-597.
[26]Cooper G F.A Simple Constraint-Based Algorithm for Efficiently Mining Observational Databases for Causal Relationships[J].Data Miningand Knowledge Discovery,1997,1(2):203-224.
[27]Dobeck G J.A Probabilistic Model for Score-Based Algorithm Fusion[C]//OCEANS,2005.Proceedings of MTS/IEEE.2005,3: 2429-2434.
[28]Wong M L,Leung K S.An Efficient Data Mining Method for Learning Bayesian Networks Using an Evolutionary Algorithm-Based Hybrid Approach[J].EvolutionaryComputation,IEEE Transactions on,2004,8(4):378-404.
[29]Scutari M.LearningBayesian Networks with the Bnlearn R Package[J].Journal ofStatistical Software,2010,35(3):1-22.
Study on the Sea Surface Salinity Model Based on SMOS Data
ZHAO Hong,WANG Cheng-jie
School of Mathematical Sciences,Ocean University of China,Qingdao 266100,Shandong Province,China
Sea surface salinity(SSS)is a key parameter for studying the effects of the ocean on global climate and ocean circulation,and satellite remote sensing detection functions as the most effective means to obtain SSS data.Currently,L-band SMOS and Aquarius/SAC-D satellites are being used to detect SSS based on observing data and the physical mechanism.However,in some near-shore areas,due to the inflow of freshwater and terrestrial radio frequency interference,the precision of salinity satellite products is relatively low.This paper uses the measured data from the"Dong Fang Hong 2"scientific expedition ship and SMOS data to predict SSS by the Bayesian network model for the first time in the South China Sea,and assesses the model with validation data sets(measured Argo salinity).Analysis results show that the model error and validation error is 0.47 psu and 0.45 psu,respectively,while the precision of SMOS Level 2 products is 1.90 psu and 1.82 psu,respectively.This model provides a new method to predict SSS.
sea surface salinity(SSS);SMOS satellite;Bayesian network;statistical model
10.3969/j.issn.1003-2029.2016.01.002
P731.1;TP79
A
1003-2029(2016)01-0015-08
2015-09-08
中央高校基本科研业务费资助项目(201362031);山东省自然科学基金资助项目(ZR2015AQ004)
赵红(1981-),女,硕士,讲师,主要从事贝叶斯网络模型、卫星遥感与应用研究。E-mail:zhaohong@ouc.edu.cn
