站台安全门电机控制器的设计
2016-10-24廖洪运李志阔唐一非
廖洪运,李志阔,刘 鹏,唐一非
(1. 天津市地下铁道集团有限公司,天津 300000;2. 同方泰德国际科技(北京)有限公司,北京 100083;3. 同方股份有限公司,北京 100083)
站台安全门电机控制器的设计
廖洪运1,李志阔2,刘 鹏3,唐一非3
(1. 天津市地下铁道集团有限公司,天津 300000;2. 同方泰德国际科技(北京)有限公司,北京 100083;3. 同方股份有限公司,北京 100083)
文章给出了应用于有轨电车站台安全门的直流电机控制器的控制方案,重点描述了系统硬件架构和软件控制流程,并对驱动控制算法进行了探讨。硬件上以 Microchip 的 16 位处理器为核心控制单元,控制部分与驱动部分完全隔离,提高系统的抗干扰性。软件上采用双闭环控制方法,速度调节器与电流调节器采用增量式数字 PI 算法。实验表明该电机控制器能够满足现场应用的需求。
有轨电车;站台安全门;直流电机;控制器
近年来,有轨电车在我国发展迅速。2014 年,南京河西有轨电车 1 号线投入运营,2015 年该线站台上改造安装了安全门系统。目前的安全门电机控制器虽能实现基本功能,但有响应速度慢、控制精度低、运行不够平稳等缺点。本文在原有直流电机控制器的基础上,从软、硬件方面进行了优化,自主研发了应用于有轨电车站台安全门的电机控制器系统,给出了硬件框图以及软件控制方案。
1 电机控制器概述
站台安全门系统是一种安装于候车站台上的防护性装置,其核心控制部件为电机控制器。站台安全门的控制系统主要包括电机控制器、安全门控制盘、红外控制器、站台遥控器、就地控制盒等设备。其中,电机控制器作为控制系统的核心部分,直接决定了安全门运行的平稳性和安全性。
电机控制器主要实现的功能有以下几点:
(1)响应安全门控制盘或就地控制盒发过来的控制命令,驱动电机进行开关门操作。
(2)门体在开关门运动过程中,以设定的速度曲线运动,速度曲线参数可调。在关门过程中,每扇滑动门最大动能不应超过 10 J,最后 100 mm 行程的动能不应超过 1 J。
(3)关门过程中具有防夹保护功能。
(4)具有故障显示和报警功能,并能够通过总线发送到安全门控制盘。
2 电机控制器的硬件设计
电机控制器以M i c r o c h i p公司的16位处理器dsPIC30F6010A 为核心控制单元。该处理器集成了电机控制PWM模块、正交编码器模块 QEI 以及 AD 转换接口等,为电机驱动控制的开发提供了方便。另外,该处理器还具有 CAN 通讯接口和 UART 通讯接口。电机控制器的硬件框图如图 1 所示。
为提高整个系统的抗干扰性,电机控制器的控制部分与驱动部分采用光耦完全隔离。处理器通过 IO 口接收控制命令,经过分析计算后,输出具有一定占空比的4 路 PWM 波。PWM 波通过 H 桥驱动电路驱动电机以一定的速度和方向运转。同时,光电编码器检测电机的运转速度,以脉冲信号的形式反馈给处理器的 QEI 模块,处理器根据此脉冲信号计算当前电机的运行速度,参与速度环的运算。另外,电流霍尔传感器检测流过电机的电流,进入处理器的 AD 转化引脚,转化成数字量参与电流环运算。
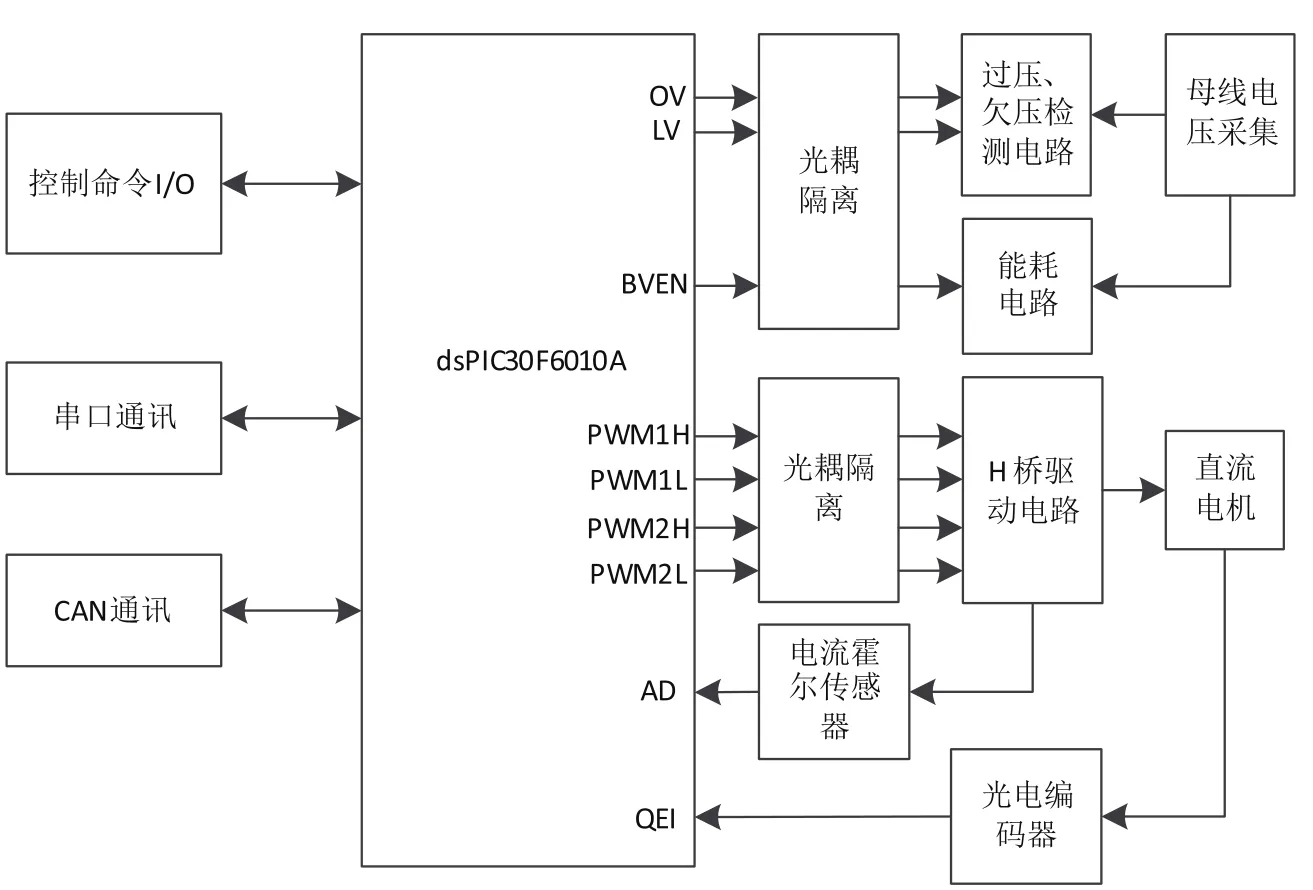
图 1 电机控制器硬件框图
电机控制器实时采集母线电压值,并将该值与设定的最高母线电压和最低母线电压进行比较。一旦电压超过极限范围,硬件电路将产生相应的电平信号。处理器根据该信号,进行故障处理或报警。
当电机在减速制动过程中,电机处于发电状态。电能通过电机回馈至直流回路,导致母线电压瞬间升高。该电压尖峰对于电源模块会造成很大的冲击甚至损坏,因此系统中设计了耗能电路。耗能电路的原理是当电机处于减速制动状态时,如果母线电压升高一定值(在此设定为 3 V),则将一耗能电阻接入电源母线两端,消耗电机制动过程中回馈的电能。待母线电压回降到正常范围内后,耗能电阻自动切断。整个耗能电路采用全硬件控制,响应速度快,能够很好抑制电机刹车过程中的回馈电压冲击。
电机控制器还具有串行通信接口和 CAN 通信接口,串行通信接口主要用于上位机对电机控制器进行参数下载和数据示波显示。由于整个站台采用 CAN 总线作为通讯控制局域网,因此每个电机控制器通过 CAN 通讯接口连接到总线上,使安全门控制盘能够进行集中控制和监测。
3 电机控制器的控制算法和软件设计
3.1控制算法
为保证安全门在运动过程中具有良好的平稳性,同时按照设定的速度曲线精确运行。系统采用了双闭环控制,即外环速度环、内环电流环。控制框图如图 2所示。

图 2 直流电机双闭环控制框图
速度调节器和电流调节器采用增量式数字 PI 算法,算法公式为:

式(1)中,uk-1为第 k-1 次采样时刻的输出值;ek-1为第 k-1 次采样时刻输入的偏差值;K1为比例系数;K2为积分系数。
实际运行中,在电机启动、停车或遇阻处理过程中,短时间内系统会产生很大的偏差,这会使 PI 运算的积分积累很大,引起输出的控制量增大,这一控制很容易超出执行机构的极限值,引起强烈的积分饱和效应,造成系统振荡、调节时间延长等不利结果。为了防止积分饱和带来的不利影响,在速度环和电流环中采用了积分饱和限幅的控制算法。
另外,开关门的运动过程都要经历加速段、高速段、减速段、慢速段 4 个阶段,给定的速度曲线一般为梯形曲线,如图3所示。梯形曲线的加速度具有突变性,速度变化不够平滑,因此梯形曲线对电机具有一定的冲击性。为了减轻对电机的柔性冲击,提高电机运行的平稳性,将给定的梯形速度曲线首先经过滤波计算,变成 S 型速度曲线后,再进入速度环控制运算,如图 4 所示。

图 3 梯形速度曲线

图 4 S型速度曲线
采用的滤波计算公式如下所示:

式(2)中,v 为本次运算的速度;v' 为上次运算的速度;r 为上次运算所得的余数;C 为滤波时常数,一般取整数。
3.2软件程序设计
软件中采用定时器 T1 定时 1 ms 作为系统时基。在T1 中断程序中,分时间片循环调用各个处理程序。
低优先级处理程序每 100 ms 执行 1 次,主要完成的工作有:更新系统的运行状态和故障信息;处理串口数据,实现与上位机的通讯;处理 CAN 总线数据,将状态信息和故障信息发送到中央控制盘。低优先级处理程序的流程框图如图 5 所示。
速度环处理程序每 10 ms 执行 1 次,主要工作是:响应外部控制命令,确定电机的运转方向;根据设定的速度进行滤波计算;进行速度环运算。速度环处理程序流程框图如图 6 所示。
电流环处理程序设定在 AD 中断程序中进行。程序中设定每 16 个 PWM 进入 1 次 AD 中断,在 AD 中断程序中采样电流值并进行电流环运算。由于 PWM 频率设定为 16 kHz,因此电流环的运行周期为 1 ms。 AD 中断程序流程框图如图 7 所示。
另外,保证各处理程序的运行时间分别小于各自运行时间片的 1/3,每 1 个处理程序运行完成后即时释放CPU,使 CPU 能运行其他的空闲任务。
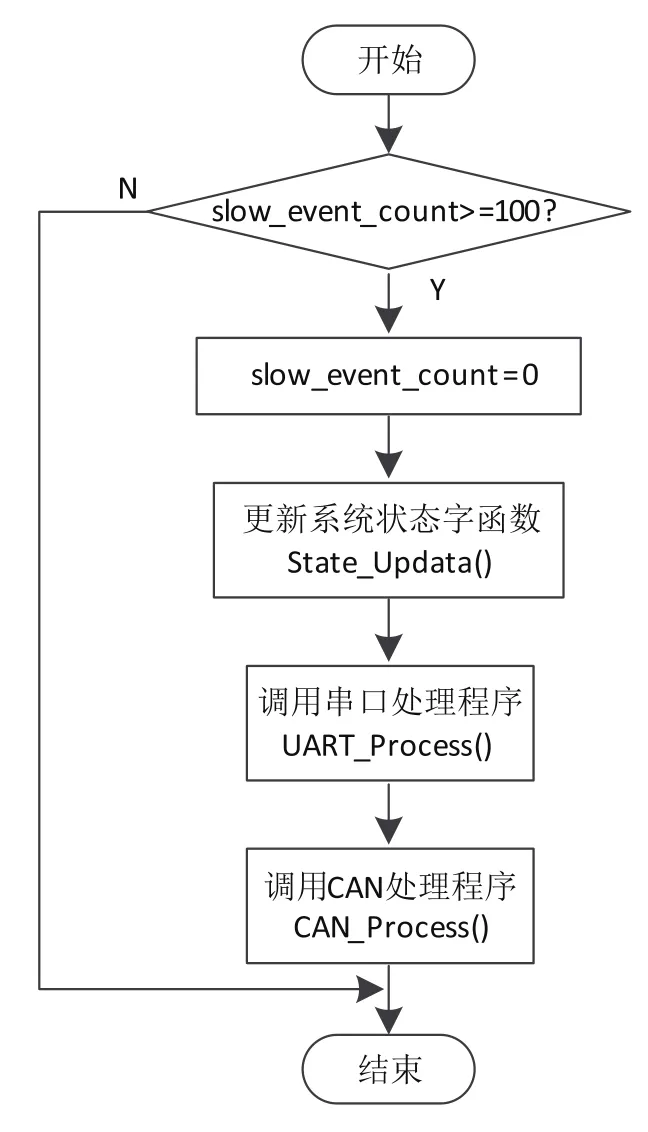
图 5 低优先级处理程序流程框图
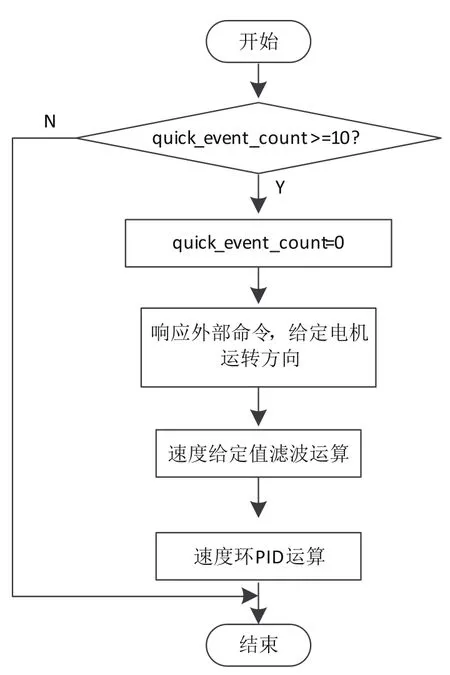
图 6 速度环处理程序流程框图

图 7 AD中断程序流程框图
4 实验验证
将电机控制器安装到有轨电车站台安全门样机上进行测试。样机参数如下:单扇样机门重 40 kg;电机额定功率 96 W,额定电压 24 V,额定电流 4 A,额定转速 3 200 rpm,编码器分辨率为 100;减速机减速比为 15 : 1;传动方式为同步带传动,带轮直径为 50 mm。为了达到每扇滑动门的动能要求,安全门运行最高速度设定为 450 mm/s,慢速爬行区速度设定为 100 mm/s。
调试过程中,通过上位机软件读取电机的实际运行速度曲线。参照速度曲线,反复调整安全门各运行阶段的 PI 参数值以及给定速度的滤波参数,使安全门在运行的 4 个阶段,速度变化平滑无冲击,此时为最佳运行状态。电机速度曲线如图 8 所示。

图 8 开关门速度曲线
5 结论
(1)提出了有轨电车站台安全门的电机控制器设计方案,并完成了在安全门样机上的测试。
(2)该电机控制器控制精度高,响应速度快,运行平稳无冲击,并具有完善的故障检测和保护功能。
(3)该电机控制器已完成了百万次开关门寿命实验,能够满足现场应用的需要。
(4)该设计方案,也对同领域的地铁站台屏蔽门、BRT 站台安全门的驱动控制具有参考意义。
[1] 郑磊,刘婷婷. 南京河西有轨电车机电系统接口管理[J]. 铁路技术创新,2013(6).
[2] 张玉华. 快速公交车站站台门系统的设置探讨[J]. 工业安全与环保,2011(37).
[3] 仇维斌,欧红香. 一种基于TMS320LF2407A的地铁屏蔽门门机控制器设计[J]. 微电机,2009(9).
[4] Using the dsPIC30F for Sensorless BLDC Control(AN901)[Z]. Microchip Corporation application. 2004.
[5] 王晓明. 电动机的DSC控制[D]. 北京:北京航空航天大学,2009.
责任编辑 孙锐娇
Design of Motor Controller for Safety Gate on Tram Platform
Liao Hongyun, Li Zhikuo, Liu Peng, et al.
This paper presents the control scheme of the DC motor controller applied to safety screen gate of tram platform, the description is focusing on the system hardware architecture and software control flow and discussion on the drive control algorithm method. On the hardware, the 16 bit processor of Microchip is the core control unit,the control part and the drive part are completely separated, and the anti-interference ability of the system is improved. Double closed loop control method is used in the software, the speed regulator and the current regulator are used in the incremental digital PI algorithm. Tests show that the motor controller can meet the requirements of the fi eld application.
tram, platform safety gate, DC motor,controller
TP273
2016-05-26
廖洪运(1976—),男,高级工程师
