基于SIFT算法在图像配准上的应用研究和实现
2016-10-21陈晓燕
陈晓燕
摘 要 图像匹配有很多的局部描述子算法,即寻找图像间的对应点和对应区域。局部特征在很多应用中都有重要的作用,比如创建全景图、增强现实技术以及计算图像的三维重建。SIFT特征包括兴趣点检测器和描述子。SIFT描述子具有非常强的稳健性。SIFT特征对应尺度、旋转和亮度都具有不变性,因此它可以用于可靠匹配。图像配准时对图像进行变换,使得变换后的图像能够在常见的坐标系中对齐。配准可以是严格配准,也可以是非严格配准,为了能够进行图像对比和更精细的图像分析,图像配准是一步非常重要的操作。本文针对SIFT (scale invariant feature transform)算法在图像配准上的应用进行研究和实现。RANSAC是“Random Sample Consensus”(随机一致性采样)的缩写。该方法是用来找到正确模型来拟合带有噪声数据的迭代方法。给定一个模型,例如电机之间的单应性矩阵,RANSAC基本的思想是,数据包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摒弃噪声点。我们经常使用该约束将很多图像缝补起来,拼成一个大的图像来创建全景图像。
【关键词】图像配准 SIFT特征 随机一致性采样
近些年来,随着科技的不斷飞速发展,图像拼接技术成为计算机图像处理、计算机视觉等领域的研究热点。图像拼接在虚拟现实、遥感技术和军事领域都有很多的应用。获取到的图像信息量逐步增大,提供了更多有效的数据支撑,不同相机拍摄到的高分辨率图像间会出现旋转、平移、光照甚至分辨率大小不同的情况,如何将两幅图像快速精确配准,成为目前研究的热点。
图像配准技术是将在同一区域但在不同传感器或不同观测角度下拍摄的两幅或多幅图像,找出其相同或重叠区域,并进行匹配对准的过程。准确的图像配准也是图像融合与拼接能够顺利完成的重要先决条件。图像配准的方法可以分为基于灰度信息的图像配准方法,基于变换域的图像配准方法和基于特征的图像配准方法三大类方法。在基于特征的图像配准方法中,1999年由Lowe提出并在2004年改进完善的SIFT算法对图像旋转、比例缩放、光照变化表现出较强的鲁棒性,并能提取出较多的特征点。
本文采用一种改进的SIFT变换,把图像SIFT算子检测到的特征点进行SIFT算子描述,通过K-D树算法进行初步匹配,然后再通过改进的随机抽取一致性算法( RANSAC)进行精确匹配,提出一种更具有稳健性的二次反向匹配。因为匹配是单向的,即我们将每个特征想另一幅图像中的所有特征进行匹配,提出改进的反向逆匹配,即从第二幅图像中的特征向第一幅图像中的特征匹配,最后我们只保留同时满足这两种匹配准则的对应。实验结果表明本算法在配准图像时具有快速性及稳健性。
1 经典SIFT算法原理
SIFT算法的尺度空间是,DOG与不同尺度的图片卷积。
特征点检测是,先进行非极大抑制,在去除低对比度的点。在通过Hessian矩阵去除边缘的点。
方向是,在正方形区域内统计梯度的幅值的直方图,找max对应的方向。可以有多个方向。
特征描述子是,16*16的采样点画风为4*4的区域,计算每个区域的采样点的梯度方向和幅值,统计成8bin直方图,共4*4*8=128维。
2 RANSAC(随机一致性采样)算法原理
在实际的应用中,为了得到仅包含高质量的匹配,我们通常使用RANSAC算法来进行基础矩阵的估算。
RANSAC算法的目的是从包含异常值的数据集中估算出给定的数学元素。基本原理是随机地选取一些数据点,并且只用它们来进行估算。选择的数据点的个数应当是可以用在进行估算的最小数。对于基础矩阵来说,8个匹配是最小数。一旦从这个随机地8个匹配中算出基础矩阵,集合中所有剩下的匹配都会和矩阵对应的极性约束进行测试。我们找到所有满足该约束的匹配,它们对应的他正非常接近极值线。这些匹配组成了这个基础矩阵的支持集合。
3 二次反向匹配法去除误匹配
本文使用一种更具有稳健性的二次反向匹配。因为匹配是单向的,即我们将每个特征想另一幅图像中的所有特征进行匹配,提出改进的反向逆匹配,即从第二幅图像中的特征向第一幅图像中的特征匹配,最后我们只保留同时满足这两种匹配准则的对应匹配点。从而保留了优质匹配。初始数据集中优质匹配的数量越大,RANSAC算法给出正确基础矩阵的概率也越高。所以我们相当于对数据集进行了优化的筛选。从而保证了后期能得到精准度高的图像特征点匹配。
4 实验结果
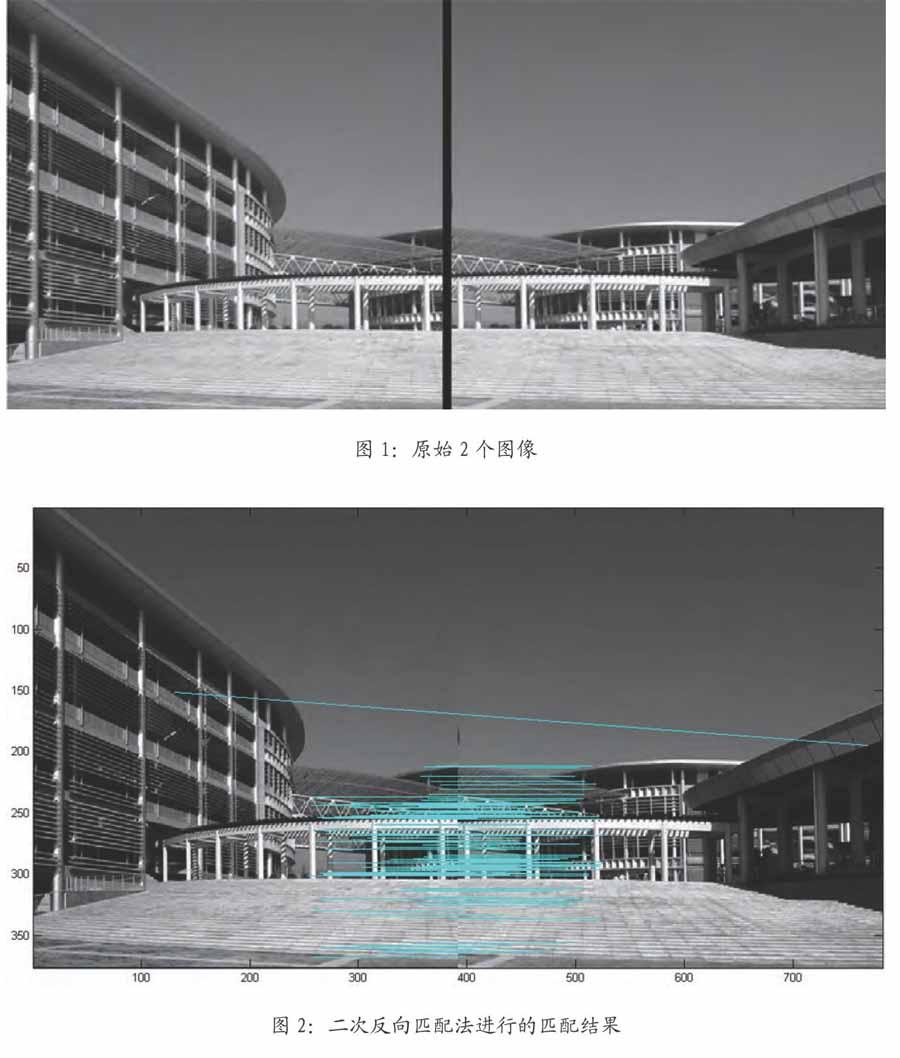
本文对特征点二次双向匹配算法进行了相关实验,选取不同的多幅图像进行了配准测试,较全面地测试了配准功能。下面以图1、图2为例进行说明,给出实验结果及分析。
5 结论
本文使用了一种二次双向匹配算法与SIFT算法相结合的配准算法,该算法可以去除重要的误匹配点,提高初始数据中的优质匹配的数量,从而提高了配准的准确率。
参考文献
[1]Lowe D G.Distinctive image features from scale-invariant key points[J]. International Journal of Computer Vision,2004,60(2):245-270.
[2]Bay H,Tuytelaars T,Gool L V.SURF speeded up robust features[A]. The Nineth European Conference on Computer Vision (ECCV)[C].Graz, Austria;Springer,2006:404-417.
[3]Kordelas G,Daras P.Robust SIFT-based feature matching using Kendall's rank correlation measure[A].Proc. ICIP[C].2009:325-328.
作者单位
华南师范大学 广东省广州市 510006