基于LPS的无人机水土保持监测数据处理与优化
2016-10-21杨恺
杨 恺
(陕西省水土保持生态环境监测中心陕西西安710004)
基于LPS的无人机水土保持监测数据处理与优化
杨恺
(陕西省水土保持生态环境监测中心陕西西安710004)
常规的LPS处理流程对外方位元素精度要求较高,且自动生成同名点匹配精度不高及人工筛选工作量大,D TM及正射影像结果精度难以掌控。本文提出的航测数据处理优化方案可有效修订PO S数据系统误差,提高匹配精度;在第一次优化基础上可减少人工筛选同名点工作量,提高整体空三解算控制点精度;对因裁剪线问题引起的图斑缺失、错位、扭曲等现象也进行了改进,提高了正射影像自动拼接效果和精度。
无人机;低空航测;水土保持监测;数据处理;LPS
1 无人机水土保持监测应用现状
无人飞行载具(Unmanned Aerial Vehicle,UAV)或称无人飞机系统(Unmanned AircraftSystem,UAS)是指由遥控或者自动驾驶技术,进行科学观测及侦查等任务的飞行载具。目前,民用无人机航测的用途被逐渐开发出来,包括农作物的航测,林业普查、水土保持监测、小范围高精度测量、搜索和救援行动、检查线路和管道、野生动物的观察等[1-3]。与传统航测相比较,具有操作成本低、运用弹性大及支援装备少等特性。
无人机遥感作为遥感科技的重要组成部分,在水土保持监测中的作用和优势逐渐显露,其快速获取流域地形地貌、植被状况、治理措施质量数量、水土保持效益监测、淤地坝面积及其淤积数量等方面监测的优势尤为突出,国内各流域机构监测中心、省级监测总站以及市级监测分站均在监测工作中逐步配备无人机监测设备,用于水土保持监测。但无人机航测数据处理中数据量大,工作周期长,精度难于掌控等因素,限制了无人机航测在水土保持监测中的应用。本研究利用临渭区苌沟流域无人机数据,在基于LPS处理方法,优化处理方法,提高数据处理精度,缩短处理周期上探索和改进处理方法,以期能使无人机航测在水土保持监测领域得到进一步发展。
2 LPS航测数据处理概述
LPS(Leica Photogrammetry Suite)是徕卡公司推出的数字摄影测量及遥感处理软件系列。LPS为影像处理及摄影测量提供了高精度及高效能的生产工具。它可以处理各种航天(最常用的卫星影像包括QuickBuid、IKONOS、SPOT5、LANDSAT等等)及航空(扫描航片、ADS40数字影像)的各类传感器影像定向及空三加密,处理各种数字影像格式,黑白、彩色及多光谱、高光谱等各类数字影像。LPS的应用还包括矢量数据采集、数字地模生成、正射影像镶嵌及遥感处理,它是第一套集遥感与摄影测量在单一工作平台的软件系列[4]。LPS无人机航测数据处理的常规流程如图1所示。

图1 LPS航测数据处理标准流程
LPS在数据处理过程中具备自动化程度高、工作效率突出的特点,但是受数据精度、算法结构等诸多因素影响,实际操作过程中仍存在以下问题:一是无人机作业采集的外方位元素(以下简称pos数据)存在较大误差时,不能自动匹配同名点[5];二是人工筛选同名点工作量大,误删和漏删同名点时常发生,不能保证影像同名点数量和精度;三是受自动生成同名点分布影响,正射影像拼接时裁剪线不规整,拼接影像有缺失、错位、扭曲等现象。上述存在的问题作为制约成果质量的因素亟待解决。
3 优化方案与案例分析
苌沟小流域位于渭南市临渭区厚镇,流域面积20km2,属秦岭北麓低山丘陵区,是陕西省水土保持及水土保持监测示范基地。获取该区域低空航测影像及地形信息可对各类设计和施工提供高精度的数据支撑。
笔者处理苌沟小流域航摄影像(240幅)时发现,在一个LPS标准处理流程中加入POS数据修订、二级优化及裁剪线优化等操作后,可有效提高成图质量,保障成果后期应用。如图2所示。

图2 LPS航摄影像处理优化方案
3.1POS数据修订
无人机高速作业过程中受气流影响,单次曝光时飞行姿态不稳,导致捕获的POS数据可能存在一定系统误差(集中体现在跨行带间俯仰及翻滚角上),影像拓扑范围与实际成像范围会产生偏移,极大降低同名点生成的准确率。
实际处理过程中,可利用第三方空间软件,计算出拓扑偏移量,从而完成俯仰及横滚角率定:选取航向正交方向单行影像,以相邻两幅影像为一调整单元进行人工对准(以奇数航带影像为基准调整偶数航带影像),通过如下公式即可完成率定。示意见图3。

图3 校准示意图
式中:ω(φ)——俯仰(横滚)偏移角;α——视角与大地平面夹角;h——飞行航高;
X(Y)——影像覆盖幅宽;Δx(y)——X(Y)轴偏移量。
3.2二级优化
LPS依托同名点进行空三结算后,通过判读同名点均方根误差(RMSE),可剔除误差较大的同名点以提高整体精度。由于软件自动生成的同名点数量巨大,且误差规律不明显(部分同名点的RMSE数值与其精度无必然联系),导致人工判读难度增大,判读效率低下,数据加工周期长,精度难以保证。
实际处理过程中,在软件自动生成同名点后,通过合理设置迭代次数以及期望误差值进行空三结算,剔除明显错误的同名点,即可接受此次空三结算结果。依托软件接受优化后的POS数据,舍弃第一次生成的同名点,重新完成自动同名点匹配(称二级优化),二级优化匹配的同名点RMSE数值会处于较低范围且误差呈明显规律性分布(错误同名点的RMSE数值会远远高于平均值),极大降低了人工判读难度,同时提高了数据处理工作效率和精度。本研究所应用的240副影像处理,在采用一级处理方案,并经过35小时的数据筛选后,生成的DTM仍有部分区域出现异常噪声点,而采用二级优化后,仅经过9小时的同名点筛选后,生成的DTM结果明显光滑,且地形分布合理。一级处理与二级优化后空三解算DTM对比如图4所示。
3.3裁剪线优化
影像镶嵌拼接之前,系统会根据影像分布状况自动生成裁剪线(seamline)。由于同行带、跨行带之间的影像重叠范围不尽相同,且因个别区域同名点分布不均等因素,生成的裁剪线可能出现异常(分布不均、裁剪线凌乱及部分影像未裁剪等现象),导致拼接的整幅影像会缺失个别斑块,或部分区域影像拼接出现错位、扭曲等现象,影响航测正射影像成果完整性。
本研究实际处理过程中,在完成裁剪线生成工作后,可根据目视判读,人工剔除裁剪线异常影像,且保证拓扑关系下影像覆盖作业范围,重复操作直至裁剪线排列规整,即可自动拼接色彩均衡、影像完整且精度较高的正射影像结果,裁剪线优化前后对比如图5所示。
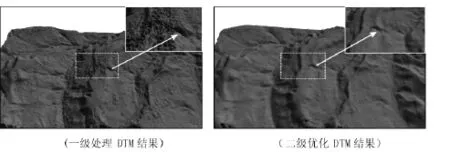
图4 一级处理与二级优化DTM结果对比

图5 裁剪线优化前后对比
4 结语
在苌沟小流域航测影像处理过程中,较常规数据处理,本研究采用的数据处理方案,可通过人工计算分析,修订pos数据,解决因无人机pos数据误差较大,无法完成同名点空三解算的问题,同时提高了同名点配对精度;通过二级优化不仅能提高同名点配对精度,而且可使各同名点误差呈规律性分布,便于人工删选,缩短数据处理周期,提高数据处理人员工作效率,也能极大的提高DTM解算精度,为下一步生成高精度正射影像奠定基础;优化裁剪线避免正射影像错位、扭曲、不完整等现象,保证了正射影像质量。该航测影像数据处理优化方案可为水土保持区域监测提供高实效、高精度的本底数据。陕西水利
[1]范承啸,韩俊,熊志军,赵毅.无人机遥感技术现状与应用[J].测绘科学,2009,05:214-215.
[2]谢涛,刘锐,胡秋红,姚新.基于无人机遥感技术的环境监测研究进展[J].环境科技,2013,04: 55-60+64.
[3]李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版),2014,05:505-513+540.
[4]鲁云飞,赵红颖,刘大平,晏磊.?基于几何矩预分类的无人机遥感图像自动配准方法[J].影像科学与光化学,2011,06:438-448.
[5]李玉霞,童玲,刘异,何磊.缺少控制点的无人机遥感影像几何畸变校正算法[J].电子科技大学学报,2013,03:75-80.
(责任编辑:畅妮)
S157
B