基于猫眼效应的激光主动探测技术研究
2016-10-21郭荣幸孙俊灵赵成马鹏阁
郭荣幸,孙俊灵,赵成,马鹏阁
1.郑州航空工业管理学院,河南郑州450000
2.航空经济发展河南省协同创新中心,河南郑州450000
3.北京工业大学电子信息与控制工程学院,北京100124
基于猫眼效应的激光主动探测技术研究
郭荣幸1,2,孙俊灵1,3,赵成1,马鹏阁1
1.郑州航空工业管理学院,河南郑州450000
2.航空经济发展河南省协同创新中心,河南郑州450000
3.北京工业大学电子信息与控制工程学院,北京100124
在现代战争中,对优秀狙击手的目标定位能力要求极高,而目前通用的目标识别算法对“猫眼”目标的识别精度不高,算法复杂且运行速度慢,无法满足对整个区域的实时监控要求。为此,本文在激光主动探测模型基础上,对图像的阈值处理、形态学处理、边界追踪和目标识别算法进行研究,建立了基于DSP芯片的激光主动探测系统并进行了室内外目标识别测试。结果表明:在室内,对简单目标算法的识别精度较高,且DSP芯片的图像处理速度较快并能够实时显示;在室外,当目标对光的反射强度高出其四周背景亮度几个数量级时,能够准确地将目标从背景中识别出来,系统的最大探测距离达1200 m,最小分辨率为200 m。
猫眼效应;激光探测;目标识别
近年来为了应对日益严重的狙击手威胁,各国纷纷开展了基于激光探测技术的主动反狙击装置的开发[1-3]。目前,欧美等发达国家将激光主动探测技术应用在车载、机载、便携等激光探测系统中,都取得了较好的作战效果,如美国的激光武器系统“魟鱼”、前苏联的激光致盲武器“拉瑟”、法国的激光反狙击手探测装置SLD500。而国内的激光探测技术对“猫眼”目标的探测精度不足,算法运行速度慢,无法实现实时监控的要求。针对上述问题,就要对目标探测算法进行优化,并使用速度更快、配置更高的硬件平台。
1 激光主动探测模型的建立与图像处理
1.1激光主动探测模型的建立
为了隐蔽激光探测系统,需选择人眼不可见的近红外波段激光,且此波段光在CCD上的灵敏度也较高。考虑到白天进行探测时,太阳光会对后续的图像处理产生较大的干扰,因此要在CCD前加装近红外波段窄带滤光片,用以减小太阳光干扰。实际目标探测时,离焦量、入射角会对目标的回光功率模型[4,5]产生很大影响。
1.1.1离焦量对激光回波的影响采用几何光学方法,将目标等效为由一个反射面和两个透镜组成的模型,具体如图1所示。
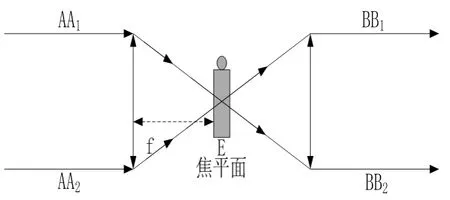
图1 猫眼效应等效模型Fig.1 The equivalent model of cat's eye effect
在图1的理想模型中,从远处发射过来的光束AA1和AA2,首先在焦平面的E点汇聚,然后其在焦平面的反射光按照镜面反射形式沿BB1和BB2返回。但由于具有猫眼效应的设备有制造和安装误差,其分划板、光敏面无法精确处于焦平面上,因此离焦量和入射角会对猫眼目标的回波发散角和激光有效接收面积产生影响,进而影响目标回光功率。
正离焦情况和负离焦情况下猫眼目标的等效模型如图2、图3所示。
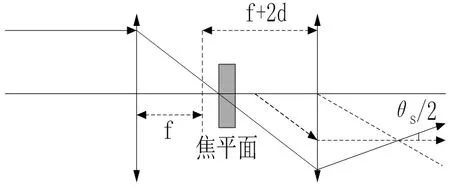
图2 正离焦等效模型Fig.2 Equivalent model of positive defocus
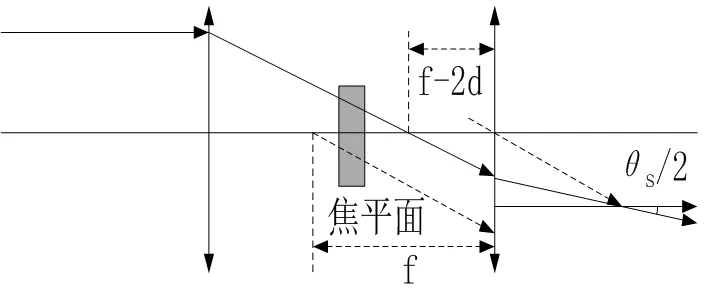
图3 负离焦等效模型Fig.3 Equivalent model of negative defocus
根据三角相似原理,正离焦情况下目标的回波发散角如式1所示,负离焦情况下目标的回波发散角如式2所示:

式中,D表示目标透镜的直径,f表示透镜焦距,d表示反射面的离焦量,θs表示回波发散角。对于一般光学元件:f>>d,所以目标的回波发散角都能够使用式2表示,因此猫眼目标的激光有效接收面积如式3所示。
1.1.2入射角对激光回波的影响入射激光一般分为正入射和斜入射[6]两种情况,在正入射和斜入射情况下离焦目标模型如图4、图5所示。
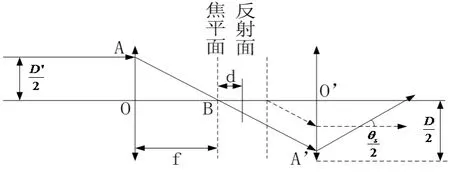
图4 正入射条件离焦目标模型Fig.4 The defocus target model at normal incidence
图5 斜入射条件离焦目标模型Fig.5 The defocus target model at oblique incidence
正入射条件下,猫眼目标的有效面积如式4所示,离焦量产生的回波束散角如式5所示:

依据几何光学原理,从A处发射出的激光到达B处的光斑面积如式6所示,由B处目标镜头反射回的激光到达A处的光斑面积如式7所示:

式中,θt表示发射激光的束散角,其余参数含义同前。
斜入射条件下,入射的激光与光轴之间有一定的角度,光束经过透镜后其聚焦点可能在反射面外,导致反射光不能出射,所以光束的最大入射角αMAX应满足式8所示。

斜入射的照射面积如式9所示,A处CCD探测到的目标回波光功率如式10所示。
式中,τt表示激光发射系统的透射率,τr表示探测系统光学镜头的透射率,τ表示单程激光水平大气透过率,τ2表示双程激光水平大气透过率,τs表示目标光学镜头透射率,ρs表示目标分化板的反射率,Ar表示CCD的面积。
1.1.3猫眼目标回波功率模型根据前述的讨论,CCD接收到目标的回波功率如式11所示:

式中,Pt表示激光发射器的发射功率,Ar表示镜头的接收面积,SCCD表示CCD靶面的光斑面积,ACCD表示CCD靶面的总面积,其余参数意义同前。
1.2图像处理与目标识别算法
1.2.1阈值处理根据多次实验测试总结,如果系统获取的图像中存在待识别的目标,则其最大的亮度值都大于190,所以可将190与图片中的最大亮度值进行对比,如果图片中的最大亮度值小于190,则认为图像中没有待识别的目标;若图片中的最大亮度值大于190,则用该阈值对图像进行分割。
1.2.2形态学处理在图像的形态学腐蚀和膨胀处理中,算法腐蚀使用的方法为:如果在某白色像素点八连通区域内有黑色像素点,则将该白色像素点转换为黑色像素点(像素灰度值设为16,以便与原灰度值为0的黑色像素点区分);算法膨胀使用的方法为:如果在某黑色像素点八连通区域内有白色像素点,则将该黑色像素点转换为白色像素点(像素灰度值设为阈值减10,以便与原灰度值为255的白色像素点区分)。
1.2.3边界追踪将一副图像划分为多个区域后,还需将其处理为适用于计算机处理的形式,根据待处理图像特征,区域采用边界来表示[7,8]。对于一个确定的二值区域R,追踪其边界的算法步骤如下:
①图像中左上角标记为1的点为起始点b0,b0西侧的邻近点以c0表示;
②c0一定是背景点,所以从c0起按照顺时针方向对b0的8个邻近点进行考察。b1代表考察过程中第一个值为1的点,并令c1作为序列中b1前的点,然后对b0与b1所处的位置进行储存;
③令b=b1且c=c1;
④从c起按照顺时针方向进行,令b的8个邻近点为n1,n2,…,n8,并找到第一个值为1的nk;
⑤令b=nk且c=nk-1;
⑥重复步骤3与步骤4,直到找到下一个边界点b1且b=b0。
当算法执行完成后,找到的b点序列就是排列后整个边界点的集合,图6中的a、b为边界追踪算法的前几步,算法追踪的最终边界如图6中的c所示:
图6 边界追踪算法各步骤示意图Fig.6 The process of boundary tracking algorithm
1.2.4目标识别图像边界找到后,下一步需要进行目标的识别,为了提高算法的精度,按照三种情况分别进行算法设计。
当边界的外接矩形长宽的像素平均值大于9时,此时目标主要特征为圆形,采用基于方差的算法识别圆形特征,具体算法步骤如下:
③如果r2与的比值大于阈值因子,则其为待识别的目标,此处阈值因子大小为该边界区域外接矩形长宽均值的0.1倍。
当区域外接矩形的长宽的像素均值不大于9时,目标形状信息并不明显。此时待识别的目标亮度较小,无法采用基于方差的圆形识别方法,应采用基于面积比的目标识别方法,算法的具体步骤如下:
①将区域外接矩形横纵坐标各向外各扩展5个像素,获得一个新边界范围F,然后按照此范围遍历原图像中各像素点,找到像素的最小值xmin和最大值xmax;
②重新确定二值化阈值T:T=(xmax+xmin)/2;
③确定新边界范围F内的原图像中像素值大于T的像素点数量,然后将这些像素点横坐标的最大值以x41表示,最小值以x31表示,纵坐标的最大值以y41表示,最小值以y31表示;
④将x41,x31,y41,y31四个值确定的矩形扩展为正方形;
⑤如果区域的圆形度阈值大于0.6,小于0.95,则认为此边界区域就是待识别的目标。
如果待识别的目标亮度值较大,其反射光存在着发散的衍射条纹,此时需要识别出发散的带有6个角的图形,具体算法步骤如下:
①首先计算出边界区域半径平方的均值;
②标记出峰值两侧半径平方相等的点;
③计算出步骤2中标记的各点对应的区域质心角度;
④将步骤3中计算出的角度按1、2;3、4;5、6…的组合取均值;
⑤计算出步骤4中取得角度的后向差分,获得n个角度值;
⑥如果n等于6,则认为目标识别成功,进行步骤7,否则继续处理后续区域;
⑦如果计算出的6个角度值与60度差的绝对值的均值与60度的比值小于阈值因子,则认为此边界区域就是待识别的目标。
2 结果与分析
为验证本文提出的目标主动识别算法是否正确有效,搭建了基于DSP芯片激光主动探测系统。首先在室内进行了目标识别实验来验证算法,然后在室外进行了大量的实验并对系统的最远探测距离和最小分辨率进行了定量测试。
2.1猫眼目标主动识别室内测试
室内实验的结果如图7所示,显示器显示不同图形时系统的目标识别情况如图右侧所示。其中,右上图中共有圆形和椭圆两种图形,矩形框将圆形标记出来,说明算法能够自动识别圆形和椭圆两种图形;右下图中共有五边形、矩形、圆形、同心圆四种图形,矩形框还是将圆形标记出来,说明算法对五边形、矩形和同心圆的图形干扰都能够识别出来,算法有效。
图7 室内测试结果Fig.7 The test results in doors
2.2猫眼目标主动识别室外测试
2.2.1室外识别可行性验证实验实验场地为楼顶天台,从系统自动获取的图片能够看出,目标的反光强度明显高于其四周背景亮度几个数量级,可以轻易的从背景中识别出来,说明系统能够完成室外目标的主动识别。
2.2.2室外识别分辨距离测试实验由于实验条件有限,系统探测的目标距离为200 m处并排的两个枪瞄,具体如图8所示。右图中两个枪瞄的距离是40 cm,系统能够将目标清晰的识别出来;左图中两个枪瞄的距离是25 cm,已经是系统对目标识别的极限。

图8 测试距离200 m时系统分辨率Fig.8 The resolution at the distance 200 m in test
系统的最大探测距离实验结果如图9所示,其中左侧为探测距离为300 m时的结果,中间为探测距离为800 m时的结果,右侧为探测距离为1200 m时的结果。

图9 最大探测距离实验结果Fig.9 The maximum detection range in test
从图9中可以看出,系统可以有效识别出距离800 m处的目标,但识别精度不高;当目标位于1200 m处时,激光强度下降幅度较大,使目标回波功率较小,激光基本全部在背景中淹没,此时系统基本无法识别出目标。
3 讨论
本文在进行激光主动探测技术研究的过程中,获得了一些有益的结果,但同时也存在一些问题:一是算法运行效率还不够高,复杂背景图像无法在限定时间内完成处理,这能够通过对一些程序采用汇编语言进行编写来改善;二是对于在阳光照射下自身亮度特别高的物体无法从图像中分离出来,这需将激光发射器更换为脉冲激光器,同时通过对连续取得的相邻两幅图像相减来消除伪目标,这样能够大幅度减小虚警率,提高系统的可靠性。这些还都需在后续的工作中继续研究验证。
4 结论
针对复杂背景中,常用目标识别算法对“猫眼”目标的识别精度不高等问题,本文首先对猫眼效应产生影响的各个因素进行了分析,推导出了猫眼目标回波功率模型。然后对获取的图像处理方法进行了研究,有效的提高了目标识别的精度,最后应用目标回波功率模型及图片处理算法搭建了实验系统进行了相关实验,实验结果表明本文提出的回波功率模型能够实现目标的主动探测且探测距离及分辨率较高。
[1]Yang Junfeng,Zhang Yin.Alternating direction algorithms for L1 problems in compressive sensing[J],Rice CAAM Report TR09-37,2013,4(12):20-25
[2]赵勋杰,高稚允,张英远.基于猫眼效应的激光侦察技术及其在军事上的应用[J].光学技术,2013,29(4):415-417
[3]孙华燕,赵延仲,郑勇辉,等.基于猫眼效应的激光主动探测技术研究与应用[J].装备学院学报,2015,23(6):6-13
[4]Candes E,Tao T.Near optimal signal recovery from random projections:Universal encoding strategies[J].IEEE Trans. Info.Theory,2013,52:5406-5425
[5]张博,张雏,武东生,等.斜入射条件下猫眼目标回波功率分析[J].激光与红外,2014,39(10):1046-1050
[6]赵延仲,孙华燕,宋丰华,等.倾斜离轴高斯光束通过猫眼光学镜头的传输特性[J].光学学报,2015,29(9):2252-2556
[7]冯明.一种基于改进的图像传感器测量瞬时车速的方法[J].山东农业大学学报:自然科学版,2015,46(2):243-246
[8]RenXiming,Lili.Recognizing cat-eye targets with dual criterions of shape and modulation frequency[J].Chin.Opt.Lett,2014,3(9):1-5
Study on the LaserActive Detection Technology Based on the Cat's Eye Effect
GUO Rong-xing1,2,SUN Jun-ling1,3,ZHAO Cheng1,MAPeng-ge1
1.Zhengzhou University of Aeronautics,Zhengzhou 450000,China
2.Cooperative Innovation Center for Aviation Economy Development,Zhengzhou 450000,China
3.College of Electronic Information and Control Engineering/Beijing University of Technology,Beijing 100124,China
To improve the ability for a sniper to locate enemies in modern war,instead of using the present target recognition technology erroneous complex and slow so as to lead to come to nothing,this paper performed the process of image threshold,morphology,boundary tracking and target identification algorithm based on the model of laser active detection to establish the laser active detection system with DSP chip and test it indoor and outdoor.The results showed that the target recognition accuracy was higher for the simple objects and image process was faster and actual in doors;the objects were distinguished from a complex background when the target light reflection intensity was higher than its background brightness around several orders of magnitude,the max-detection range went to 1200 meters and the mini distinguish ability went to 200 meters out doors.
Cat's eye effect; laser active detection;target recognition
TN202
A
1000-2324(2016)02-0278-05
2015-04-20
2015-06-02
航空科学基金重点项目:非高斯杂波背景下基于TRD的低可观测性激光目标检测与跟踪技术研究(2014ZC13004);郑州航院青年基金项目:基于多种探测的汽车ADAS关键技术研究(2016133001)
郭荣幸(1980-),男,河南南阳人,硕士,讲师,主要研究方向为信息处理、目标探测识别.E-mail:guogrx@163.com
