整地筑埂两用机传动系统的设计
2016-10-19赵丽萍何新如杨丹
赵丽萍 何新如 杨丹

摘要:为了提高水稻种植机械化的程度,针对其生产过程中的整地筑埂作业工序,设计了一种稻田生产用整地筑埂两用机的传动系统,该传动系统主要由变速箱、传动轴、链传动系统、两个旋耕集土器半轴、离合器、轴承等关键部件组成;采用轮式拖拉机为动力,实现了一次进地,可同时完成整地和筑埂两种作业。田间试验表明,该传动系统设计合理、性能稳定、技术先进,为水稻生产过程全程机械化提供了技术支持。
关键词:整地筑埂;两用机;传动系统;设计
中图分类号:S222.4 文献标识码:A 文章编号:0439-8114(2016)08-2105-03
DOI:10.14088/j.cnki.issn0439-8114.2016.08.048
Abstract:In order to improve the degree of mechanization of rice cultivation process, a drive system on a kind of rotating and building ridge dual-purpose machine was designed. The drive system mainly consists of the transmission, drive shaft, chain transmission parts, clutch and other components. The wheeled tractors was used, and land rotary tillage and ridging were completed at the same time. Field tests showed that the drive system was designed reasonably, and its function was stable,its technology was advanced, the support were provided to full mechanization in paddy field.
Key words: rotating and building ridge;dual-purpose machine;drive system;design
水稻是人们赖以生存的主要粮食作物,其在粮食安全生产中占有非常重要的地位。在水稻生产过程中,插秧前需要进行水田灌溉,将田地划为田字形的方格,在方格周围修筑土埂,所筑土埂能够挡水,使之浸润土壤。筑埂是实现水田灌溉的关键,坚实合理的田埂不仅能满足水稻对水分的需求[1],还可节约水资源。水田筑埂属于水稻机械化生产过程中的整地环节。长期以来,水田筑埂都依靠人力完成,人工筑埂是一项既繁重又费工的劳动,即使借助一些专用工具,劳动强度依然很大,工作效率很低,成本却很高,田埂的一致性和均匀性差,且需要人工辅助压实,已不适合中国大面积平原地区种植水稻的耕作模式,更不利于推进水田生产机械化的发展。因此,及时而优质地修筑效果满意的土埂是水稻生产的基本条件之一,修筑田埂最好的方法就是采用机器筑埂。水田筑埂机械化是实现水田生产机械化生产必不可少的重要环节,实现筑埂机械化已迫在眉睫[2-5]。
文獻表明,国内外对水田筑埂机有一定的研究[6-15]。但一般的筑埂机只有筑埂功能,没有整地功能,且工作效率较低。因此,有必要研制一种稻田生产用整地筑埂两用机,能够在旋耕土壤的同时筑出一条土埂,以实现用一种机型解决旋耕、筑埂两种机型的通用问题,既能有效解决人工筑埂存在的许多问题,以满足水稻生产过程中节本增效的实际需要,实现了整地和筑埂作业全程机械化,又能减轻稻农购买机具的投资成本,方便机具的使用与维修,提高其利用率。新型整地筑埂两用机是由吉林省科学技术厅资助、吉林农业大学承担的重点科研项目。该机器技术关键是既要体现水稻生产过程中水田农艺技术的先进性,还要保证旋耕、筑埂的通用性,因此为其设计一套安全可行的整地、筑埂传动系统至关重要。
1 传动系统方案的确定及计算
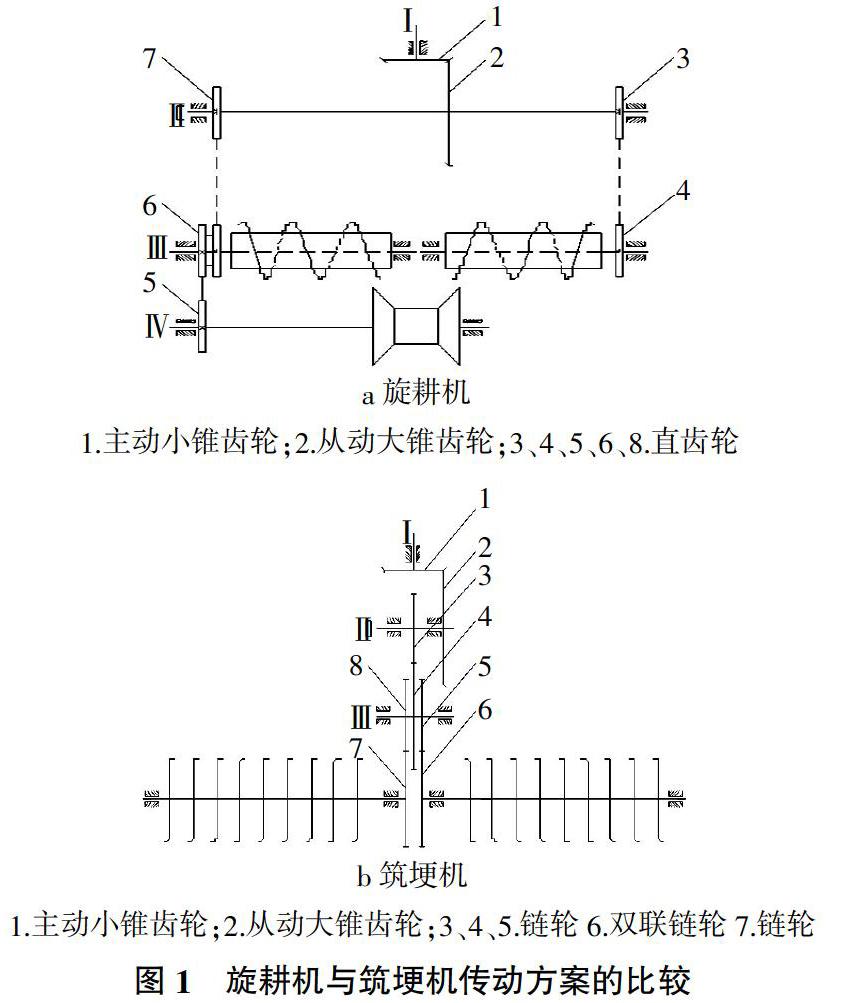
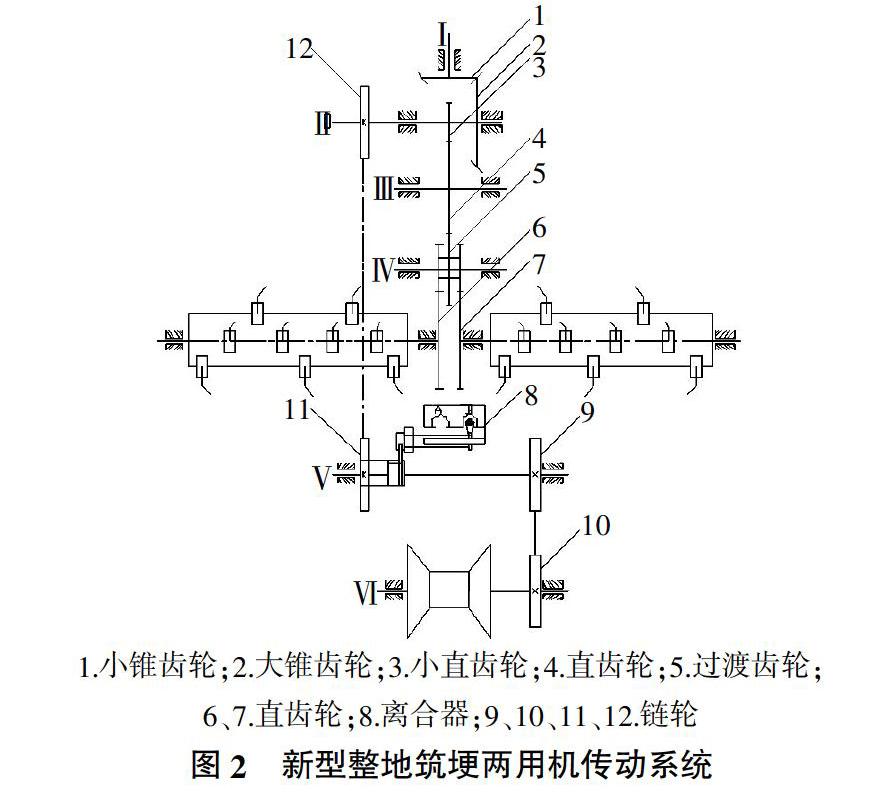
单一功能的旋耕机与筑埂机传动方案如图1所示。由图1a可见,旋耕机的动力输入轴Ⅰ的动力经过1对锥齿轮和三级直齿轮传动,传递到2个旋耕刀半轴上,带动旋耕刀旋转,从而达到切碎土壤的目的。由图1b可见,筑埂机的动力输入轴Ⅰ的动力经过1对锥齿轮和链轮传动,一方面通过两侧链传动将动力传递2个螺旋集土器的半轴上,带动其旋转,使其在前进的过程中将土壤在中间聚集成一条土埂;另一方面,动力通过双联链轮,也将动力传递到筑埂辊,从而将前面形成的土壤到压实成型。旋耕机传动方案中,在旋耕时齿轮箱下有漏耕存在,筑埂机传动方案中,由于双边采用链传动,传动轴Ⅱ过长,工作可靠性较差。本研究结合以上两种机器传动系统的优点,设计了一种新型整地筑埂两用机的传动系统,其结构如图2所示。由图2可见,该传动系统主要由变速箱、传动轴、链传动系统、2个旋耕集土器半轴、离合器8、轴承等关键部件组成。
1.1 动力传递方式
由图2可见,工作时拖拉机输出的动力通过万向节传递给变速箱的动力输入轴Ⅰ,通过动力输入轴Ⅰ上的1对锥齿轮的啮合,带动轴Ⅱ旋转。轴Ⅱ上的动力一方面通过4级直齿轮传动将动力传递到轴Ⅲ、轴Ⅳ,由轴Ⅳ上的三联齿轮带动齿轮旋转,从而实现2个半螺旋型旋耕集土器的刀轴旋转,完成整地作业;另一方面,轴Ⅱ上的动力通过安装在其上的链轮,将传递到轴Ⅴ上,从而带动筑埂装置上的推压成型辊旋转,将土壤最终压实成型。
1.2 旋耕集土器的设计
在左、右对称的刀轴上分别设计有呈螺旋形排列的整地集土刀片,并使左半轴刀轴上的刀片采用右旋排列,右半轴刀轴上的刀片采用左旋排列,结果使刀片在旋切土壤的时候,既可以由上向下切削土壤,使之破碎,又能使部分土壤向中间聚集,为筑埂的土源聚集奠定基础。因此,应将刀片的刀身设计得较宽阔,刃口部位微弯,形状则如风扇叶形或螺旋浆叶形[16,17],如图3所示。刀轴材料选40 Cr,刀座材料则采用16 Mn钢板制造,焊接在刀轴上,刀片采用65 Mn高碳钢板冲压成型,热处理硬度要求HRC50左右。
1.3 传动比的计算
该机配套动力为58~81 kW以上轮式拖拉机。考虑该机工作幅宽为2.3 m,工作负荷较大,筑埂时拖拉机行走速度较小时效果较好,故选择拖拉机动力输出轴转速为540 r/min。
1.3.1 旋耕状态 旋耕部件减速器的齿轮传动为四级齿轮传动,一级传动为1对锥齿轮,输入的转速540 r/min,输入小锥齿轮齿数z1=13,输出大锥齿轮齿数z2=28,传动比i1x=z2/z1=2.15,二级为直齿圆柱齿轮传动,输入齿轮齿数z3=13,输出齿轮齿数z4=33,传动比i2x=2.54,三级为直齿圆柱齿轮传动,输入齿轮齿数33,输出齿数30,传动i3x=0.91,四级直齿圆柱齿轮传动,输入齿数为30,输出齿数为16,故传动比i4x=0.53,则总传动比ix为:ix=i1x·i2x·i3x·i4x=2.63。
1.3.2 筑埂状态 由拖拉机输出的动力,通过变速箱传递到轴Ⅱ,再经三级链传动,最终驱动推压成型辊,将土埂成型打实。链传动为三级,一级传动比i1z=1,二級传动比i2z=1,一、二级链轮齿数均为17齿,三级链传动输入链轮齿数是17齿,输出链轮齿数是15齿,故其传动比i3z=0.88。由于本机器传动动力较大,为保证动力传动的安全性和平稳性,选用型号是20A的双排滚子链。计算得旋耕刀轴和推压成型辊转速分别为209 r/min和285 r/min,满足了旋耕和筑埂的农艺要求。
1.4 离合器的设计
该两用机传动系统中的轴Ⅴ上设计安装牙嵌式离合器,如图4所示。如果只进行整地作业,将拨叉限位块上的操作手柄移动到最右侧限位处,此时操作手柄带动拨叉将牙嵌式滑移齿轮沿着花键轴向右移动,与链轮齿分离,花键轴停止转动,无动力输出。这时,采用拖拉机为动力用液压油缸将集土器和筑埂装置以轴Ⅴ为旋转轴,向上旋起。该两用机可只进行整地作业;如果同时进行整地和筑埂作业,则将图4中的拨叉限位块上的操作手柄移动到最左侧限位处,此时操作手柄带动拨叉将滑移齿轮沿着花键轴向左移动,与链轮齿啮合,花键轴转动,动力经链轮输出传递到推压成型辊,使其旋转,拖拉机在前进的过程中,同时完成整地和筑埂作业。可见,离合器的安装,可以实现该机在旋耕作业中推压成型辊的静止与整地筑埂过程中推压成型辊的转动之间的切换,即通过拨叉,使滑移齿轮与链轮齿的啮合与分离,从而实现推压成型辊的动、静切换,从而真正实现可调节式的一机两用。
2 传动系统的技术关键
1)通过操纵拨叉,可以实现筑埂推压成型辊的动、静切换,从而实现了同一台机器能够一机两用,同时完成整地、筑埂两种作业工艺。
2)无需进行筑埂作业时,可通过离合器使花键轴停止转动,筑埂部件可以通过液压缸使之升起,此时机器可以只进行旋耕作业,提高了机器的利用率。
3)旋耕刀轴分左、右2个半轴,减小了单轴转动的扭矩,提高了作业的平稳性和可靠性。
3 小结
田间试验表明,该两用机的传动系统设计比较合理、技术先进、性能稳定可靠,有效地实现了整地和筑埂联合,各项性能指标均达到了预期目标,为水稻生产过程全程机械化提供了技术支持和有利保障。
参考文献:
[1] 王金峰,王金武,孔彦军,等.悬挂式水田筑埂机及其关键部件研制与试验[J].农业工程学报,2013,29(6):28-34.
[2] 韩休海,于 磊,邢占强.黑龙江省水田耕整地机械化技术研究[J].农业科技与装备,2013,232(10):40-41,44.
[3] 丁善刚.水稻机械化生产的现状与思考[J].现代农业科学,2009,16(5):263-264.
[4] 周亮经.浅谈水稻机械化生产存在的问题及解决对策[J].中国农业信息,2011(1):37-38.
[5] 张文毅,袁钊和,吴崇友,等.水稻种植机械化进程分析研究[J].中国农机化,2011(1):19-22.
[6] 车 刚,张 伟,万 霖,等.基于灭茬圆盘驱动旋耕刀多功能耕整机设计与试验[J].农业工程学报,2012,28(20):34-40.
[7] MALLEY D F, MCCLURE C, MARTIN P D. Compositional analysis of cattlemanure during composting using a field portable near infrared spectrometer[J]. Communications in Soil Science and Plant Analysis,2005,36(4):455-476.
[8] 杜巧连,熊熙程,魏建华.拖拉机液压悬挂耕深电液控制系统设计与试验[J].农业机械学报,2008,39(8):62-65.
[9] 周建来,李源知,焦巧凤.国内外旋耕机的技术状况[J].农机化研究,2000,22(2):49-51.
[10] 丁为民,王耀华,彭嵩植.正、反转旋耕不同耕作性能的比较[J].南京农业大学学报,2003(3):105-109.
[11] 辛海江.浅谈稻田筑埂机[J].现代化农业,2012(1):29.
[12] 韩振生.水田筑埂装置结构与受力分析[J].农机化研究,2013, 35(6):45-47.
[13] 关振君.DTZG-01型稻田筑埂机的设计研究[J].农业科技与装备,2011(10):20-22.
[14] 刘百合.系列水田筑埂机介绍[J].农业机械,2011(1):76.
[15] 闫怀峰.条畦灌溉筑埂机的改制[J].新疆农机化,2010(2):13.
[16] 鲍秉启,安龙哲,胡文英.我国和日本等国水田机械发展概况[J].农机化研究,2002,24(3):23-25.
[17] 梁 政,旋耕机改进为旋耕起垄机的设计及制造[J].现代农业装备,2008(5):48.
