周转轮系的转化与传动比计算方法
2016-10-19潍坊工程职业学院谢宗华郇新
潍坊工程职业学院 谢宗华 郇新
周转轮系的转化与传动比计算方法
潍坊工程职业学院谢宗华郇新
在学习《机械设计基础》课程中轮系章节内容时,学生们普遍反映的难点就是周转轮系。由于周转轮系种类繁多结构复杂,需要我们明白其转化原理并使用合理的计算方法,才能快速而准确地计算出其传动比,本文主要针对几种典型的周转轮系进行传动比计算予以讲解。
周转轮系;传动比;转化
1 周转轮系的转化
首先我们来认识周转轮系,它的特点在于轮系中有一个转动的系杆,不但有自传还有公转。由于我们思维的定式,观察物体运动的时候,习惯了以一个静止的物体为参照物计算其绝对速度。假如我们能够通过一定的转化而得到一个假想的定轴轮系,就可以快速计算出其传动比。
具体方法为:假设有一周转轮系如图1所示,由太阳轮1、行星轮2和系杆H组成,转速分别为n1、n2、n3、nH。假如以大地为参照,行星轮2既有自转又有公转,这样无法通过直接的运算得到传动比。当我们把观察的视角放在行星轮上时,我们的动作就和它同步运动,行星轮和我们的相对速度转化成了零。转化后的转速分别为:
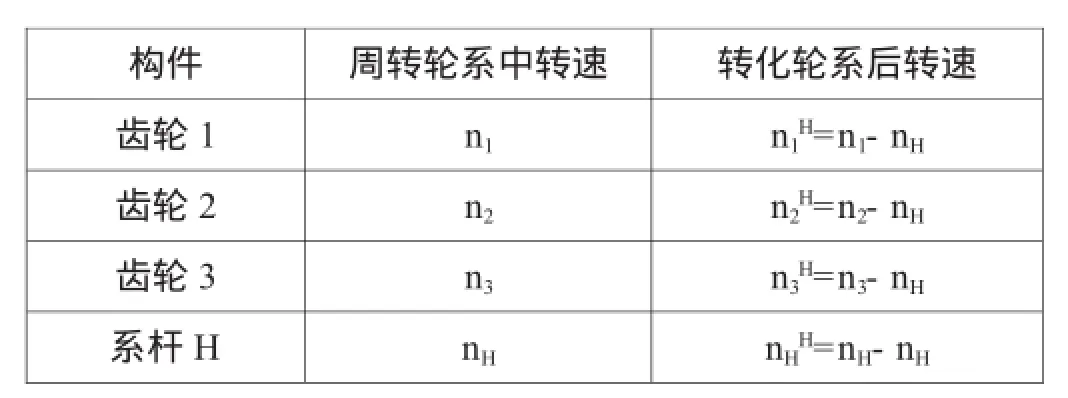
构件 周转轮系中转速 转化轮系后转速齿轮1 n1 n1H=n1-nH齿轮2 n2 n2H=n2-nH齿轮3 n3 n3H=n3-nH系杆H nH nHH=nH-nH
当我们从这个角度再去观察其余齿轮转速的时候,所呈现的轮系就是一个定轴轮系。这样就可以快速地计算出其传动比,我们把这种方法称为反转法。

图1 周转轮系
2 常见周转轮系的传动比计算
我们通过这种方法对两种不同类型的周转轮系进行传动比分析。
2.1平面差动轮系传动比计算
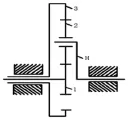
图2 差动轮系
已知平面差动轮系如图2所示,各齿轮齿数分别为Z1=20,Z2=30和Z3=80,其转速n1=100r/min和n3=20r/min。
当齿轮1、3转向相同和相反时,分别求系杆H转速nH。
求解:由周转轮系传动比的计算公式可得出:


结果为正,说明系杆H与两个原动件的转向相同。

结果为正,说明系杆H与原动件齿轮1同向,与齿轮3反向。2.2空间周转轮系传动比计算

图3 空间周转轮系
已知空间周转轮系如图3所示,由齿轮1、2、2'、3以及系杆H组成,各齿轮的齿数分别为Z1=48,Z2=42,Z2'=18和Z3=21,其转速分别为n1=100r/min,n3=80r/min,转向如图所示,试求nH。
求解:分析轮系可知,齿轮1、3和系杆H轴线平行,可以运用周转轮系传动比计算公式。与平面轮系不同的是,空间周转轮系齿轮转动方向只可通过标箭头的方法确定,如图3(b)。给定齿轮1方向向下,按啮合关系进行分析得出齿轮3向上,故齿轮1、3计算过程中应注意正负号,即:

图中齿轮1、3的转向相反,假设齿轮1的转向为正,则齿轮3为负,可以得出:
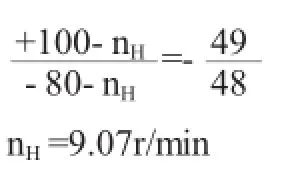
最终结果为正,说明系杆H转向与齿轮1同向。
3 周转轮系传动比计算注意事项
综上分析,计算周转轮系传动比时需要注意以下几点:
(1)周转轮系中齿轮和系杆轴线重合或平行,才能进行矢量相加。
(2)iGKH≠iGK。iGKH为齿轮G和K的绝对转速之比,其大小及正负应该按照定轴轮系传动比的计算方法确定。而iGK则是周转轮系中齿轮G和K的绝对转速之比,其大小与正负号必须由计算结果决定。
(3)nG、nK、nH为绝对转速,在代入时要带上正、负号。在未知转速方向时,可先假定某一齿轮方向转速为正,其余齿轮转速与其同向为正,反向为负。
(4)空间周转轮系计算时,iGKH中两齿轮G和K的轴线与系杆H的轴线是平行的,可用转化机构法进行求解。计算传动比时要注意正负号。若轴线是不平行的,则不能用转化机构法求解。
4 结束语
在工作中我们会遇到各种各样的轮系,需要我们能正确区分并计算。教师在教学中应注意培养学生分析问题和解决问题的能力,并注意突破创新,打破惯性思维。尤其是在学习周转轮系机构的转化时,要注重启发学生用定轴轮系的传动比计算方法求解,只有这样才能学会分析各种周转轮系机构。
[1]吕伟文,刘泽深.陈金艳.机械设计基础[M].东北师范大学出版社,2015,5.
[2]杨可帧,程光蕴.机械设计基础(第六版)[M].高等教育出版社,2014.2.
[3]于影,于波.轮系的分析与设计[M].哈尔滨工程大学出版社,2015.6.
谢宗华,1986年6月出生,山东青州人,本科,研究方向:机械设计。