自动驾驶的五项挑战
2016-10-18
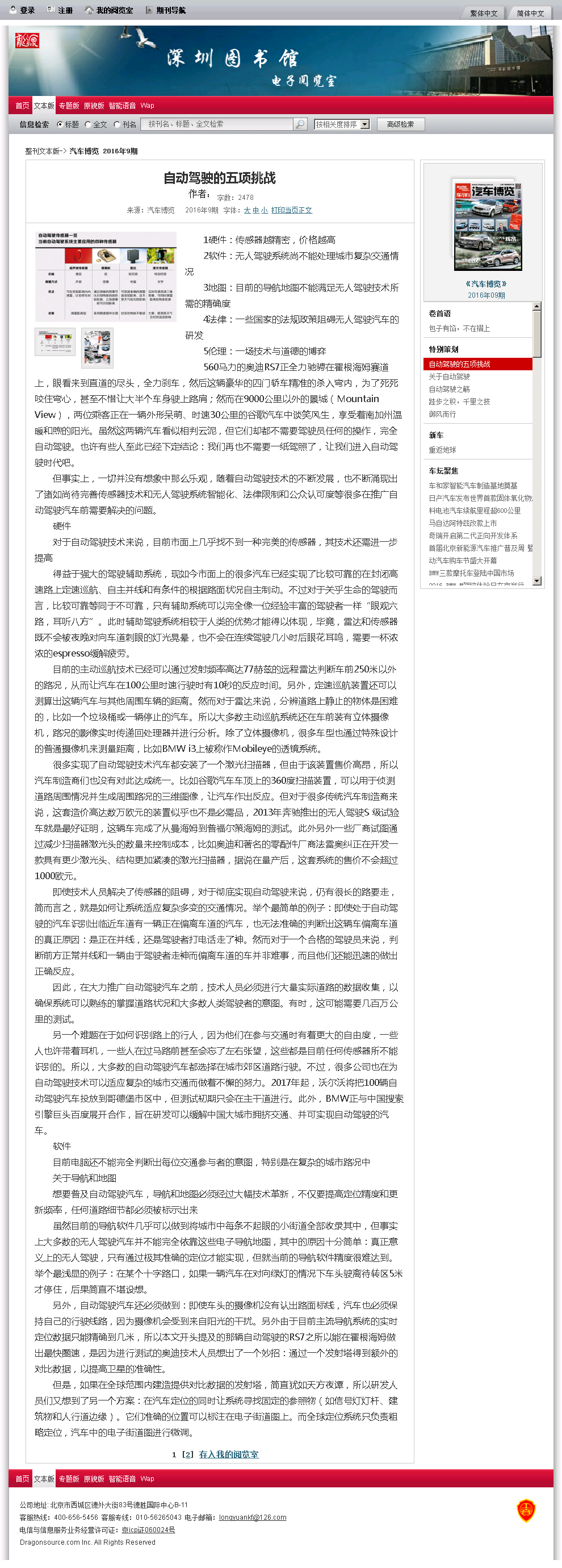

1硬件:传感器越精密,价格越高
2软件:无人驾驶系统尚不能处理城市复杂交通情况
3地图:目前的导航地图不能满足无人驾驶技术所需的精确度
4法律:一些国家的法规政策阻碍无人驾驶汽车的研发
5伦理:一场技术与道德的博弈
560马力的奥迪RS7正全力驰骋在霍根海姆赛道上,眼看来到直道的尽头,全力刹车,然后这辆豪华的四门轿车精准的杀入弯内,为了死死咬住弯心,甚至不惜让大半个车身驶上路肩;然而在9000公里以外的景城(Mountain View),两位乘客正在一辆外形呆萌、时速30公里的谷歌汽车中谈笑风生,享受着南加州温暖和煦的阳光。虽然这两辆汽车看似相判云泥,但它们却都不需要驾驶员任何的操作,完全自动驾驶。也许有些人至此已经下定结论:我们再也不需要一纸驾照了,让我们进入自动驾驶时代吧。
但事实上,一切并没有想象中那么乐观,随着自动驾驶技术的不断发展,也不断涌现出了诸如尚待完善传感器技术和无人驾驶系统智能化、法律限制和公众认可度等很多在推广自动驾驶汽车前需要解决的问题。
硬件
对于自动驾驶技术来说,目前市面上几乎找不到一种完美的传感器,其技术还需进一步提高
得益于强大的驾驶辅助系统,现如今市面上的很多汽车已经实现了比较可靠的在封闭高速路上定速巡航、自主并线和有条件的根据路面状况自主制动。不过对于关乎生命的驾驶而言,比较可靠等同于不可靠,只有辅助系统可以完全像一位经验丰富的驾驶者一样“眼观六路,耳听八方”。此时辅助驾驶系统相较于人类的优势才能得以体现,毕竟,雷达和传感器既不会被夜晚对向车道刺眼的灯光晃晕,也不会在连续驾驶几小时后眼花耳鸣,需要一杯浓浓的espresso缓解疲劳。
目前的主动巡航技术已经可以通过发射频率高达77赫兹的远程雷达判断车前250米以外的路况,从而让汽车在100公里时速行驶时有10秒的反应时间。另外,定速巡航装置还可以测算出这辆汽车与其他周围车辆的距离。然而对于雷达来说,分辨道路上静止的物体是困难的,比如一个垃圾桶或一辆停止的汽车。所以大多数主动巡航系统还在车前装有立体摄像机,路况的影像实时传递回处理器并进行分析。除了立体摄像机,很多车型也通过特殊设计的普通摄像机来测量距离,比如BMW i3上被称作Mobileye的透镜系统。
很多实现了自动驾驶技术汽车都安装了一个激光扫描器,但由于该装置售价高昂,所以汽车制造商们也没有对此达成统一。比如谷歌汽车车顶上的360度扫描装置,可以用于侦测道路周围情况并生成周围路况的三维图像,让汽车作出反应。但对于很多传统汽车制造商来说,这套造价高达数万欧元的装置似乎也不是必需品,2013年奔驰推出的无人驾驶S 级试验车就是最好证明,这辆车完成了从曼海姆到普福尔策海姆的测试。此外另外一些厂商试图通过减少扫描器激光头的数量来控制成本,比如奥迪和著名的零配件厂商法雷奥纠正在开发一款具有更少激光头、结构更加紧凑的激光扫描器,据说在量产后,这套系统的售价不会超过1000欧元。
即使技术人员解决了传感器的阻碍,对于彻底实现自动驾驶来说,仍有很长的路要走,简而言之,就是如何让系统适应复杂多变的交通情况。举个最简单的例子:即使处于自动驾驶的汽车识别出临近车道有一辆正在偏离车道的汽车,也无法准确的判断出这辆车偏离车道的真正原因:是正在并线,还是驾驶者打电话走了神。然而对于一个合格的驾驶员来说,判断前方正常并线和一辆由于驾驶者走神而偏离车道的车并非难事,而且他们还能迅速的做出正确反应。
因此,在大力推广自动驾驶汽车之前,技术人员必须进行大量实际道路的数据收集,以确保系统可以熟练的掌握道路状况和大多数人类驾驶者的意图。有时,这可能需要几百万公里的测试。
另一个难题在于如何识别路上的行人,因为他们在参与交通时有着更大的自由度,一些人也许带着耳机,一些人在过马路前甚至会忘了左右张望,这些都是目前任何传感器所不能识别的。所以,大多数的自动驾驶汽车都选择在城市郊区道路行驶。不过,很多公司也在为自动驾驶技术可以适应复杂的城市交通而做着不懈的努力。2017年起,沃尔沃将把100辆自动驾驶汽车投放到哥德堡市区中,但测试初期只会在主干道进行。此外,BMW正与中国搜索引擎巨头百度展开合作,旨在研发可以缓解中国大城市拥挤交通、并可实现自动驾驶的汽车。
软件
目前电脑还不能完全判断出每位交通参与者的意图,特别是在复杂的城市路况中
关于导航和地图
想要普及自动驾驶汽车,导航和地图必须经过大幅技术革新,不仅要提高定位精度和更新频率,任何道路细节都必须被标示出来
虽然目前的导航软件几乎可以做到将城市中每条不起眼的小街道全部收录其中,但事实上大多数的无人驾驶汽车并不能完全依靠这些电子导航地图,其中的原因十分简单:真正意义上的无人驾驶,只有通过极其准确的定位才能实现,但就当前的导航软件精度很难达到。举个最浅显的例子:在某个十字路口,如果一辆汽车在对向绿灯的情况下车头驶离待转区5米才停住,后果简直不堪设想。
另外,自动驾驶汽车还必须做到:即使车头的摄像机没有认出路面标线,汽车也必须保持自己的行驶线路,因为摄像机会受到来自阳光的干扰。另外由于目前主流导航系统的实时定位数据只能精确到几米,所以本文开头提及的那辆自动驾驶的RS7之所以能在霍根海姆做出最快圈速,是因为进行测试的奥迪技术人员想出了一个妙招:通过一个发射塔得到额外的对比数据,以提高卫星的准确性。
但是,如果在全球范围内建造提供对比数据的发射塔,简直犹如天方夜谭,所以研发人员们又想到了另一个方案:在汽车定位的同时让系统寻找固定的参照物(如信号灯灯杆、建筑物和人行道边缘)。它们准确的位置可以标注在电子街道图上。而全球定位系统只负责粗略定位,汽车中的电子街道图进行微调。
