基于LabVIEW的机器人运动仿真
2016-10-18陈华宇,高璐,陆强等
基于LabVIEW的机器人运动仿真
机器人是机械、电子、控制、计算机和通信等多个学科的高新技术的综合集成,机器人在各个领域的应用范围越来越广,并且机器人的智能化也越来越高。在国外,日本、德国和美国等国家在机器人领域处于领先地位。日本具有国际上最先进的机器人技术,不论在技术还是市场应用上,日本都走在前列;德国和美国仿生机器人,工业机器人等领域也处于国际前列。
我国的机器人产业虽然起步晚,但在“七五”、“八五”和“九五”机器人技术国家攻关,以及“863”高技术发展计划的重点支持下,我国的机器人技术也取得了重大进展,在国内的一些高校,如清华大学、上海交通大学、浙江大学和哈尔滨工业大学都取得了一些成绩。在进行机器人研究时,仿真是一个重要的研究方法,大部分研究者以MATLAB作为平台仿真机器人运动。
近几年,LabVIEW技术逐渐引入机器人研究中[5-7]。LabVIEW是一种程序开发环境,由美国国家仪器公司研制开发,LabVIEW使用的是图形化编辑语言编写程序,产生的程序是框图的形式。 LabVIEW软件是虚拟仪器设计平台的核心,其提供的机器人模块是机器人设计的理想工具。
Puma560机器人理论
本论文在LabVIEW环境下,利用机器人模块对Puma560机器人建模,通过仿真研究机器人的正逆运动学和运动规划。
机器人介绍
Puma560机器人是六自由度串联结构机器人,由六自由度旋转关节构成,机器人坐标图如图1所示。
图1中,Xi坐标轴为沿着Zi和Zi-1的公法线,指向离开Zi-1轴的方向;Yi坐标轴是按照右手直角坐标系法则制定的;Zi坐标轴为沿着i+1关节的运动轴;Zi和Zi-1两轴心线的公法线长度为ai;Zi和Zi-1两轴心线的夹角为αi;Xi和Xi-1两坐标轴的公法线长度为di;Xi和Xi-1两坐标轴的夹角为θi。
运动学方程和运动规划
机器人位置结构和姿态结构末端执行器的位置矢量和姿态转换矩阵,通过D-H齐次变换得到两杆间的位姿矩阵:
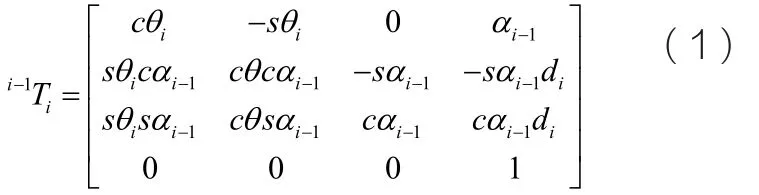
式(1)中,sθi=sinθi,cθi=cosθi,sαi-1=sin αi-1,cαi-1=cosαi-1。
所以机器人的运动学方程为:

那Puma560机器人运动学的正解为:


图1 Puma560机器人坐标图
机器人运动学逆解就是已知末端连杆的位置和方位,求得机器人的各个关节变量,对于Puma560机器人,就是求解变量θ1<θ6。
机器人的运动规划主要研究控制机器人的运动轨迹,使机器人按照规定的路径运动,通常对各个关节按照联动控制进行关节间的运动规划,关节运动规划的内容主要包含关节运动轨迹的选择和关节运动位置的插值。

图2 生成机器人程序图

图3 运动学正解程序图

图4 运动学逆解程序图
机器人运动仿真
首先需要构建机器人,依据前面的理论知识,利用LabVIEW提供的机器人模块的Acquire Kinematicsarameters和Generate Arm Kinematic Model子模块生成Puma560机器人,程序图如图2所示。
利用LabVIEW提供的机器人模块的Forward Kinematics子模块进行Puma560机器人运动正解分析,程序图如图3所示。
当机器人运动时,需要给出位姿的末端位置,通过子模块Posture to Transform、Analytical Inverse Kinematics和Joint Trajectory实现机器人运动学分析,得到机器人关节运动规划,程序图如图4所示。
结语
本论文以Puma560机器人为机器人原型,利用LabVIEW提供的机器人模块,编写程序实现了机器人模型的建立和运动学解析。该系统的实现,说明LabVIEW是机器人研究的有力工具,可以提高机器人设计的效率。
10.3969/j.issn.1001- 8972.2016.18.010
