采用/△变换拓宽异步电动机恒转矩调速范围控制系统
2016-10-15苏志从王榕生
苏志从 王榕生
(福州大学电气工程与自动化学院,福州 350116)
苏志从 王榕生
(福州大学电气工程与自动化学院,福州 350116)
提出了/△变换拓宽异步电动机恒转矩变频调速范围的方法。分析了异步电动机/△变换运行时的数学模型,构建了基于绕组开放式异步电动机的/△变换运行时转子磁链定向控制系统的Matlab/Simulink仿真模型。以TMS320F2812 DSP为控制器,搭建了实验平台。实验与仿真结果表明采用/△变换能显著拓宽异步电动机恒转矩变频调速范围,能显著提升电机功率密度。
/△变换;恒转矩;异步电动机
交流电动机在基频(50Hz)以下为恒转矩调速区,但在基频以上区域,受母线电压的限制,电机定子绕组线电压无法继续提高,若继续提高电机转速,转矩也随速度的上升而下降,无法满足基频以上高速运行时仍具有恒转矩输出的驱动要求。
提高电机额定电压,可以拓展电机恒转矩调速范围,但受功率器件耐压的限制。采用两电平逆变器通过器件的串联技术来提高系统承受电压的能力,此种方法存在动、静态均压的问题。采用多电平逆变技术可以避开器件串联引起的动、静态均压问题,使得输出相同电压时器件耐压降低,实际应用中主要有三电平逆变技术和功率单元串联式多电平逆变技术,但是三电平逆变器带负载时存在中性点电位波动问题;功率单元串联式多电平逆变器技术存在串联变频器单元较多,所需功率器件多,控制复杂的问题[1]。直接减小电机绕组匝数,也可以拓宽恒转矩调速范围,但是当电机运行在低速区,逆变器的调制度M很小,输出电压电流谐波大,低速区性能差。结合绕组变换技术,在高速区动态切除部分绕组[2-3],也可以提高电机恒转矩调速范围,目前的研究主要在于拓宽恒功率区的应用场合。极相调制技术也可以用于拓宽电机转矩/转速范围,已在混合动力汽车得到应用,但是所用功率半导体器件多,电流控制也较复杂[3-4]。
倍。
1 控制系统主电路
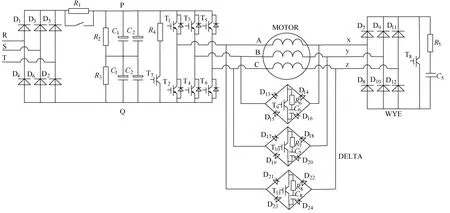
图1 电机/△变换电路拓扑
2 按转子磁场定向的异步电动机?/△变换矢量控制系统
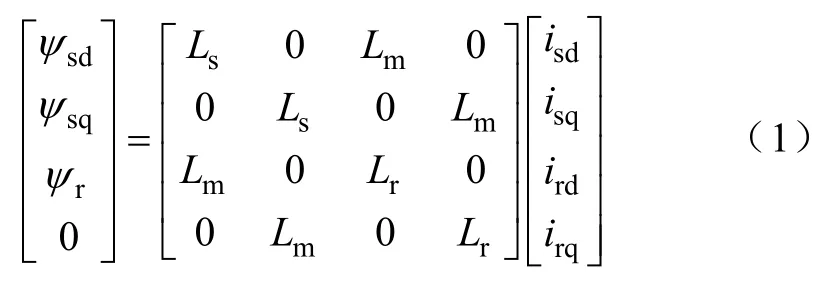
磁链方程
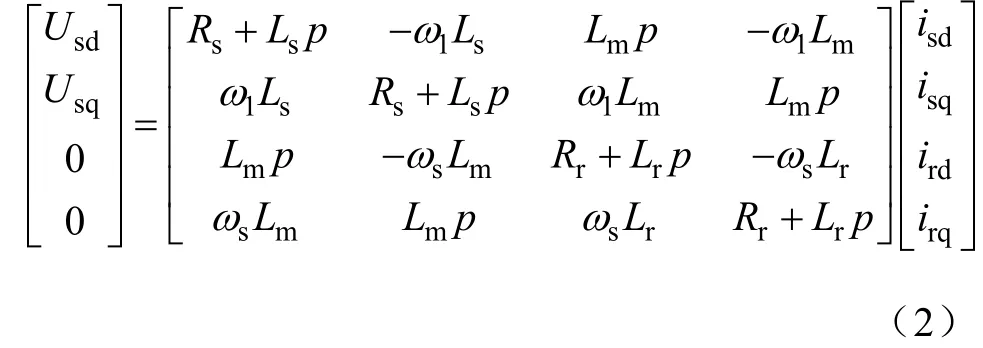
电压方程
电磁转矩方程

机械运动方程

由以上公式可以推导得到
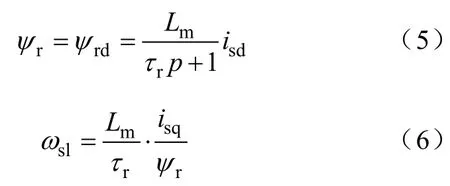
式中,转子磁链ψr的大小由惟一变量 isd(定子电流励磁分量)确定,当电机稳态运行时,ψr稳定,ωsl由 isq惟一确定。所以,转子磁场定向控制可以实现磁通和转矩的解耦控制。
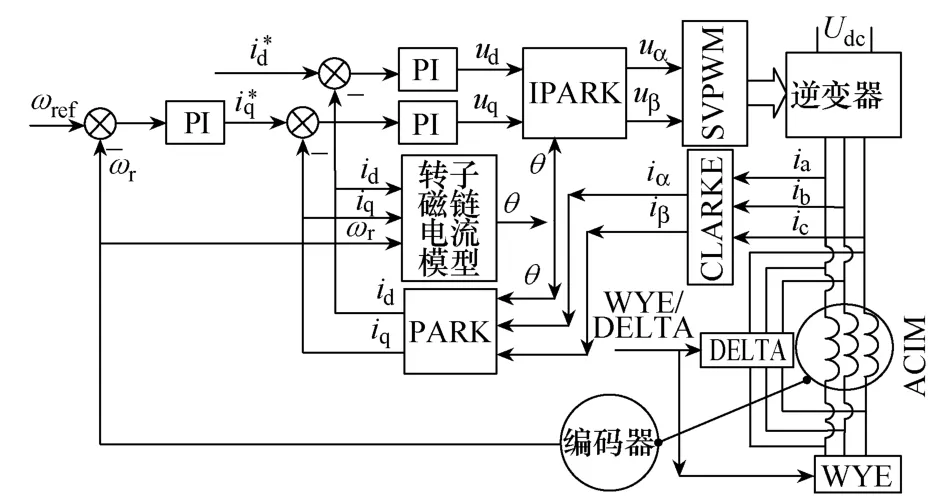
图2 /△变换拓宽异步电机恒转矩调速范围系统框图
3 系统仿真分析
Matlab/Simulink上的模型库里面的异步电动机模型是型接法的,不能用于/△变换,但是,/△变换不改变电机内部的电磁关系,只改变外部接线,所以可以根据异步电动机的数学模型搭建了开放式绕组笼型异步电动机仿真模型[8],并构建/△变换时转子磁场定向控制系统的仿真模型,其系统结构如图 2所示。选用Y90L-4三相异步电动机为控制对象,电机参数如下:额定功率 1.1kW,额定电压 380V,额定电流 2.7A,额定转速1400r/min,额定转矩7.5N·m,定子相电阻7.00Ω,转子相电阻6.06Ω,定子/转子漏感0.043H,励磁电感0.595H,仿真环境设置如下:Y型接法空载启动,给定转速为1400r/min,0.25s时施加7N·m的负载,0.52s时进行/△变换,变换时间t1=0.0025s,0.5225s切换完成,电机△型接法运行,给定转速为1404r/min,0.62s时给定转速变为 2500r/min,SVPWM模块的采样周期为0.0001s,仿真算法选择ode23tb,误差容限为1e-6,最大步长为1e-5。仿真结果如图3所示。如果/△变换所用时间较多,以t1=0.005s为例,则其转速和电流波形如图4所示。
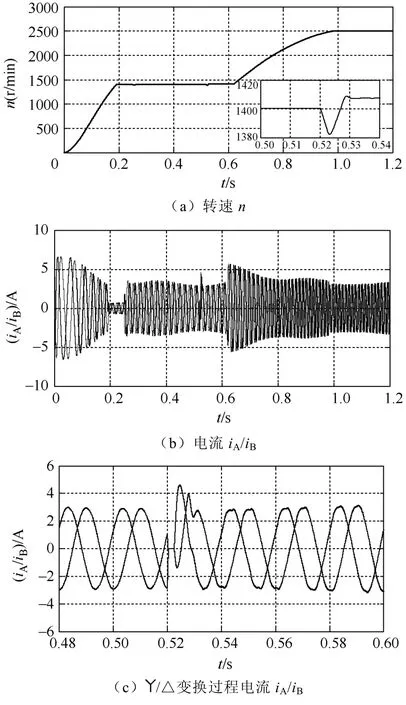
图3 /△变换时间为t1=0.0025s仿真波形
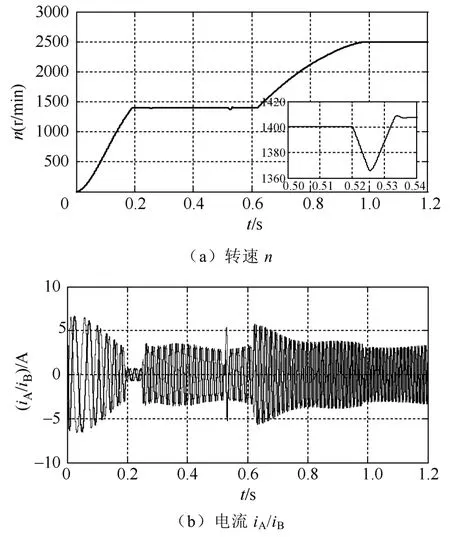

图4 /△变换时间为t1=0.005s的仿真波形
4 实验结果分析
本文搭建了以 TMS320F2812为控制核心的实验平台,选用智能功率模块PM25RLA120实现三相全桥逆变,选用分立元件IGW15T120与不控整流桥组合实现/△变换,选用Y90L-4三相异步电动机为控制对象,电机参数如前。该电动机驱动一台直流发电机为负载进行性能测试,实验平台如图5所示。

图5 实验平台实物图
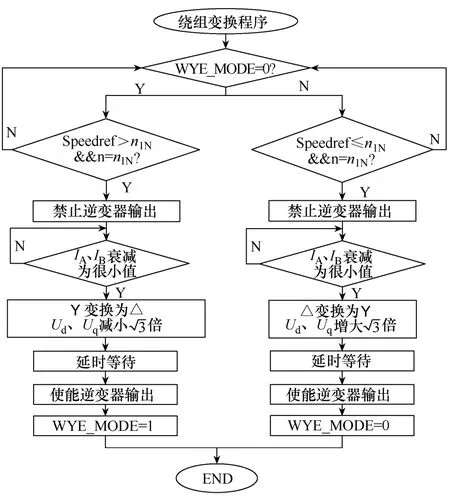
图6 /△变换流程图
图7示出了负载转矩为7N·m恒值时,在不同转速、不同连接下的电机A相、B相电流波形,图8为/△正变换及反变换过程的电流波形,其中型连接时的转速为 1400r/min,△型连接时的转速为1404r/min。
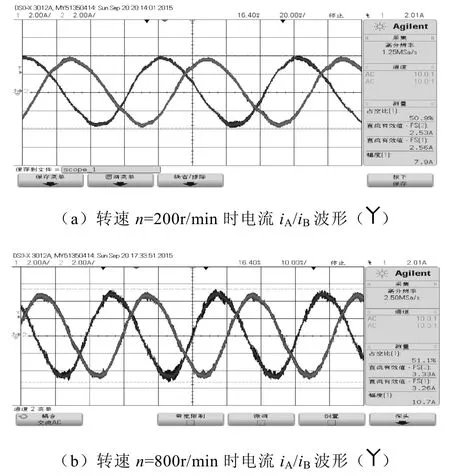
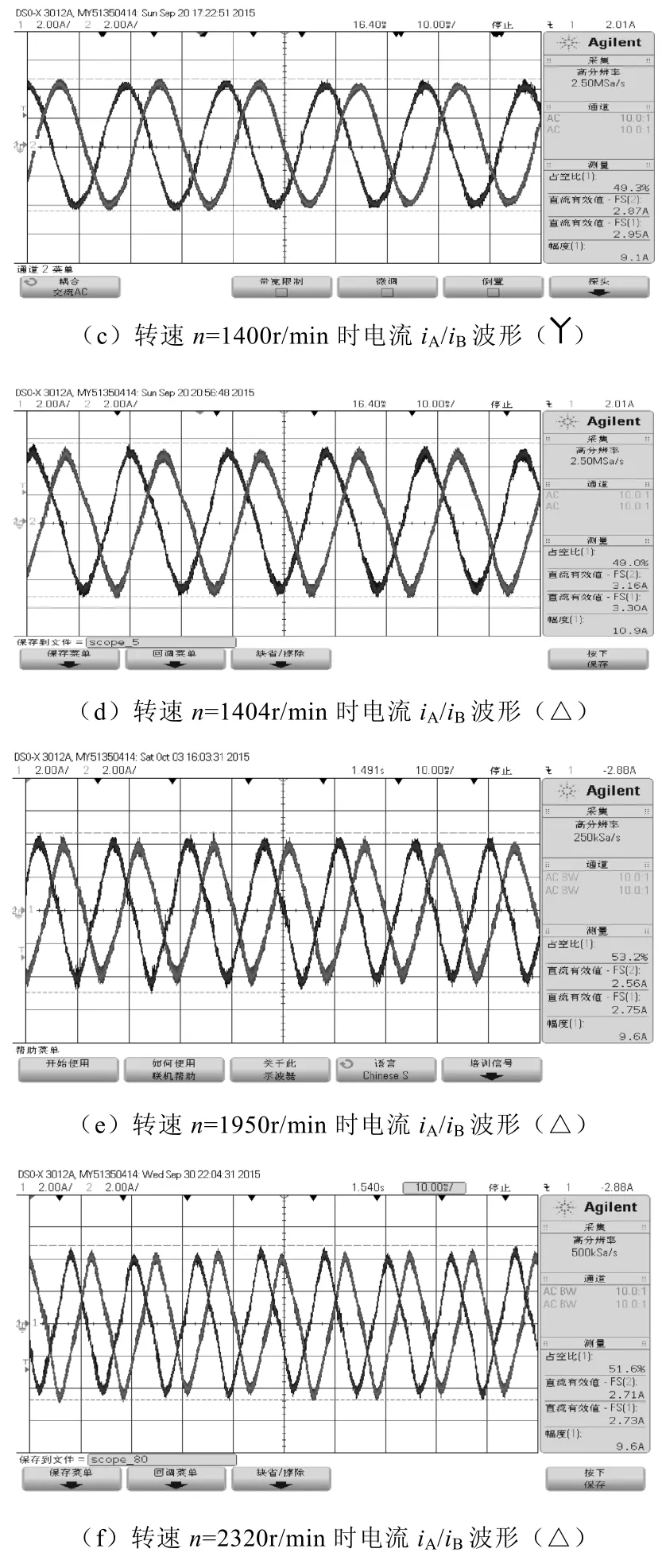
图7 稳态电流波形
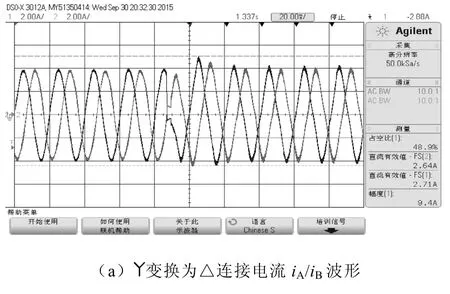
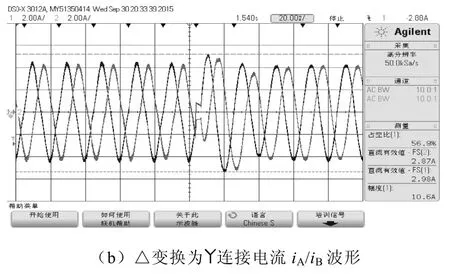
图8 /△变换过程电流波形
图7电流波形表明,图1所示的主电路在额定负载情况下不同转速时的电流幅值基本相同且电流波形正弦,采用/△变换拓宽恒转矩调速范围方法可行。图8电流波形表明,在负载条件下,图1所示的主电路可以可靠实现/△变换,变换后经过短暂的调节重新达到稳态运行,变换过程的电流变化与仿真结果基本一致,而且/△变换时间很短,为2.5ms,对动态性能影响很小。
5 结论
[1] 陈伯时, 陈敏逊. 交流调速系统[M]. 北京: 机械工业出版社, 1998.
[2] Yushi Takatsuka, Hidenori Hara, Kenji Yamada, Akihiko Maemura, Tsuneo Kume. A wide speed range high efficiency EV drive system using winding changeover technique and SiC devices. Proceedings of The 2014 International Power Electronics Conference, Hiroshima, 2014(18-21): 1898-1903.
[3] Tsuneo J. Kume, Mahesh M. Swamy, Mitsujiro Sawamura, KenjiYamada, Ikuma Murokita, "A Quick Transition Electronic Winding Changeover Technique for Extended Speed Ranges," CD-ROM IEEE Power Electronics Specialists Conference 2004, Aachen, Germany.
[4] 孙东森, 葛宝明, 吴伟亮, 等. 极相调制感应电机的建模与控制[J]. 中国电机工程学报, 2012(18): 80-87, 181.
[5] Ferreira F J T E, Cistelecan M V, Anibal T. de Almeida. Comparison of different tapped windings for flux adjustment in induction motors[J]. IEEE Trans. on Energy Conv., 2014,29(2).
[6] 李贺龙. 基于双逆变器的开放式绕组感应电机矢量控制系统的研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
[7] 汤梦阳. 异步电机矢量控制与参数辨识研究[D]. 重庆: 重庆大学, 2014.
[8] 黄守道, 邓建国, 罗德荣. 电机瞬态过程分析的Matlab建模与仿真[M]. 北京: 电子工业出版社, 2013.
Extended Constant Torque Range for Asynchronous Machine Drive Using WYE-DELTA Winding Changeover Technique
Su Zhicong Wang Rongsheng
(Electrical Engineering and Automation Institute of Fuzhou University, FuZhou 350116)
A wide constant torque range vector-controlled asynchronous machine drive using/△winding changeover technique is presented. According to the mathematical model of asynchronous motor ,the simulation model of open-winding asynchronous motor and its direct vector control induction machine drive using WYE/DELTA winding changeover technique was established with Matlab/Simulink. The experimental platform was also set up based on the TMS320F2812 DSP controller. The experiment results and the simulation results showed the constant torque range of the induction machine was extended and the power density was proved.
WYE-DELTA winding changeover; constant torque; asynchronous machine
苏志从(1987-),男,福建省泉州市人,硕士研究生,研究方向为新型电机设计与控制技术。
